
Fターム[2F069AA90]の内容
測定手段を特定しない測長装置 (16,435) | 測定内容 (3,272) | 角度 (430) | 特殊な角度 (27)
Fターム[2F069AA90]に分類される特許
1 - 20 / 27
複数の姿勢においてプローブを用いて物体をプロービングすることによってプローブを物体とレジストレーションする方法およびシステム
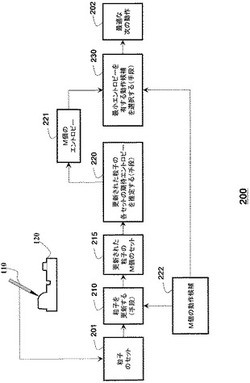
【課題】複数の姿勢においてプローブを用いて物体をプロービングすることによって、プローブが物体とレジストレーションされる方法を提供する。
【解決手段】プローブ110の各姿勢は、ロケーションおよび向きを含む。プローブ110の現在のロケーションの確率分布が、粒子のセットによって表され201、プローブ110の現在の向きの確率分布が、各粒子について、現在のロケーションを条件とするガウス分布によって表される。候補動作のセットが選ばれ215、各候補動作について、粒子のセットに基づく期待不確実性が求められる220。最小の期待不確実性を有する候補動作が、プローブ110の次の動作として選択され230、プローブ110は、次の動作に従って移動され202、粒子のセットは、プローブ110の次の姿勢を用いて更新される210。
(もっと読む)
傾斜角度推定システム、相対角度推定システム及び角速度推定システム

【課題】積分演算をデータ処理に含めず又は積分演算処理工程を最小限しか行わず、回転運動する物体の姿勢又は速度状態を推定する。
【解決手段】一の回転中心点を有し該回転中心点を軸として回転する一の物体と、該回転中心点において一の物体と接続し回転中心点を軸として回転する他の物体との間の相対的角度を推定するシステムであり、一の物体に取付けられた2以上の加速度センサからなる第1の加速度センサ群と、他の物体に取付けられた2以上の加速度センサからなる第2の加速度センサ群と、これらの群の加速度センサからの出力に基づいて物体の傾斜角を算出する演算処理ユニットからなり、第1の群の加速度センサは一の物体上で一線上に整列し、第2の群の加速度センサは一の物体上で一線上に整列し、第1の群を構成する加速度センサを結ぶ線と第2の群を構成する加速度センサを結ぶ線が共に回転中心点を通過する。
(もっと読む)
カメラ校正装置
【課題】周囲の景色によらずカメラの撮像方向を校正することができるカメラ校正装置を提供する。
【解決手段】イメージセンサ140を有するカメラ120と、イメージセンサ140と既知の位置関係にある加速度センサ150と、イメージセンサ140が静止しているときに加速度センサ150によって検知された傾きとイメージセンサ140が移動しているときに加速度センサ150によって検知された傾きとに基づいて、カメラ120の撮像方向を算出するカメラ校正部160とを備える。
(もっと読む)
移動体搭載用機器
【課題】加速度センサの取り付け角度に関係なく、正確に移動体搭載用機器の取り付け角度を算出することが可能な移動体搭載用機器を提供する。
【解決手段】移動体の3軸方向への加速度を検出する加速度センサ131と、移動体が停止状態にある際に加速度センサ131から出力される出力信号に基づいて、重力加速度を算出する重力加速度算出部181と、移動体が加減速移動状態にある際に加速度センサ131から出力される出力信号に基づいて、移動体の移動体加速度を算出する移動体加速度算出部182と、算出された重力加速度と算出された移動体加速度とに基づいて、前記移動体に対する移動体搭載用機器の取り付け角度を算出する取り付け角度算出部183と、を備えるように構成する。
(もっと読む)
スロットロッドのスロット形状検出方法
【課題】 SZonSZスロットの反転角及び捻回ピッチを高精度に連続測定することができるスロットロッドのスロット形状検出方法を提供すること。
【解決手段】 スロットロッドの軸中心に対するスロットの回転角を一定周期でスキャンして検出した値を保持し、現在の回転角の値Aと現在より所定の時間T前にスキャンした回転角の値Bとを比較し、比較値が、値Aが値Bより継続して大きいときから値Aが値Bより継続して小さくなるまでの過程で値Bが値Aの値を超えたとき、または等しくなったときから1/2T前時間における回転角を、回転角の極大の反転部PUA1,PUA2……として検出し、比較値が逆の大小傾向を示すときには値Aが値Bの値を超えたとき、または等しくなったときから1/2T前における回転角を、回転角の極小PLA1,PLA2の反転部として検出することで、反転角及び捻回ピッチが高精度に連続測定できる。
