
Fターム[2F069AA77]の内容
測定手段を特定しない測長装置 (16,435) | 測定内容 (3,272) | 角度 (430) | 面の角度 (48)
Fターム[2F069AA77]の下位に属するFターム
Fターム[2F069AA77]に分類される特許
21 - 38 / 38
運動誤差測定基準及び運動誤差測定装置
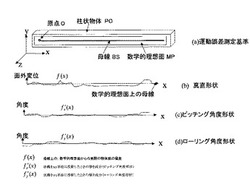
【課題】ピッチング誤差やローリング誤差を抽出でき高精度な測定を行える運動誤差測定基準、運動誤差測定装置を提供する。
【解決手段】運動誤差測定基準は、例えばベースに対して所定の方向に移動可能に支持されたステージの運動誤差を求める測定装置で利用することが出来るものであり、前記母線に沿って前記原点からの距離が既知である所定点において、実際の物体面と、母線が構成すべき数学的理想面との差が、面外への微小変位と、面法線の方向の微小角変位に関して校正されており、その校正値が記憶されて演算に供しうる数値データとして付与されているものである。
(もっと読む)
情報処理方法、情報処理装置およびプログラム

【課題】 金型部品のような物品を検査する際、物品の実測により得られた点群データと、物品に関する規定の設計データとの関連付けに誤りが生じることを防止する。
【解決手段】 部品に関し規定された設計データの面の形状を表す特徴値と、部品の実測により得られた点群データについて算出した特徴値とを対比することにより、点群データと設計データの面とを関連付ける。
(もっと読む)
塗装検査装置及び塗装検査方法
【課題】塗装の補修により発生する微小傷群を、作業者が確実に視認することが可能であって、作業者の官能に頼らず客観的に塗装の良否を判断できる装置を提案する。
【解決手段】塗装面Fの検査部位Faに光を照射する照明手段11と、検査部位Faの表面での反射光を撮像する撮像手段12と、該撮像手段12から信号を受けて画像処理を行う画像処理手段21と、検査部位Faの表面と撮像手段12との距離を検出する変位検出手段13Aと、検査部位Faの表面と撮像手段12の光軸との垂直度を検出する垂直度判定手段13Bと、変位検出手段13A・垂直度判定手段13Bからの信号を受けて撮像手段12と検査部位Faの表面との距離及び角度が検査可能な状態であるか否かの判定を行う判定手段13とを、塗装検査装置8に備えた。変位検出手段13A及び垂直度判定手段13Bとして超音波式変位センサを採用し、距離と同時に垂直度を検出可能とした。
(もっと読む)
ホイ−ルアライメント測定方法およびその測定装置
【課題】 例えば前輪のト−角測定および調整に好適で、車両のステアリング機構によるヒステリシス情報を基にアライメントを測定し、実際のアライメント状態に合致した正確なアライメント情報を得られるとともに、測定値のバラツキを低減し、測定値の再現性の向上を図れる、ホイ−ルアライメント測定方法およびその測定装置を提供すること。
【解決手段】 水平面と平行に回動可能なロ−ラフレ−ム32に設けた複数のロ−ラ33に車輪34を載置する。
前記車輪34のアライメントを測定するアライメント測定方法であること。
前記ロ−ラフレ−ム32を、被検車両のステアリング機構のヒステリシス位置情報を基に所定角度回動する。
ロ−ラフレ−ム32の前記回動位置でアライメントを測定する。
(もっと読む)
ホイ−ルアライメント測定方法およびその測定装置
【課題】 例えば前輪のト−角測定および調整に好適で、車両のステアリング機構によるヒステリシス情報を基にアライメント測定し、実際のアライメント状態に合致した正確なアライメント情報を得られるとともに、簡単な構成によって測定値のバラツキを低減し、測定値の再現性の向上を図れる、ホイ−ルアライメント測定方法およびその測定装置を提供すること。
