
Fターム[2F069BB40]の内容
測定手段を特定しない測長装置 (16,435) | 測定対象物の種類 (1,053) | その他の特定された測定対象物の種類 (367)
Fターム[2F069BB40]に分類される特許
161 - 180 / 367
位置推定装置、位置推定方法及び位置推定プログラム
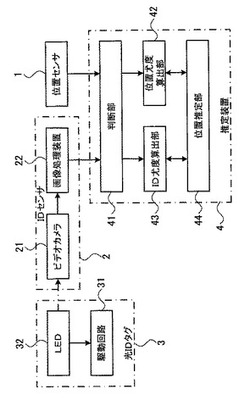
【課題】比較的低性能なセンサを用いる場合でも、複数の対象物の位置を安定して推定することができる位置推定装置を提供する。
【解決手段】 位置センサ1は、複数の人物の位置を検出し、IDセンサ2は、各人物が装着した光IDタグ3のID番号を検出し、位置尤度算出部42は、検出された位置を用いて人物の位置の尤度を算出し、ID尤度算出部43は、検出されたID番号を用いて光IDタグ3のID番号の尤度を算出し、位置推定部44は、算出された人物の位置の尤度及びID番号の尤度を基に各人物の位置を推定する。
(もっと読む)
力学量測定装置及び方法

【課題】振動や動ひずみが計測可能なワイヤレスひずみセンサにおいて、低ノイズで高精度な測定を実現しながら、同時に消費電力を低減し、バッテリ取り替え寿命の低減や、微小容量の電源での駆動を実現する。
【解決手段】ワイヤレスひずみセンサモジュールで動ひずみを測定する際に、ひずみセンサからの出力を、フィルタでフィルタリングし、整流・平滑化回路で整流・平滑化してから、CPUでデータ処理をして、無線通信を行うことにより、データ処理CPUのサンプリング周期を長くでき、また、無線通信するデータ量が小さくなるので、CPU,無線通信の消費電力を低減することができる。
(もっと読む)
帯状体の表面欠陥検査装置
【課題】帯状体表面の欠陥を、蛇行しているときにも検出できること、及び欠陥の大きさ、種類、形状も認識できること。
【解決手段】ガイドロール(4)(5)に巻装されて走行する磁気テープ(3)に対向して配設されるラインCCDカメラ(6a、6b、6c、6d、6e)と、磁気テープ(3)を照射する光照射手段(9)と、磁気テープ(3)の走行速度を検出するパルス発生器(11)と、ラインCCDカメラの撮像した画像を処理する画像処理手段(7a、7b、7c)とを具備し、画像処理手段(7a、7b、7c)は少なくとも磁気テープ(3)の一方の縁部と表面上の欠陥を認識させ、パルス発生器(11)の出力に基づく磁気テープ(3)の走行方向における欠陥の位置と、縁部から欠陥までの距離とを演算するようにした。
(もっと読む)
形態測定装置および形態測定方法
【課題】薄板を傷付けることなく且つ反りを生じることなくセットステージに載置することができると共に、セットステージへの固定および固定解除を瞬時に行うことができる形態測定装置を提供することを課題とする。
【解決手段】帯電性を有する薄板W上に形成された薄膜の形態および帯電性を有する薄板の表面の形態のいずれかを、非接触で測定する形態測定装置1において、薄板Wをセットするセットステージ4と、セットステージ4にセットした薄板Wに非接触で臨み、薄膜の形態または薄板の表面の形態を測定する測定器6と、を備え、セットステージ4には、薄板Wを静電吸着する静電吸着機構5が組み込まれている。
(もっと読む)
スプロケットの回転角を検出する装置
【課題】スプロケットの回転角を高精度かつ省スペースで検出することができる装置を提供する。
【解決手段】スプロケット23の回転角毎に異なる態様に変化するパターン形成面27aをスプロケット23に備え、スプロケット23の回転角毎に変化するパターン形成面27aの態様を複数のフォトセンサ27dにより検知し、フォトセンサ27dによる検知信号の組み合わせに基づいて対角検出部27cによりスプロケット23の絶対回転角を検出する。
