
Fターム[2F069BB40]の内容
測定手段を特定しない測長装置 (16,435) | 測定対象物の種類 (1,053) | その他の特定された測定対象物の種類 (367)
Fターム[2F069BB40]に分類される特許
141 - 160 / 367
ステージシステム及びステージシステムの補正方法
【課題】ステージの左右の歪みを短時間で補正する。
【解決手段】互いに平行となるように離間配置し、移動体2の対向する面に配された一対のガイド軸22,32と、ガイド軸22,32のうち一方のガイド軸22に設けられ移動体2の一側部2aを一方のガイド軸22に沿って移動させる第1の搬送機構20と、ガイド軸22,32のうち他方のガイド軸32に設けられ移動体2の他側部2bを他方のガイド軸32に沿って移動させる第2の搬送機構30と、移動体2の一側部2aを一方のガイド軸22に沿って基準位置まで移動させたとき、移動体2の他側部2bの所定位置からのずれ量を検出する検出部40とを備える。
(もっと読む)
角度検出装置及び方法

【課題】測距センサの精度に関係なくスクリーンの傾斜角度を良好な精度で求めることが可能な角度検出装置及び方法を提供する。
【解決手段】画像を投射する投影装置とスクリーン間の距離を測定する1つの測距センサを備え、該測距センサを回転させて測距センサの検出方向を複数の方向へ指向させる。そして、測距センサから検出方向毎に得られる投影装置とスクリーン間の距離データ、及び検出方向間の角度から、投影装置の投射光軸と垂直な方向に対するスクリーンの傾斜角度を算出する。
(もっと読む)
剛体電車線凹凸測定装置
【課題】構造が簡単で、測定操作が比較的に容易であり、しかも凹凸を高精度で簡易に測定することができる剛体電車線凹凸測定装置を提供する。
【解決手段】本発明の剛体電車線凹凸測定装置は、レール2上を移動する自走式架線工作車1に固定される固定枠6と、この固定枠6に対して可動する可動枠7と、可動枠7に固定されて剛体電車線のパンタグラフ摺接面との間の変位を非接触状態で測定する計測するレーザ変位センサ10と、レーザ変位センサ10の上下振動の加速度を計測する上下加速度センサ9とからなる。
(もっと読む)
エーロフォイルブレードの計測
【課題】 エーロフォイルブレードのプロファイルを中心線の決定によって計測する。
【解決手段】 最適アルゴリズムを使用し、ブレードの両側の計測点に曲線を別々に適用する。これらの曲線の交点が前縁点を形成し、この前縁点を中心線の決定で使用する。中心線を参照してブレードのプロファイルを決定する。
(もっと読む)
位置測定装置用の伸長可能な脚部アセンブリ
座標測定機など測定機用の伸長可能な脚部アセンブリ(8;30)を記載する。伸長可能な脚部アセンブリ(8;30)は、第1の端部および第2の端部を備え、第1の端部と第2の端部の間の間隔を測定するための計測装置を備える。計測装置は、低い熱膨張係数を有する1つまたは複数の細長計測部材(44、46;76、78)を備える。伸長可能な脚部アセンブリ(8;30)は、枢動接合部によって、1つまたは複数のプラットホーム(4、6;36、38)に取り付けることができる。好ましい一実施形態において、荷重支持構造(50、56)は、脚部アセンブリ(8;30)の計測構造(76、78、80)から機械的に隔離される。 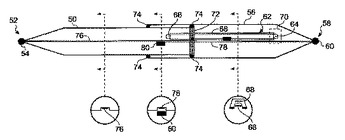 (もっと読む)
(もっと読む)
溝面形状測定装置および溝面形状測定方法およびプログラム
【課題】溝部の内部の溝幅や溝面の平面度等の溝面形状を容易かつ精度良く測定する。
【解決手段】溝面形状測定装置は、第1変位計12aとスロットダイの一方の対向面とが対向配置された状態にて、スロットダイを駆動装置により所定移動方向に移動させ、第1変位計12aと一方の対向面との間の距離を検出する。次に、変位計固定部材および各変位計の位置は不変とし、第2変位計12bとスロットダイの一方の対向面とが対向配置されるように、スロットダイを反転移動させ、スロットダイを駆動装置により所定移動方向に移動させ、第2変位計12bと一方の対向面との間の距離を検出する。検出した2つの距離から駆動装置の駆動に係る真直度誤差を相殺し、所定移動方向に対する真直度を得る。