【解決手段】 水平面と平行に回動可能な複数のロ−ラ20に車輪21を載置する。
前記車輪20のアライメントを測定するホイ−ルアライメント測定方法であること。
前記車輪20に連係するステアリングホイ−ル28を、そのステアリング機構のヒステリシス位置情報を基に所定角度回動する。
前記ステアリングホイ−ル28の所定角度回動位置でアライメント測定する。
(もっと読む)
面形状計測方法、姿勢計測方法、及び露光方法
【課題】 移動体としてのステージ自体に歪みが生じていてもステージの位置検出精度を向上させることができる面形状計測方法等を提供する。
【解決手段】 レーザ干渉計13を用いてウェハステージWSTに設けられた移動鏡12のZ軸に対する傾きを計測し、この計測結果に基づいてZ軸に対する移動鏡12の傾きが零となるようにウェハステージWSTの姿勢を制御し、多点フォーカス位置検出系21を用いてこのときのウェハステージWSTの姿勢を計測する。以上の処理を計測対象の移動鏡12の鏡面に沿ってウェハステージWSTを微小移動させながら繰り返す。
(もっと読む)
近接場光顕微鏡、近接場光による試料測定方法
【課題】 プローブの試料への衝突による破損を防ぎ、確実かつ短時間でプローブを試料に対して接近させることが可能な近接場光顕微鏡を提供する。
【解決手段】 近接場光プローブ2先端から試料までの距離を検出する距離検出手段31と、近接場光プローブ2の基準面位置情報に基づいて近接場光プローブ2と試料20を近接場光領域もしくはその近傍まで接近させる距離制御手段15とを備えた近接場光顕微鏡。
(もっと読む)
3次元形状計測方法および装置
【課題】評価対象の微小凹凸歪みが測定できる十分な精度を実現するとともに、3次元的にうねった滑らかな凸平面形状から定量的な凹凸歪みの評価を可能にすること。
【解決手段】3次元形状測定器10によって取得された3次元の点群データに基づき、ワークWの3次元形状を測定する3次元形状測定装置および方法において、ステージ2に沿って上下方向に移動する測定ヘッド1と、前記測定ヘッド1および前記ステージ機構2に接続され、前記ステージ機構2の駆動により得られた3次元の点群データから凹凸歪みを評価する制御処理装置3とから成り、異なる角度における一定距離毎に平行にずらした各断面において、基準点と前後の2点からなる傾斜の変化角度を基準点をずらしながらそれぞれデータを求めて、凹凸歪みの評価を行うものである。
(もっと読む)
路面角度の算出装置及び算出方法
【課題】 車体に設置された加速度センサから得られる加速度情報から速度を算出する上で、車速パルスを用いることなく路面角度を算出し、速度の精度を高める。
【解決手段】 車体に設置された加速度センサ1から得られた、路面に平行な加速度成分Axと路面に垂直な加速度成分Azの値から路面角度αを算出する角度算出手段4と、前記AxとAzの値から重力加速度をgとして│Ax2+Az2−g2│の値を計算する第一演算手段2と、前記│Ax2+Az2−g2│の値が正であり、且つある設定値T1より小さいか否かを判断する第一比較手段3とを備え、第一比較手段3の判断の結果、前記AxとAzが0<│Ax2+Az2−g2│<T1の条件を満たしていれば、算出直後の路面角度αを旧路面角度に代わって更新する。
(もっと読む)
歯車監視方法及びその装置
【課題】 きわめて簡便な手段で以って、互いに噛合う2つの歯車段の噛合い状態の良否を正確に判定可能として、歯車の回転状態の良否を正確に監視できる歯車監視装置を提供する。