(もっと読む)
内部検査装置
【課題】管路計測や孔内計測において、管路や地盤等の内部状況を的確に把握可能な内部検査装置を提供する。
【解決手段】ピッチ角、方位角、ロール角を検出する角度検出器2と、この角度検出器2の管内又は孔内の壁面に対する踊り量を検出する非接触変位センサ3,4と、を有し、管路内又は地盤に形成された孔内に挿入され、内部を移動可能な内部検査装置1であって、該管路内又は孔内を撮影する撮影手段を先端に備える構成とする。
(もっと読む)
形状測定装置
【課題】 表面形状の計測を高精度化することができ、触針を簡易に支持することによって小型の形状測定装置を提供すること。
【解決手段】 XYステージ装置82に設けたX駆動装置50がエアスライドによって可動部52を非接触で支持しリニアモータ51a,51bによって可動部52を駆動するので、載置台82aのXY軸方向に関する運動が滑らかで高精度になる。よって、光学素子OEをXY面内で移動させる際にZ軸方向の微小変位が生じにくくなり、触針11の変位量計測を正確にすることができ、光学素子OEの表面形状の計測精度を向上させることができる。
(もっと読む)
倣いプローブの校正方法
【課題】短時間でかつ高精度に倣いプローブの校正を行う倣いプローブの校正方法を提供する。
【解決手段】半径および中心座標値が既知の真球であるマスターボール7の表面を倣い測定する測定経路として第1測定経路71と第2測定経路72とを設定する(測定経路設定工程)。次に、測定経路設定工程において設定された第1測定経路71および第2測定経路72を倣い測定する(測定工程)。測定工程における倣いプローブの検出センサの出力値を測定経路71、72上の座標値と対比して、この検出センサの出力値を補正する補正データを算出する(補正データ算出工程)。ここで、測定経路設定工程にて設定される第1測定経路71および第2測定経路72は、マスターボール7の表面において螺旋形状である。そして、2つの測定経路71、72の起点711、721は赤道上において互いに90度ずれている。
(もっと読む)
転炉排ガス処理装置のスカート位置検出器異常検知方法およびその異常検知に係るスカート位置修正制御方法
【課題】対になった位置検出器同士の平均値をそれぞれ求めて位置検出器の異常を判定すると共に異常の位置検出器を除外し適正な平均値を用いて位置修正操作を行う転炉排ガス処理装置のスカート位置検出器異常検知方法およびその異常検知に係るスカート位置修正制御方法を提供する。
【解決手段】各対となる位置検出器の信号出力から平均値1及び平均値2を第1及び第2の平均値演算器21、22により求める。検出器誤差監視手段27はこれらの平均値の差を求める。異常判別手段28はこの平均値の差がある定数以上であれば位置検出器の異常を判定する。異常と判定した場合にはオペレータが関与するスイッチ制御手段30に出力する。スイッチ制御手段30は、位置修正が必要な位置検出器に係る位置修正演算器HhnのスイッチのみONし、位置修正演算した出力を平均値演算器21又は22のいずれかに出力する。
(もっと読む)
光学素子測定用治具、並びに、光学素子の面形状測定装置及び方法
【課題】 光学素子を確実に固定することによって高精度の形状測定を可能にし、好ましくは、光学素子を表裏の両面から計測することができる光学素子測定用治具を提供すること。
【解決手段】 この光学素子測定用治具10において、3つの球面部30と、3つの当接部材50A,50B,50Cとは、光学素子OEの外縁部PAに沿って等間隔で互い違いに配置されている。この結果、球面部30と当接部材50A,50B,50Cとの干渉を防止しつつ両者を効率的に配置でき、基板20上に光学素子OEを安定した状態で固定することができる。つまり、球面部30や光学素子OEの光学面の計測を確実に行うことができ、その作業性を高めることができる。