(もっと読む)
車輪模擬装置
【課題】車輪が未装着の車輪取付部に取り付けるだけで車輪のアライメントを精度よく測定することができ、自動車車体を組み立てる組立ラインにて車輪アライメントを測定する際に好適に用いることができる車輪模擬装置を提供する。
【解決手段】自動車の車輪アライメントを測定する際に用いられ、車輪が未装着の車輪取付部3に取り付けて、車輪取付部3に車輪が取り付けられた状態を模擬的に形成する車輪模擬装置1であって、車輪取付部3に連結する連結部10と、車輪取付部3の測定箇所を露出させる開放部11と、車輪取付部3の下方に所定距離を存して設けられた接地部12とを備える。連結部10に、車輪取付部3の軸端に取り付ける取付部材13と、取付部材13に着脱自在に連結する連結手段14とを設ける。
(もっと読む)
鞍乗型車両、および鞍乗型車両の傾き検出装置
【課題】適切に車両の傾きの状態を検出することができる自動二輪車を提供する。
【解決手段】自動二輪車には、車体の進行方向左右の路面Rまでの距離を測定するセンサであって、モーターサイクルの下方向に向けて取付けられる下方距離センサ(左)LL、および下方距離センサ(右)LRと、進行方向左右の路面Rまでの距離を測定するセンサであって、下方距離センサLL,LRよりも外側に向けて取付けられる側方距離センサ(左)SL、および側方距離センサ(右)SRとが設けられている。下方距離センサ(左)LL、および下方距離センサ(右)LRの測定値に基づいて、車両のバンク角θBが算出される。バンク角θBが所定範囲内になければ、側方距離センサ(左)SL、および側方距離センサ(右)SRにより転倒の可能性が判定される。
(もっと読む)
リムずれ測定装置およびリムずれ測定方法
【課題】汎用性が高く、測定対象タイヤの回転時におけるリムずれを連続的に測定することができるリムずれ測定装置およびリムずれ測定方法を提供すること。
【解決手段】リムずれ測定装置1は、タイヤ周方向において不規則に連続して形成される陸溝配列TD3がタイヤ表面に形成された測定対象タイヤTの回転時に陸溝配列TD3に対向して配置され、陸溝配列TD3における凹凸を検出する凹凸検出センサ2と、リムRの基準リム回転位置を検出する回転位置センサ3と、検出された基準リム回転位置から測定対象タイヤTの1回転分で検出された凹凸に基づいて凹凸配列波形を生成する凹凸配列波形生成部46と、リムずれ測定前において測定対象タイヤTの回転時に生成された基準凹凸配列波形およびリムずれ測定中において測定対象タイヤTの回転時に繰り返し生成される回転凹凸配列波形に基づいてリムずれを判定するリムずれ判定部48とを備える。
(もっと読む)
鉄道建築限界測定方法およびその測定装置
【課題】軌道計測データを用いて当該箇所の実曲線半径とカントを算出し、軌道の形状に応じて構造物と車体との離れを正確に算出する鉄道建築限界測定方法およびその測定装置を提供する。
【解決手段】軌道と地上構造物との線路横方向の離れを測定する鉄道建築限界測定方法であって、前記軌道と地上構造物との離れの他に当該軌道上で一定間隔に測定された通り変位を差分法により実測し、水準変位を鉄道車両の台車位置におけるカントにより実測し、前記通り変位及び水準変位の実測値に基づいて当該軌道の局所的な曲率および軌道面の傾斜角を算出する。
(もっと読む)
信号処理装置
【課題】車両が安定走行状態にある時、車高センサやロール角速度センサ等の車両の姿勢状態を検出するセンサの出力信号から、路面の凹凸等の影響による信号雑音を十分に除去することが可能な信号処理装置を提供する。