(もっと読む)
内燃機関のクランク角度検出装置
【課題】欠け歯部の誤検出を防止し、クランク角度の基準位置を正確に特定することを可能とする。
【解決手段】一部に欠け歯部を形成する等間隔に配設された被検出部を有するクランク角検出用信号板121、該信号板121の外周に所定角度離して配設され、被検出部が通過する毎に、それぞれ第1信号SGT1と第2信号SGT2を発生する第1信号発生手段122と第2信号発生手段123、第1信号と第2信号の状態から欠け歯部を検出して基準クランク位置を特定する基準クランク位置特定手段、クランク軸の回転方向を判定するクランク軸正回転判定手段を備え、被検出部の等間隔部の角度の1/2を基準被検出部間角度とし、前記所定角度を、基準被検出部間角度より大きく且つ整数倍以外に設定すると共に、クランク軸正回転判定手段が正回転と判定している時のみ基準クランク位置を特定するようにしたもの。
(もっと読む)
三次元形状測定装置
【課題】大型の揚水ポンプや遠心圧縮機,往復圧縮機の内部に設ける羽根車を、安全かつ速やかに自動三次元測定する三次元形状測定装置を提供する。
【解決手段】羽根車の測定に際し、測定対象物の設計データたる三次元CADデータから、最適なスキャンパス情報を作成し、そのスキャンパス情報に基づき、アーム型三次元測定機の測定機手先部を三次元移動させる測定機取り付け部と、取得した表面形状情報を座標点群として順次記憶する制御端末とからなる。
制御端末内に設けた仮想空間内で、測定対象物を含めた実際の三次元測定にかかる構成機器から、装置の挙動をシミュレートし、最適なスキャンパス情報を作成する。スキャンパス情報は、中継ポイントと呼ばれる測定機取り付け部の三次元移動経路点と、その経路点間における測定機手先部の姿勢に関する情報からなる。
(もっと読む)
多数のセグメントからなる物理的構造の寸法の不変性を組立の間に確保するための方法
本発明は、多数のセグメントからなる物理的構造、特に航空機構造の寸法の不変性を組立の間に確保するための方法に関する。この方法は、以下の工程を有する。後に組み立てられる物理構造を収める空間的に固定された3次元の座標系(90)が構成され、組み立てられる前記物理構造の複数のセグメント(31,32,33)が前記空間的に固定された3次元の座標系(90)に導入され、前記空間的に固定された3次元の座標系(90)内での個々の前記セグメント(31,32,33)の位置及び既に組み立てられたセグメント(31,32,33)のグループの位置が組立の間に繰り返し記録され、そして、セグメント(31,32,33)の夫々の位置又は既に組み立てられたセグメント(31,32,33)のグループの夫々の位置が、所望の寸法の不変性に従って夫々の所定の公称値によって予め決定された許容誤差幅の外にあることを夫々の記録が示すならば、セグメント(31,32,33)の夫々の位置又は既に組み立てられたセグメント(31,32,33)のグループの夫々の位置が修正される。 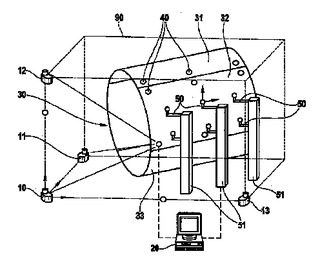 (もっと読む)
(もっと読む)
画像形成装置用部品の表面粗さ評価方法及び評価システム並びに切削加工方法及び切削加工システム
【課題】電子写真感光体用基体等の画像形成装置用部品の表面粗さの測定において、測定対象面の局所的な変化や変異を感度良くかつ正確に把握可能にする。
【解決手段】電子写真感光体用基体等の画像形成装置用部品の表面の状態について、JIS B0601に定める断面曲線が求められ、その断面曲線上の等間隔位置における表面粗さ方向の位置データー列のウェーブレット変換等の多重解像度解析が行われ、その結果に基づいて表面粗さの状態が評価される。
(もっと読む)
3次元形状測定方法および3次元形状測定装置
【課題】製品の3次元的内外面形状を測定し、測定したデータから設計、製造に必要なCADデータを作成し、製品を再現化する3次元形状測定方法および3次元形状測定装置を提供する。
