
Fターム[2F069AA42]の内容
測定手段を特定しない測長装置 (16,435) | 測定内容 (3,272) | 長さ (547) | 高さ (75)
Fターム[2F069AA42]に分類される特許
1 - 20 / 75
鋼線長さの評価方法、鋼線の巻取方法および巻取製品
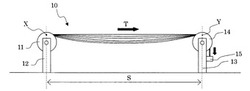
【課題】複数本にて引き揃えられた鋼線の束を構成する各鋼線の長さを、簡易にかつ正確に評価することができる鋼線長さの評価方法を提供する。また、この評価方法を用いることで、複数本の鋼線を誤差の少ないほぼ同一の長さで巻き取ることができる鋼線の巻取方法、および、これにより得られる巻取製品を提供する。
【解決手段】複数本にて引き揃えられた鋼線の束10を構成する各鋼線1の長さを評価する方法である。鋼線束10を、水平方向距離Sの間隔を有しかつ同じ高さに位置する2つの支持点X−Y間に掛け渡した状態で、鋼線束の一端を固定して他端に一定の張力を掛けたときの各鋼線のなす曲線の最低高さと支持点の高さとの差dを計測して、得られた計測値dに基づき、2つの支持点間における各鋼線の長さLを算出する。
(もっと読む)
路面凹凸評価システム

【課題】路面の凹凸評価或いはそれに必要な計測を行うことが出来、路面の凹凸評価或いはそれに必要な計測を行う車両の走行速度の変動に対処することが出来る路面凹凸評価システムの提供。
【解決手段】車両(1)に搭載された路面凹凸評価装置(10)と、当該車両(1)の車速を計測する速度センサ(4)と、当該車両(1)の垂直方向(上下方向)加速度を計測する加速度センサ(6)と、衛星(7)からの信号に基づいて当該車両の現在位置の情報(位置情報)を取得する装置(GPSレシーバー8)を備えている。
(もっと読む)
角型電池の外形測定装置
【課題】測定値のばらつきが小さく精度の良い角型電池の外形測定装置を得る。
【解決手段】電池7の垂直方向の外周面を把持しかつ7の水平方向の位置決めを行い、かつ電池姿勢を垂直に位置決めする側面位置決め機構22と、7の水平方向の外周面に当設可能であって7の水平面の垂直方向の位置決めをする水平面位置決め機構23と、搬送治具8に7を載置面から切り離す手段20を備え、7の垂直方向の外形を測定する際に、22により7の水平方向の位置決めと姿勢を垂直に位置決めし、かつ20により載置面から7を切り離した状態で、垂直方向外形測定手段12により7の垂直方向の外形を測定し、7の水平方向の外形を測定する際に、23により7の垂直方向の位置決めをし、かつ20により載置面から7を切り離した状態で、水平方向外形測定手段13により7の水平方向の外形を測定する角型電池の外形測定装置。
(もっと読む)
3次元測定方法
【課題】 被測定物の形状を高精度で測定する3次元測定方法を提供する。
【解決手段】 ウエーハ上のアライメントマーク29の高さに合わせて、カメラ8のフォーカス高さをZ2軸ステージ9により調整する。このフォーカス高さに合わせて校正用アライメントマーク10の高さをZ3軸ステージ11により調整する。この状態で、校正用アライメントマーク10の中心位置を、カメラ8とプローブ1にて測定し、この2つのカメラ8とプローブ9の距離オフセット(Xo,Yo)を高精度に求める。このオフセットを用いて、カメラ8で測定したウエーハ上のアライメントマーク29の座標を、プローブ1の座標系に高精度に変換する。プローブ9でウエーハ上のレンズを測定すれば、ウエーハ上のアライメントマーク29位置を基準で高精度にレンズ中心を求めることができる。
(もっと読む)
チューブの測定方法及びそれを用いた流体輸送装置の製造方法並びに流体輸送装置
【課題】短時間のうちに非破壊でチューブの内径を測定できるチューブの測定方法及びそれを用いた流体輸送装置の製造方法並びに流体輸送装置を提供する。