【解決手段】操舵角・操舵角速度測定部21が、車両1の操舵角X(t)を測定し、操舵角X(t)から操舵角速度Y(t)を算出する。そして、走行状態判定部22が、操舵角X(t)及び操舵角速度Y(t)に基づき車両1の走行状態STSを判定する。この結果、車両1が安定して走行していると判定された時、カットオフ周波数設定部23が、カットオフ周波数Fを信号雑音除去用の低周波数FLに設定し、車両1が安定して走行していないと判定された時、カットオフ周波数Fを位相遅れ防止用の高周波数FHに設定する。そして、ローパスフィルタ24が、車高センサ10L及び10Rの車高変位信号HL(t)及びHR(t)中のカットオフ周波数F以下の周波数成分(HLf(t)及びHRf(f))だけをそれぞれ通過させる。
(もっと読む)
角度計測装置、撮影装置、及び角度計測方法
【解決課題】低コストな構成で、手ぶれ防止機能を有すると共に、精度よく姿勢角を計測することができるようにする。
【解決手段】加速度検知部によってデジタルカメラのx軸方向及びz軸方向に生じる加速度を検知し(100)、検知された加速度のAC成分とDC成分とを抽出する(102)。また、抽出されたDC成分のピーク値を検出して(104)、デジタルカメラの横方向が水平となっている状態におけるDC成分値を検出する。そして、抽出されたDC成分の値と検出されたDC成分のピーク値との差分に基づいて、水平方向に対するデジタルカメラの横方向の姿勢角を計測し(106)、LCDに計測された姿勢角を表示する(108)。また、抽出された加速度のAC成分に応じて、手ぶれ補正レンズを移動させて、手ぶれによる光軸のずれを打ち消し、手ぶれを防止した被写体像を示す画像データを取得する。
(もっと読む)
視線方向判定装置
【課題】運転者の顔の向きを精度よく判定可能な視線方向判定装置を提供すること。
【解決手段】シート3,5、6の着座者の視線方向を判定する視線方向判定装置1において、着座者の頭部とヘッドレスト5との間の頭部距離を検出する頭部距離検出手段30と、頭部距離検出手段30により検出された頭部距離に基づき着座者の視線方向を判定する視線方向判定手段20と、を有することを特徴とする。
(もっと読む)
位置検出装置、自律移動装置、位置検出方法および位置検出プログラム
【課題】音源物体の検出成功率を向上させるとともに安定させること。
【解決手段】ロボット装置100において、画像入力部112によって入力された画像と、音源情報の適用視覚情報とに基づいて画像処理手順を実行して音源物体102の視覚特徴を検出し、音源物体102の少なくとも方位を示す視覚定位情報を出力する視覚特徴検出定位部114と、音声入力部113によって入力された音声と、音源情報の適用聴覚情報とに基づいて音声処理手順を実行して音源物体102の聴覚特徴を検出し、音源物体102の少なくとも方位を示す聴覚定位情報を出力する聴覚特徴検出定位部115と、検出戦略情報に基づいて、視覚特徴検出定位部114または聴覚特徴検出定位部115を制御し視覚定位情報または聴覚定位情報から音源物体102の存在する位置を検出する音源物体検出部116とを備えた。
(もっと読む)
操向角センサを備えた電動式操向装置
【課題】操向軸の回転方向を感知する方向センサ及びモータ軸の回転角を感知するモータ位置センサを用いて絶対操向角を感知することが可能な電動式操向装置を提供して,操向装置の製作費用を縮小すること。
【解決手段】本発明は,自動車の操向ホイールに連結される操向軸102と,操向軸と連動して回転する減速軸601と,発信部603及び受信部605を含む方向センサ607と,減速軸601に設けられ,発信部603と受信部605との間に配設される回転部材609と,モータ軸611を介して操向軸102に操向補助動力を供給するモータ130と,モータ130のモータ軸611の回転角を感知するモータ位置センサ613と,方向センサ607及びモータ位置センサ613から各々発信される電気的信号を受信し,操向角を算出する電子制御装置123と,を含むことを特徴とする電動式操向装置を提供する。
(もっと読む)
移動体の高精度姿勢検出装置
【課題】 移動体に搭載した慣性センサ出力の中から移動体の姿勢演算に不要な慣性成分を除去して、移動体の姿勢検出を精度良く検出することのできる移動体の高精度姿勢検出装置を提供する。
【解決手段】 移動体の高精度姿勢検出装置は、移動体に、当該移動体の慣性を検出する慣性検出手段と、当該移動体の動作を生成する動作生成手段と、姿勢演算を行う演算処理手段を備え、演算処理手段により慣性検出手段の出力と動作生成手段の出力に基づき移動体の姿勢を高精度に検出する。
(もっと読む)