【解決手段】本発明に係る3次元形状測定方法は、対象物の表面形状および内部形状のそれぞれを撮像し(St−1、St−2)、撮像した内部形状を点群データに変換し、変換した点群データを基準マーカを基点に重ね合わせて合成する内部形状合成工程(St−3)と、撮像した表面形状を点群データに変換し、変換した点群データを基準マーカを基点に重ね合わせて合成する表面形状合成工程(St−4)と、前記内部形状合成工程(St−3)で作成した内部形状合成点群データと前記表面形状合成工程(St−4)で作成した表面形状合成点群データとを合成して一体化する内部表面データ合成工程(St−5)と、この内部表面データ合成工程(St−5)で作成したデータをCADデータに変換する3次元形状変換工程(St−6)とを備える。
(もっと読む)
視線方向判定装置
【課題】運転者の顔の向きを精度よく判定可能な視線方向判定装置を提供すること。
【解決手段】シート3,5、6の着座者の視線方向を判定する視線方向判定装置1において、着座者の頭部とヘッドレスト5との間の頭部距離を検出する頭部距離検出手段30と、頭部距離検出手段30により検出された頭部距離に基づき着座者の視線方向を判定する視線方向判定手段20と、を有することを特徴とする。
(もっと読む)
アレイ形状金型の製造方法、走査加工装置
【課題】アレイ形状金型の個々のアレイ要素のピッチ誤差や形状誤差を最小にし、高精度で加工する。
【解決手段】アレイ形状金型210となるワーク200に対する複数のアレイ要素211の加工において、最初に配列中央の一つのアレイ要素211を加工して、アレイ形状金型210の全体に対する偏心誤差および理想形状からの形状誤差を計測し、当該偏心誤差および形状誤差が許容値以下になるように加工データを修正し、その後、修正された加工データによって他の全てのアレイ要素211を加工する。これにより個々のアレイ要素211の形状誤差は許容値内に収まり、配列ピッチの誤差は、加工機の位置決め精度の水準で維持され、高精度のアレイ要素211を有するアレイ形状金型210を製作することができる。
(もっと読む)
面形状測定装置およびその方法
【課題】短時間で精密に3次元形状を測定する面形状測定装置およびその方法を提供すること。
【解決手段】本発明の面形状測定装置1は,対象点の第1軸方向位置を測定するとともに,測定箇所を第1軸方向と交差する面内で走査して測定対象物の形状を測定するものであって,測定対象領域内における重点測定領域を記憶する記憶部と,対象点の第1軸方向位置の測定を,重点測定領域内では第1水準の測定点密度で行い,重点測定領域外では第1水準より低い第2水準の測定点密度で行うように,測定箇所の走査を制御する制御部とを有する。
(もっと読む)
管状体の振れ測定方法及びその装置
【課題】回転する管状体の振れをより正確かつ迅速に測定できる測定方法とその装置を提供すること。
【解決手段】回転可能な管端チャックへ管状体の内側面を押圧する状態で当該管状体の一端部を保持させ、管端チャックにより前記管状体を回転させながら、管状体の他端部内の計測位置から管状体の内周までの距離を計測して回転角度毎の計測値を得るとともに、管状体の外周から離れた測定位置から管状体の外周までの距離を測定して回転角度毎の測定値を得、前記計測値に演算処理を施すことにより管状体の他端部の内径中心を算出して当該管状体の仮想中心軸を求め、前記測定位置において管端チャックの回転軸線と直交する面における前記回転軸線に対する前記仮想中心軸の偏倚量により前記測定値を補正する手段を含む。
(もっと読む)
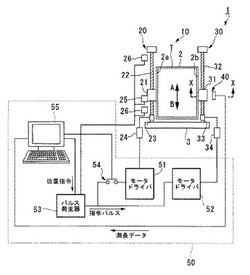
バッチリアクター内の基板ホルダのアライメントを決定するためのセンシングシステム及び方法
【課題】均一なガスフローパターンにより均一な堆積フィルムを生じる半導体処理システムを提供する。