(もっと読む)
圧電体薄膜の評価装置
【課題】測定誤差の少ない圧電体薄膜の変位量を得ることができる圧電体薄膜の評価装置を提供する。
【解決手段】圧電体薄膜31の評価装置11は、圧電体薄膜31の測定面に接触させる試料固定治具20の上方に備えられたプローブ13と、プローブ13にレーザー光34を照射する光源16と、プローブ13のたわみによって変位した反射光レーザー35を受光する位置検出素子17と、位置検出素子17によって受光した反射光レーザー35のずれ量から変位量を算出する位置検出信号処理回路18と、圧電体薄膜31を固定する試料固定治具20とを有する。圧電体薄膜31は、試料固定治具20によって、電界方向に対して交差する方向の測定面とプローブ13(探針33)とが直接接触することができる上面になるように固定される。
(もっと読む)
プレス金型の動的変形測定法及び動的変形測定システム
【課題】プレス加工に係る上型と下型の動的変形を絶対的に捉え、プレス成型品に成型不良が発生した場合の金型の修正に迅速に対応できるようにする。
【解決手段】上型7および下型8に複数の測定ポイントを設定して、その各測定ポイントに加速度センサSa,Sbを配置し、上型7と下型8の両者にプレス荷重を作用させたときの加速度センサSa,Sbの出力(加速度信号)を数値解析装置10に入力する。数値解析装置10では、加速度信号を補正回路15Aに通して加速度センサSa,Saの出力電圧変動による誤差を補正した後、その加速度信号を積分回路15Bにより積分して速度信号を生成する。又、積分回路15Bの出力を補正回路15Cに通して数値解析上の誤差を補正した後、その速度信号を積分回路15Dにより積分して変位信号を生成する。そして、その変位信号を数値化あるいはグラフ化して表示装置20に表示する。
(もっと読む)
測定装置および光学素子の評価方法
【課題】光学素子の光学面と円筒基準形状の相対位置を高精度で評価する。
【解決手段】3つの球4を有する測定用の治具2に、非球面レンズ1のレンズ第1面7およびレンズ第2面8の外周部に形成された円筒基準形状9を三次元形状測定用のプローブによって測定するための基準形状測定空間3を設ける。まず、非球面レンズ1のレンズ第1面7およびレンズ第2面8の表面形状を測定し、治具2の3つの球4を基準とした座標の点列データを得る。次いで、非球面レンズ1の円筒基準形状9を測定し、3つの球4を基準とした座標の点群データを得て、円筒基準形状9とレンズ第1面7およびレンズ第2面8の相対位置を求める。
(もっと読む)
圧電体薄膜の評価方法
【課題】測定誤差の少ない圧電体薄膜の変位量を得ることができる圧電体薄膜の評価方法を提供する。
【解決手段】圧電体薄膜31の評価方法は、まず、圧電体薄膜31を含む試料12を試料固定治具20に固定する。試料12には、圧電体薄膜31に電圧を印加するために圧電体薄膜31を挟むように、第1電極42と第2電極43とが形成されている。次に、探針33を圧電体薄膜31の電界方向に対して交差する方向にある測定面に直接接触させる。そのあと、圧電体薄膜31に電圧を印加しながら、探針33を測定領域に直接走査させることにより、圧電体薄膜31の圧電特性(第1変位量)を測定する。
(もっと読む)
回転角度測定装置
【課題】小型で測定精度の高い回転角度測定装置を提供する。
【解決手段】回転盤1に第一、第二案内溝2,3を形成して第一、第二移動体4,5を各案内溝に案内させて移動させる。第一、第二移動体4,5の回転角度を検出して両移動体の回転角度から回転盤1の絶対回転角度を演算部8で演算する。
(もっと読む)
回転角検出装置
【課題】簡易な構成でありながらも、360°を超える範囲の回転角の検出にも適用可能な回転角検出装置を提供する。