薄膜特性評価方法、薄膜特性評価装置、及び薄膜太陽電池
【課題】 薄膜の表面状態の特性を的確に評価することのできる薄膜特性評価装置及び薄膜特性評価方法を提供すること。
【解決手段】 複数の結晶を含む薄膜の表面において、前記複数の結晶の各々の頂点及び隣りの結晶との境界の位置を示す情報に基いて、前記各結晶の前記境界を前記薄膜の表面と平行であり且つ前記結晶の底面を含む平面である基準平面、に投影させて得られる図形の重心を求める重心計算部と、前記重心と前記頂点とを結ぶ重心−頂点直線が、前記重心を含み前記基準平面に垂直な直線である垂直線と成す角度である結晶傾斜角を算出する結晶傾斜角計算部と、を具備する。
(もっと読む)
方位角計測装置および移動体
【課題】簡素で安価な構成でなおかつ精度の高い方位角計測装置を備えた移動体を提供する。
【解決手段】駆動車輪の回転速度を計測する駆動輪回転速度計測手段と、前記回転角速度推定値ωA312を出力できるジャイロセンサと、前記駆動輪回転速度からオドメトリによって前記回転角速度推定値ωBを計算する運動学演算手段と、前記回転角速度推定値ωA312と前記回転角速度推定値ωB412とを逐次選択する回転角速度推定値選択手段と、前記回転角速度推定値選択手段403の出力を積分する積分器404と、からなる移動体の方位角計測装置を構成し、前記回転角速度推定値選択手段403が常に信頼性の高い回転角速度推定値を出力するようにした。
(もっと読む)
段ボールシートの斜行検出装置及び検出方法並びにスリッタスコアラ
【課題】 段ボールシートの斜行検出装置及び検出方法並びにスリッタスコアラに関し、スリッタスコアラ内部で発生する段ボールシートの斜行を検出できるようにする。
【解決手段】 スコアラ10よりもシート搬送方向上流側に設けられ、段ボールシート5のシート幅方向における位置を検出する第1の位置検出手段20と、スリッタ11よりもシート搬送方向下流側に設けられ、段ボールシート5のシート幅方向における位置を検出する第2の位置検出手段22と、第1の位置検出手段20及び第2の位置検出手段22により検出された段ボールシート5の位置情報に基づいて段ボールシート5の斜行量を算出する算出手段27aとをそなえて構成する。
(もっと読む)
車用静電センサー
【構成】多様な形態の電極(12)を使用した乗員センサーシステムが開示されている。電極(12)はエアバッグ噴出口(44)に隣接して設置でき、それぞれの電極は乗員の近接度に対応する信号を提供する。このシステムは1信号の場合よりも適切な決定を下すことができるように複数の信号を比較するコンパレータをさらに含んでいる。電極(12)を誘電基材(16)上に形成し、電極間をブロックするように提供された接地領域(14)で分離することができる。電極(12)を、片面に導電コーティングを施した誘電材料に取り付けられた導電材料で形成することができる。電極(12)を内装体内に接地導電材料と隣接させて埋設し、1電極にDC電圧を印加して第2電極への導電通路を形成することができる。その導電通路は湿気で提供される。ドライブ電極(22)とレシーブ電極(26)は車の窓と一体的に形成することができる。 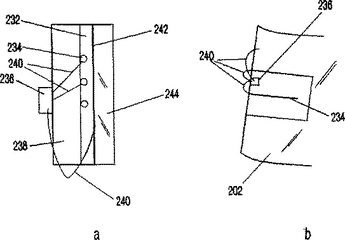 (もっと読む)
(もっと読む)
軸間角度補正方法
【課題】 複数軸をもつ機械の軸間角度補正が高精度に且つ容易に行える方法の提供。
【解決手段】 機械16のテーブル12に置かれた一の基準球36上の指定移動軸方向位置での測定軸方向形状情報をテーブル12の直線移動により同一基準球36上の複数の異なる指定移動軸方向位置について取得する基準球測定工程(S10)と、該形状情報に基づき該基準球36の測定軸方向形状のピーク点での該センサー14よりの測定軸方向位置情報を各指定移動軸方向位置について求めるピーク検出工程(S12)と、該各ピーク点の位置情報に基づきテーブル12の実際の移動方向を表わす実直線情報を求める誤差情報取得工程(S14)と、該実直線情報に基づき補正用情報を求める補正用情報取得工程(S16)と、該補正用情報に基づき該センサー14よりの測定軸方向位置情報を補正する補正工程(S20)と、を備えたことを特徴とする軸間角度補正方法。
(もっと読む)
1 - 20 / 27
[ Back to top ]