【解決手段】チューブの測定方法は、チューブ50の長手方向の長さLを測定すること、第1の物質aを充填した状態でのチューブ50の第1の重量を測定すること、第2の物質wを充填した状態でのチューブ50の第2の重量Mwaterを測定すること、第1の重量Mairと第2の重量Mwaterとの差分からチューブ50の内容積Vを算出すること、内容積Vと長さLとにより、チューブ50の平均断面積Sを算出すること、及び、平均断面積Sより、チューブ50の内径IDを算出すること、を含む。
(もっと読む)
移動体の障害認識方法及び障害認識システム
【課題】精度良く障害を認識することができる移動体の障害認識方法を提供する。
【解決手段】本発明の一形態に係る移動体の障害認識方法は、移動体の障害認識方法であって、移動体の路面データ取得手段で少なくとも高さデータを含む路面データを取得するステップと、取得した路面データを高さ順に並べ替えるステップと、並べ替えた路面データの変化点を抽出するステップと、変化点を境に障害を認識するステップと、を備える。これにより、精度良く障害を認識することができる
(もっと読む)
物品の表面性状判定方法
【課題】 物品の表面の筋目の存在を容易かつ精度良く判定できるようにする。
【解決手段】 第1工程で、物品の表面の位置に対する高さの関係を示す第1の曲線(粗さ曲線)を相互に平行な複数の測定ラインに沿って測定し、第2工程で、第1の曲線をフーリエ変換することで物品の表面の凹凸の周波数に対する振幅の関係を示す第2の曲線に変換し、第3工程で、複数の第2の曲線のピークの重なり状態に基づいて物品の表面に測定ラインに交差する方向の筋目が存在するか否かを判定するので、複数の測定ラインに沿って第1の曲線を求める始点位置がずれても筋目の存在を確実に判定することができ、しかも第2の曲線のピークの高さから筋目の深さあるいは高さを求めることができる。
(もっと読む)
平坦度測定装置及び平坦度測定方法
【課題】コンベアベルトの振動の影響を補正できる平坦度測定装置及び平坦度測定方法を提供する。
【解決手段】コンベアベルト34と、前記コンベアベルト34を回転することにより駆動するロールと、前記コンベアベルト34の振動を検出するための第1のセンサ38と、シート32の先端の高さ位置を測定するための第2のセンサ40と、前記第1のセンサ38からの信号と、前記第2のセンサ40からの信号と、を受信して解析するための制御部と、を備え、前記制御部は、前記コンベアベルト34の接続部が前記ロール上に無いと判断したときは、前記第2のセンサ40からの信号に基づいて前記シートの平坦度を算出する際、前記第1のセンサ38からの信号に基づいて前記コンベアベルト34の振動による影響を補正した平坦度を算出し、前記コンベアベルト34の接続部が前記ロール上にあると判断したときは、前記シート32の平坦度を算出しない平坦度測定装置。
(もっと読む)
表面形状測定装置及び表面形状測定方法
【課題】複数の測定面領域が互いにオーバーラップ領域を持たない場合などでも、複数の面測定データの相対位置関係を高精度に合わせることができる表面形状測定装置及び表面形状測定方法を提供する。
【解決手段】表面形状測定装置10は、光学的表面形状測定機11と触針式検出器22などの高さ測定機を備え、光学式表面形状測定機11で測定した複数箇所の測定面領域の各面測定データにおける高さ測定点の各測定値の相対的位置関係を、高さ測定機22で測定した前記高さ測定点の各測定値の相対的位置関係に合わせるように前記各面測定データを移動補正する。
(もっと読む)
重心高さ計測装置、自動車検査システム、及び重心高さ計測方法
【課題】正確に且つ短時間で物体の重心高さを測定することができる重心高さ計測装置、及び重心高さ計測方法を提供する。
【解決手段】本実施形態に係る重心高さ計測装置40は、振り子の原理により物体の重心高さを計測する重心高さ計測装置40であって、車両(物体)1を搭載する揺動ユニット19と、揺動ユニット19を支持して左右対称な振り子の円弧軌道に沿って揺動させる揺動ガイド28と、揺動ユニット19に応力を与えて揺動ユニット19を揺動させる揺動手段16と、揺動ユニット19の揺動周期を検知する変位センサ(揺動周期検知手段)8と、変位センサ8により検知された揺動周期に基づいて車両1の重心位置を演算する重心位置演算手段10と、を備えて構成されている。
