
Fターム[2F069BB40]の内容
測定手段を特定しない測長装置 (16,435) | 測定対象物の種類 (1,053) | その他の特定された測定対象物の種類 (367)
Fターム[2F069BB40]に分類される特許
361 - 367 / 367
増分測定および車輪の差速の測定によるステアリングホイールの絶対角位置の決定
自動車のシャーシに対してその自動車のステアリングホイール(1)の絶対角位置θを決定するためのシステムは、ステアリングホイールの相対角位置δをインクリメンタルに測定するための装置と、同一軸に取り付けられた車輪の差速ΔV/Vを測定するための装置(2)と、期間tにおいて角位置と差速をサンプリングするための処理装置(8)を備える。前記装置は、tn瞬間毎に、差速ΔV/Vに従う絶対角位置θ(tn)の推定値θ*(tn)と、角位置θ*(tn)とδ(ti)の間の平均差変位(tn)を決定するのに適した演算手段を備える。ここでiは0からnまでの範囲の変数であり、絶対角位置θ(tn)は平均差変位(tn)と角位置δ(tn)の和である。 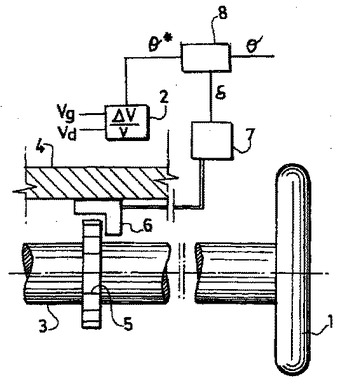 (もっと読む)
(もっと読む)
圧接端子の圧接時の幅測定方法及び装置
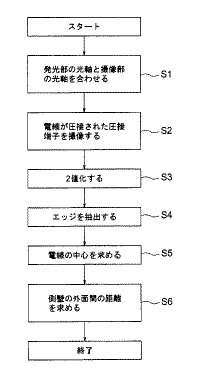
【課題】電線を圧接刃間に圧入した圧接端子の幅を正確に測定できる圧接端子の圧接時の幅測定方法及び装置を提供する。
【解決手段】圧接端子の圧接時の幅測定装置は発光する発光部と発光部からの光を受光して撮像する撮像部と発光部と撮像部との間に設けられた端子取付部を備えている。圧接端子は表面上に電線を位置付ける底壁と一対の側壁と圧接刃とを備えている。側壁は底壁の両縁から立設している。端子取付部は圧接端子を取り付ける。ステップS1で発光部の光軸と撮像部の光軸とを合わせる。ステップS2では端子取付部に取り付けられた圧接端子を撮像する。ステップS3では2値化する。ステップS4ではエッジを抽出する。ステップS5では圧接端子に圧接された電線の中心を求める。ステップS6では中心を通りかつ圧接端子の底壁に表面に沿う方向の一対の側壁の外面間の距離を求める。
(もっと読む)
距離変化出力装置及び方法

【課題】 プローブカードとテストヘッドとの距離の経時変化を検出する。
【解決手段】 ウエハプローバ1のプローブカード3と半導体集積回路試験装置のテストヘッド2との距離を検出する距離センサ6と、該距離センサ6の距離検出値を時系列的な距離データとして順次記憶するメモリ7aと、該メモリ7aに記憶された距離データを時系列順に一覧表示するディスプレイ7cとを具備する。
(もっと読む)
表面粗さ形状測定機の測定条件自動設定装置
【課題】 表面粗さ形状測定の測定条件が容易に設定できる測定条件設定装置を安価に提供する。
【解決手段】 作業者が、測定種別と算出規格を指定する入力手段21と、該当する各種パラメータが表示される表示部と、その中から必要なパラメータを指定するとそのパラメータが設定されるパラメータ設定部23と、その後ワークを測定(仮測定)すると、指定されたパラメータと測定データから算出されたパラメータ値とによってカットオフ値を自動設定するカットオフ値設定部26とを設けた。
(もっと読む)
圧接端子の拡開量の測定と良否判定
【課題】 圧接時の端子の拡開量が正確に精度よく測定できるようにする。
【解決手段】 電線50が端子40に当接する際の衝撃による幅方向の移動量をwとし、端子40の左右の側壁42R 、42L の正味の拡開量をXR 、XLとすれば、各側壁42R 、42L の変位の測定値は(XR −w)、(XL +w)となり、それらを加算した値(XR +XL )は、各側壁42R 、42L の変位を単独に測定した際に含まれる端子の移動量wが相殺された端子40全体の正味の拡開量となる。また、各側壁の正味の拡開量XR 、XL がおおよそ等しいと仮定した場合の変位量の差から端子の移動量wが求まるので、それで圧接の良否を判定することもできる。良品の場合はこの移動量wが小さいものとなる。圧接を行う前にレーザ変位センサ5R 、5L の測定目盛りの初期化を行って、端子製作上の公差を取り込まないようにして測定精度を高める。
(もっと読む)
光ファイバ担持用スペーサの溝ピッチおよび溝反転角度測定装置
【課題】 複数種のスペーサの溝ピッチと反転角度の測定を可能にすること。
【解決手段】 測定装置は、周回する螺旋溝が設けられたスペーサ12,反転する螺旋溝が設けられたスペーサ13の溝ピッチおよび溝反転角度を測定する。スペーサの進行量に対応した信号を発生させる速度パルス発生器16と、螺旋溝に嵌合された回転体18と、回転角度に対応したパルス状の回転角度信号と、回転角度信号から遅延,進行した回転方向判定信号と、螺旋溝の1回転に伴う1回転パルス信号を送出する第1,2パルス発生器19,20とを備えている。演算装置22は、スペーサの種別を選別し、螺旋溝の溝ピッチを演算するとともに、回転角度および回転方向判別信号を受けて、螺旋溝の反転位置を判別し、隣接する反転位置間での前記速度パルス発生器のパルスおよび回転角度信号を計数して、螺旋溝の溝ピッチと溝角度とを演算する。
(もっと読む)
重力ベクトル方向算定補助手段を有する位置検出装置
少なくとも一つの三次元座標系(5;24)内の本体(36)の位置と方向を検出する装置であり、この装置は、A)位置検出センサー(1);およびB)少なくとも一つの座標系(5;24;26)内で本体(36)の位置と方向を算定するために位置検出センサー(1)へ接続したコンピュータ(8)を含み、C)前記装置は重力ベクトル(19)の方向を算定する補助手段(25)を含む。重力または地球の磁場に関連した影響から生ずる欠陥に関して磁気光学X線写真(35)を修正する方法であり、この方法は以下の段階:a)重力ベクトル(19)の方向を検出する段階;b)X線器械(28)の位置と方向を算定する段階;c)重力により引き起こされたX線器械(28)の機械的変形によるX線写真(35)のゆがみを算定する段階;d)地球の局所的磁場により引き起こされたX線写真(35)の欠陥を算定する段階;e)受像機(29)に生成するX線写真(35)の光学的変形を算定する段階;およびf)コンピュータ(8)を用いて、段階c)、d)およびe)で算定された欠陥に関してデジタル化したX線写真を修正する段階を含む。 (もっと読む)
361 - 367 / 367
[ Back to top ]