【解決手段】 半導体基板を処理するために、リモートコントロールされ、基板ホルダのスロット内に挿入されたセンサシステム100が、リアクター等のバッチリアクター内において、ウェハボート等の基板ホルダのアライメントを測定するために用いられる。センサシステム100は、コントローラと通信するためのトランシーバと、プロセスチャンバ外部のデータ収集ユニットとを備える。さらに、センサシステム100は、センサからプロセスチャンバの壁まで距離を測定するための距離センサ120を備える。センサは、プロセスチャンバの周囲360°に渡る範囲の測定を得るために回転される。プロセスチャンバ内の基板ホルダのアライメントは、回転角と、測定された距離又は距離センサ120によって受信された信号との関係に基づいて決定される。
(もっと読む)
位置検出装置、自律移動装置、位置検出方法および位置検出プログラム
【課題】音源物体の検出成功率を向上させるとともに安定させること。
【解決手段】ロボット装置100において、画像入力部112によって入力された画像と、音源情報の適用視覚情報とに基づいて画像処理手順を実行して音源物体102の視覚特徴を検出し、音源物体102の少なくとも方位を示す視覚定位情報を出力する視覚特徴検出定位部114と、音声入力部113によって入力された音声と、音源情報の適用聴覚情報とに基づいて音声処理手順を実行して音源物体102の聴覚特徴を検出し、音源物体102の少なくとも方位を示す聴覚定位情報を出力する聴覚特徴検出定位部115と、検出戦略情報に基づいて、視覚特徴検出定位部114または聴覚特徴検出定位部115を制御し視覚定位情報または聴覚定位情報から音源物体102の存在する位置を検出する音源物体検出部116とを備えた。
(もっと読む)
車両のシートスライド装置
【課題】位置検出手段による検出部がレールの外部にあると、誤検出を生じる場合がある。
【解決手段】上部が開口する略コ字形状に屈曲形成され車両のフロアに固定されたロアレール1の前記開口部に、下部が開口する略コ字形状に屈曲形成されシートに固定されたアッパレール2がスライド自在に嵌挿され、ロアレール1のロックプレート10に対してアッパレール2を固定するロック機構6が設けられ、アッパレール2の位置を検出する近接センサ30がアッパレール2に設けられる一方、ロックプレート10には近接センサ30により検出される被検出面10dが設けられている。そして、近接センサ30の反検出面側を当接させることにより検出面30bと被検出面10dとの検出距離aを必然的に設定させる距離設定部10cがロックプレート10に一体成形されている。
(もっと読む)
顔モデル作成システム
【課題】顔形状の特徴点からなるモデルを自動生成する。
【解決手段】正準化処理部112は、レンジファインダ100が取得したモデル化対象の顔(対象顔)の距離画像を、姿勢及び位置を正しく合わせる。2次元DPマッチング部114は、この距離画像と、標準顔パッチモデル距離画像122との画素同士の対応関係を、2次元DPマッチングにより求める。この対応関係に基づき、モデル変形部116が、標準顔パッチモデル126の各特徴点を対象顔の形状に合わせて移動させることで、標準顔パッチモデル126を変形して対象顔のパッチモデルを生成する。
(もっと読む)
トロリ線支持点位置検出方法及び検出システム
【課題】トロリ線の支持点位置を正確に且つ簡単に検出できる手段を提供する。
【解決手段】検測車が収集する各種検測データが入力される入力部と、入力部から送られる各種データ及び所要のパラメータファイルに基づきトロリ線の支持点位置検出処理を行う処理部と、処理部の演算結果に基づき支持点位置を出力する出力部とを備える検出システムを構築する。トロリ線偏位の検測値変化曲線Kにおいて支持点位置を含む検出範囲Rを設定し、検出範囲Rの始端側の検測値変化曲線K上の点Sと終端側の点Tとを結ぶ補完直線Lを求める。検測値変化曲線Kと補完直線Lとの軌道中心線Cに対し垂直な方向の距離DPを算出し、この値DPが最大値DUとなる距離程を求める。検測値変化曲線Kは支持点位置で頂点Uを形成するから、距離DPが最大値DUとなる位置の距離程XUとして支持点位置の距離程が求められる。
(もっと読む)
141 - 160 / 367
[ Back to top ]