(もっと読む)
測定データ無線転送システム
【課題】消費電力が低く、且つ混信の発生を防ぐことのできる測定データ無線転送システムを提供する。
【解決手段】複数の子機10と、各子機10から送信された測定データを受信する親機20とを備えた測定データ無線転送システム100において、子機10の各々は、初期設定時に親機20に対して、所定の基準時点から測定データを送信するまでの待ち時間を設定する待ち時間情報を含む設定データを要求する設定要求信号を出力し、親機20からの設定データに基づいて測定データの送信タイミングを制御し、測定データの送信タイミングには親機20との通信を行う通信部11を起動状態とさせ、当該測定データの送信後には通信部11を停止させ、親機20は、子機10の各々が互いに異なる送信タイミングで測定データを送信するよう待ち時間情報を決定し、設定要求信号に応じ、複数の子機10に対して待ち時間情報を含む設定データを送信する。
(もっと読む)
回転確認機構
【課題】全周にわたり高さなどの変位を測定するための回転装置において、測定対象が回転していることを簡易な構造で確認できる手段を提供する。
【解決手段】全周にわたり高さなどの変位を測定するための回転装置において、測定対象である回転対象物の上面に載置されるおもりの回転を、該おもりに備え付けられた検知対象部の通過により確認する回転確認機構であり、上記おもりは、上記回転対象物の被測定部位を覆わず、回転とともに該被測定部位の変位を測定することが可能な形状であり、前記回転対象物に回転力を与える機構と接触しないことを特徴とする回転確認機構を提供する。
(もっと読む)
設備機器
【課題】 床からの寸法位置を検出し、その測定結果から所定情報を演算する演算手段を有することにより、使用者の成長に関連する情報を報知することを可能とする。
【解決手段】 本発明では、ジャッキまたはレールに取り付けられている寸法位置検出手段によって大便器の高さ位置を測定し、その結果から下肢長さ寸法を推定演算している。大便器の寸法位置検出手段において測定された高さ位置情報は、制御手段の中にある報知手段によって使用者に報知され、使用者は報知された位置情報をもとに上下手段を操作することにより、便器を最適な位置まで移動させることができ、下肢長さ寸法を推定演算することができる。
(もっと読む)
測定装置
【課題】移動しながら同一の被測定物を複数回測定したときに正しい高さ得る。
【解決手段】測定間隔算出部21は、速度センサ部13によって測定された車両1の速度測定値から、距離センサ部14が1つの被測定物100を複数回測定可能な測定時間間隔を算出し、指示部22は、算出された測定時間間隔で測定を行なうよう距離センサ部14へ指示する。判断部24は、距離センサ部14から出力された距離測定情報から、測定の対象とする被測定物と、実際に測定した被測定物100の形状が一致するか否かを判断し、形状が一致すると判断した場合、被測定物100を測定したときに連続して得られた距離測定情報の中から最小の距離を示す距離測定情報を選択し、これを正しい距離測定情報とする。地上高算出部26は、選択された距離測定情報で示される距離測定値に、距離センサ部14の測定の始点から地上までの距離を加算し、被測定物100の地上高値を算出する。
(もっと読む)
特定部位検出方法、及び該方法を用いた試料分析装置
【課題】従来のデジタル画像相関法では負荷試験前後の試料上の同一点を探索するために輝度画像上で識別可能な模様が必要であり、こうした模様がない場合にはマーキングを行う必要があった。本発明ではこうしたマーキングを行うことなく高い精度での同一点探索を行えるようにする。