【解決手段】 歯車軸と該歯車軸に取り付けられた歯車とよりなる歯車段を噛み合わせて構成される歯車伝動装置における歯車の回転状態を監視する歯車監視手段において、互いに噛合う複数の前記歯車段のそれぞれについて前記歯車軸の径方向の移動量を検出し、前記移動量検出値に基づき各歯車段毎の歯車軸の傾き量を算出し、前記各歯車段の傾き量算出値に基づき前記互いに噛合う歯車段の相対傾き量を算出し、該相対傾き量に基づき前記歯車の歯当たりを含む歯車の回転状態の良否を判定することを特徴とする。
(もっと読む)
バンク角推定装置
【課題】ヨーレートや横加速度を用いることなく、路面のバンク角を推定する。
【解決手段】検出部22は、車輪5に作用する横力Fyと上下力Fzとを直接的に検出する。推定部21aは、横力Fyに基づいて、車両の横方向に作用する車両横力FYを推定し、上下力Fzに基づいて、車両の上下方向に作用する車両上下力FZを推定する。そして、車両横力FYと車両上下力FZとを演算パラメータとして用いて、車両横力FYに対する車両の遠心力と重力とのオフセット量と、車両上下力FZに対する車両の遠心力と重力とのオフセット量とに基づいて、路面のバンク角θを推定する。
(もっと読む)
液晶関連装置における圧着装置の押圧面間の平行度検出装置
【課題】 加圧ツールおよび圧着台の押圧面間に圧力測定フィルムを自動的に挿入し、両押圧面間で加圧された圧力測定フィルムを撮像位置に移動して撮像装置により撮像することにより、両押圧面間の平行度を自動的に効率的に検出する。
【解決手段】 フィルム自動巻取り装置25により圧力測定フィルム23の未加圧部分が自動的に使用位置24に繰り出される。使用位置に繰り出された未加圧部分が加圧ツール15および圧着台16の押圧面17,18間の加圧位置26に移動される。両押圧面間で加圧された測定フィルムの既加圧部分が撮像位置27に移動されて撮像装置28により撮像される。両押圧面間で加圧された測定フィルムの既加圧部分の撮像画像に関する情報が出力装置53に出力される。
(もっと読む)
表裏面の偏心及び傾きの測定方法及びその装置
【課題】 レンズ等の表裏面の偏心及び傾きを高精度に測定する表裏面の偏心及び傾きの測定方法及びその装置を提供する。
【解決手段】 レンズ202と真球203a,203b,203cの形状を表面側及び裏面側から測定可能な被測定物保持治具201を用いてレンズ202の三次元形状データと真球203a,203b,203cの中心点座標を測定し、真球203a,203b,203cの中心点座標を基準にレンズ202の表裏面の三次元形状データを合成し、レンズ表裏面合成データからレンズの表面と裏面との間の偏心及び傾きを算出する。
(もっと読む)
乾式ガスホルダのピストン傾斜検出装置及び乾式ガスホルダ
【課題】 ピストン上に電気機器を配置することなく、かつ、ガスホルダの規模にかかわらずピストンの傾斜を正確に検出し得る乾式ガスホルダのピストン傾斜検出装置、及び当該検出装置を備える乾式ガスホルダを提供する。
【解決手段】 乾式ガスホルダ本体1内部に配置されるピストン2の傾斜を検出する、乾式ガスホルダのピストン傾斜検出装置であって、ピストン2までの距離を計測する少なくとも3基以上の非接触式距離計4、4、…と、非接触式距離計4、4、…の計測値を用いてピストン2の傾斜を算出する演算装置5と、演算装置5の算出結果を表示する表示装置6とを備え、非接触式距離計4、4、…は、乾式ガスホルダ本体1に設けられるとともに、ピストン2よりも上方に配置されている、乾式ガスホルダのピストン傾斜検出装置。
(もっと読む)
アイテムの選択セグメントの体積に対応する数値表示を示すための装置及び方法