【解決手段】ステアリングシャフトSにウォームホイール10を外嵌しておき、このウォームホイール10、ウォームギア11および案内ねじ軸12により、ステアリングシャフトSの回転に応じてウォームギア11を直動させる送りねじ機構を構成した。そして、ウォームギア11をその軸心方向から挟み込む態様で2つのカンチレバー13,14を設けた。また、これらカンチレバー13,14に歪みゲージ素子16,17をそれぞれ貼着した。
(もっと読む)
荷重変位算出装置および荷重変位算出方法
【課題】装置構成の小型化・簡素化を可能としつつ、高い信頼性を有する荷重から変形量を算出するための変換行列を生成可能な荷重変位算出装置を提供する。
【解決手段】荷重変位算出装置1に、対象物を第一の姿勢、第二の姿勢、第三の姿勢で支持する支持手段16・20と、対象物を互いに直交する三つの軸の軸線方向および該三つの軸のいずれか一つの軸の周方向に変形させる変形手段13・14・17・22と、対象物の互いに直交する三つの軸の軸線方向の変形量および該三つの軸のいずれか一つの軸の周方向の変形量を検出する変形量検出手段23・24・25・26と、対象物の互いに直交する三つの軸の軸線方向の荷重および周方向の荷重を検出する荷重検出手段19と、対象物の変形量に係る情報および荷重に係る情報に基づいて対象物の荷重から変形量を算出するための変換行列を生成する変換行列生成手段4aと、を具備した。
(もっと読む)
駆動軸損傷診断装置
【課題】 圧延設備等の駆動軸の損傷を診断するに際して、変位センサから出力された生波形から駆動軸のクロスの剥離および摩耗の両方ともの判別を可能とした駆動軸損傷診断装置を提供する。
【解決手段】 変位センサの出力から駆動軸の損傷状態を検出する処理手段は、変位センサの出力波形に対して移動平均によるスムージングを行うスムージング手段と、スムージングされた変位センサの出力波形をFFT変換するFFT変換手段と、FFT変換で得られたスペクトルから回転同期成分を除去して逆FFTにより時間軸波形に変換する逆FFT変換手段と、逆FFT変換で得られた波形の平均値から摩耗状態を判定する摩耗判定手段と、逆FFT変換で得られた波形の振幅から剥離状態を判定する剥離判定手段とを含んでいる。
(もっと読む)
補正情報算出方法、可動ステージの制御方法、及び露光装置
【課題】計測区間及び非計測区間の全区間において可動ステージを高精度に制御する。
【解決手段】可動ステージの計測区間(L〜R)における複数の目標位置に対する該可動ステージの実位置に相当する情報を計測してそれぞれ得られる計測誤差情報に基づいて、これらを補間して補正関数を算出し、計測区間における該補正関数の端点L,Rにおける接線の傾きaL,aRをその傾きとする該端点を通る直線を、外挿部における補正関数とし、計測区間及び外挿部における補正関数に基づいて、計測区間及び外挿部における補正情報を算出する。
(もっと読む)
リソグラフィ装置およびデバイス製造方法
【課題】変位測定系を用いて基板テーブルの位置を高精度に測定する。
【解決手段】変位測定系1は、第1の方向における基板テーブル2の位置を測定するように構成された第1のxセンサ4と、第2の方向における基板テーブル2の位置を測定するように構成された第2のyセンサ6とを備える。変位測定系は、さらに第2のxセンサ5を備える。第1および第2のxセンサ4、5と第1および第2のyセンサ6、7は、少なくとも一つの格子プレート3に対するセンサそれぞれの位置を測定するように構成される。変位測定系1は、基板テーブル2の位置に応じて第1および第2のxセンサ4、5と第1および第2のyセンサ6、7を選択的に使用して、三自由度で基板テーブル2の位置を決定するように構成される。
(もっと読む)
161 - 180 / 367
[ Back to top ]