【解決手段】金属試料片では表面の平滑化処理を行っても、微細で且つ試料毎及び部位毎に相違する凹凸プロファイルが存在する。そこで、負荷試験前の試料の凹凸プロファイル(基準高さ分布)と負荷試験後の試料の凹凸プロファイル(比較対象高さ分布)とを用い(S1、S2)、デジタル画像相関法と同様の手法により相関係数の分布を求め(S3〜S8)、最大の相関係数を与える位置が同一点であるとして(S9、S10)、負荷試験前の試料上の注目点に対応する負荷試験後の試料上の点を求める。
(もっと読む)
車高測定装置
【課題】車体と路面との距離を高精度に測定が可能な車高測定装置を提供する。
【解決手段】車体4に設けられ、車体4と路面との距離を超音波を用いて測定する車高測定装置1Rは、超音波を路面の所定部位に向けて発信するとともに前記所定部位から跳ね返った反射波を受信する受発信手段を備え、前記所定部位は、自車の移動に伴い自車の車輪が踏んだ跡であり、前記受発信手段の車体4に対する取り付け位置は、車幅方向において車両直進時の左後輪2Rの車輪幅内であり、且つ、左後輪2Rに対し車体後方側に設けられたマッドガード3の後方とした。
(もっと読む)
リソグラフィ装置及び測定方法
【課題】レベルセンサのプロセス依存型オフセット誤差を正確に修正する費用有効性の高い方法を提供する。
【解決手段】基板W(たとえば基板を支持するための基板テーブルを備えたリソグラフィ装置内の基板)を露光する方法には、第1及び第2のセンサ10,11を使用して少なくとも1つの基板Wの一部の第1及び第2の高さ測定を実行するステップと、測値の差に基づいてオフセット誤差マップを作成し、且つ、記憶するステップと、第1のセンサ10を使用して高さ測定を実行することによって、前記基板W(又は前記部分と類似した処理が施された他の基板)の複数の部分のハイト・マップを作成して記憶し、且つ、オフセット誤差マップによってこのハイト・マップを修正するステップと、前記基板W(又は他の基板)を露光するステップが含まれている。
(もっと読む)
リソグラフィ装置及び測定方法
【課題】レベルセンサのプロセス依存型オフセット誤差を正確に修正する費用有効性の高い方法を提供する。
【解決手段】基板W(たとえば基板を支持するための基板テーブルを備えたリソグラフィ装置内の基板)を露光する方法には、第1及び第2のセンサ10,11を使用して少なくとも1つの基板Wの一部の第1及び第2の高さ測定を実行するステップと、測値の差に基づいてオフセット誤差マップを作成し、且つ、記憶するステップと、第1のセンサ10を使用して高さ測定を実行することによって、前記基板W(又は前記部分と類似した処理が施された他の基板)の複数の部分のハイト・マップを作成して記憶し、且つ、オフセット誤差マップによってこのハイト・マップを修正するステップと、前記基板W(又は他の基板)を露光するステップが含まれている。
(もっと読む)
加工装置、および、加工具と被加工物の距離補正方法
【課題】回転刃の刃先と被加工物の高さ方向の距離を正確に補正する。
【解決手段】ルータビット43と、多軸ロボット3と、接触式変位計7と、レーザ変位計8と、高さ補正部とを有する。多軸ロボット3は、ルータビット43を軸回転させ、被加工物100に対して移動させる。接触式変位計7は、多軸ロボット3がルータビット43の刃先を変位計測面7Aに上から押し当てたときに生じる変位を計測する。レーザ変位計8、変位計測面7Aと被加工物100の相対的な高さを計測する。高さ補正部は、接触式変位計7とレーザ変位計8の計測結果に基づいて、ルータビット43の刃先と被加工物100との高さを補正する。
(もっと読む)
電子機器
【課題】衝撃による電子機器の損傷を正確に検出して、衝撃による弊害を理想的な状態で防止する。
【解決手段】電子機器は、加速度を検出する加速度センサ8と、この加速度センサ8で検出する加速度から落下高さを演算する演算回路52とを備えている。演算回路52は、加速度センサ8から入力される加速度信号を演算して落下高さを検出し、落下高さから落下の程度を判定している。
(もっと読む)
1 - 20 / 75
[ Back to top ]