【解決手段】アイテムの未切断選択セグメントの重量又は価格を表示する装置及び方法は、位置指示部材を、支持面上に位置するアイテム上方を通過させることを含む。位置指示部材は、一つ以上のセンサを有し、そのセンサが、上記部材が基準位置からアイテム上方の選択された他の位置まで横断される際に、アイテムの連続する横断面輪郭に対応し、アイテムの選択セグメントを規定する信号を生成する。同時に、好ましくは一つ以上の微小構造電子機器(MEMS)加速度計装置から構成された作動検出器配置構造は、アイテムに沿って位置指示器支持部材が移動したときにその作動に対応する信号を生成する。これらの信号は、指示部材の選択された連続位置間に位置するアイテムの未切断選択セグメントの体積を決定すべく、信号処理装置で処理される。これらの累積的な体積決定のそれぞれは、数値重量に変換される、又は、特定のセグメントをアイテムから切断する前に、重量又は価格の情報が見ている顧客に同時に提供される。可視光帯は、センサ・バーからアイテムの特定のタイプの密度要素に基づく部分価格値上に投影され、それにより、部材が上記アイテムに沿って横断されたときに数値的な重量又は(重量に基づく)価格値が表示され、したがってアイテムのオペレータが数値表示に対応する選択セグメントの境界を観察者に明確に示すことが可能となる。 (もっと読む)
測定対象物を測定する方法及び装置
【課題】 測定対象物とくに車両ホイールの測定を、より単純で費用効果的な方式で可能にする。
【解決手段】 本発明は、測定用の対象を測定する方法及び装置に関し、対象物座標系の画定のための少なくとも1つの基準構造を有し、対象に関して固定され、測定システムを用いて、これは測定座標系で測定するための対象の輪郭を記録するための少なくとも1つのセンサシステムを有している。本発明によれば、対象物座標系の位置を考慮に入れて、輪郭データと分析ユニットで実行された輪郭データの処理を決定する目的で、測定用の対象がセンサシステムの記録領域の測定位置に置かれていて、対象物座標系の位置が基準構造を用いて固定され、対象物座標系が測定座標系にリンクされ、センサシステムが測定用の対象に対して回転軸心の周りで回転される。本発明は更に、輪郭決定への利用に関する。
(もっと読む)
パターン生成装置及び表面の物理特性を測定するための装置
本発明は、露光装置での使用を対象とするオブジェクトの表面にパターンを書き込むための方法であって、表面を備えた厚さTのオブジェクトをパターン生成装置のステージの上に配置するステップと、表面を多数の測定ポイントに分割するステップであって、隣接する2つの測定ポイントが所定の最大距離を越えない距離Pで間を隔てられているステップと、各測定ポイントにおける表面の勾配を決定するステップと、各測定ポイントのx−y平面における二次元局部オフセットdを勾配及びオブジェクトの厚さTの関数として計算するステップと、前記表面に書き込むパターンを、二次元局部オフセットdを使用して修正するステップとを含む方法に関する。本発明はまた、パターン生成装置、オブジェクトの表面の物理特性を測定するための方法及び装置に関する。 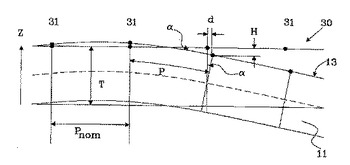 (もっと読む)
(もっと読む)
基台の位置決め装置及び位置決め方法
【課題】 精密機械装置等の基台を、現地で高精度に位置決め固定する基台の位置決め装置及び位置決め方法を提供する。
【解決手段】 基台を支持するV型ブロックとスペーサを介して連結されたレベリングブロック機構と、上面にレベリングブロック機構を備えた上部水平保持リングと、上部水平保持リングをベアリングを介して支持する下部水平保持リングと、下部水平保持リングに設けられた支持脚とから成る水平支持手段を備えている。上部水平保持リングに設けられた位置決め調整用プレートと、位置決め調整用プレートの外側面へ当たる1本の押しボルト、及び位置決め調整用プレートの両側面に当たる2本の押しボルトと、3本の押しボルトを支持するアーム部とから成る回転及びX・Y二次元方向への位置調整手段を備えている。
(もっと読む)
21 - 38 / 38
[ Back to top ]