
Fターム[2F069BB40]の内容
測定手段を特定しない測長装置 (16,435) | 測定対象物の種類 (1,053) | その他の特定された測定対象物の種類 (367)
Fターム[2F069BB40]に分類される特許
61 - 80 / 367
光学素子設計製造支援システム
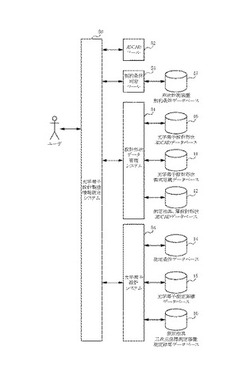
【課題】 光学素子製造において、光学素子製品の低コスト、短納期を実現可能とする光学素子設計製造支援システム、および光学素子計測システムを提供する。
【解決手段】 光学有効面設計形状を定義する数式情報を記録したデータと、光学素子全体形状を記録した3DCADデータと、光学素子形状計測に用いる測定治具、雇設計形状を記録した3DCADデータを関連付けて一元管理する。本発明による光学素子設計製造支援システムは、これら設計情報のデータ管理システムと、光学素子や測定治具、雇設計時に実施する設計制約条件自動判定演算手段と、判定結果に基づいた設計製造ワークフロー制御機能を備える。これより、人手が介在することによるデータ処理ミス、および設計制約条件に起因した再設計や再測定といった製造工程の戻りが解消可能となる。
(もっと読む)
センシング方法

【課題】低コストでフレームの所定箇所の位置を求めることができるセンシング方法を提供すること。
【解決手段】センシング方法は、自動二輪車のフレーム10の測定点の位置を求める方法である。このセンシング方法は、測定装置60により、フレーム10の後方側から、このフレーム10の測定点の全てをセンシングする。この発明によれば、1台の測定装置60でフレーム10をセンシングできるから、システムを小型化でき、低コストとなる。
(もっと読む)
目標物の位置の時間変化計測方法及び計測装置
【課題】 画像処理によりマークの位置を検出する方法は、処理に時間を要するため、高周波の位置変動を捉えることができない。
【解決手段】 (a)移動する目標物を撮像すると共に、該目標物の加速度を測定する。(b)前記目標物を撮像して得られた画像データに基づいて、該画像データが取得された時刻における該目標物の位置を求める。(c)前記目標物の加速度に基づいて得られる位置情報と、前記画像データが取得された時刻における該目標物の位置とに基づいて、該目標物の位置の時間変化を求める。
(もっと読む)
姿勢検出装置の補正パラメーター作成方法、姿勢検出装置の補正パラメーター作成用装置及び姿勢検出装置
【課題】センサーの取付角誤差に起因する検出値の誤差を補正するための補正パラメーターをより低コストで作成可能な姿勢検出装置の補正パラメーター作成方法、補正パラメーター作成用装置及び補正機能付きの姿勢検出装置を提供すること。
【解決手段】回転板230を上面231が水平になるように設置し(S10)、立方体治具210の面211に、X軸(第1の軸)が面212(第2の面)に垂直になり、Y軸(第2の軸)が面213(第3の面)に垂直になり、Z軸(第3の軸)が面211(第1の面)に垂直になるように、姿勢検出装置1を固定する(S12)。そして、立方体治具の面212、213、211と対向する各面を回転板の上面に順次固定し(S14、S20、S26)、回転板を静止又は所定の角速度で回転させて姿勢検出装置の検出値を取得し(S16、S18、S22、S24、S28、S30)、補正パラメーターを作成する(S32)。
(もっと読む)
コイルのテレスコープ量算出方法
【課題】金属板コイルのコイルエンドのタング形状部の測定によるテレスコープ量の誤認をなくする。
【解決手段】金属板コイルの端面に沿って距離計を走査させ、距離計とコイル端面間の距離を測定し、コイル内径両端の各最内巻金属板同士の測定距離の差を求め、この測定距離の差が一定のしきい値を超えるコイルは、金属板のコイルエンドのタング形状部の測定であると判定し、その測定値を除外してテレスコープ量を算出する。
(もっと読む)
ガラス条の反り測定方法およびガラス条の製造方法
【課題】母材ガラス板を加熱延伸しながらガラス条の反りを測定できるガラス条の反りの測定方法およびこれを用いたガラス条の製造方法を提供すること。
【解決手段】加熱延伸装置を用いて母材ガラス板を加熱延伸しながら、該延伸して形成したガラス条の幅方向の中心および両端部近傍を含む少なくとも3点において該ガラス条の表面および裏面の相対位置を検出し、該検出した相対位置に基づいて前記ガラス条の反りを測定する。好ましくは、前記ガラス条に向かって光を照射し、該ガラス条の表面および裏面からの前記光の反射光を測定することによって、前記相対位置を検出する。
(もっと読む)
凹凸検出位置呈示装置および凹凸検出位置呈示方法
【課題】 簡単な構成で凹凸が検出された位置を的確に呈示することができる凹凸検出位置呈示装置および凹凸検出位置呈示方法を提供することを目的とする。
【解決手段】 本発明の凹凸検出位置呈示装置は、物体の表面との相対移動により変形を生じることで該物体の表面の凹凸を検出する複数の検出部を有するシート状検出部材と、該シート状検出部材の片面側に位置し複数の発光体を有するシート状呈示部材と、からなる検出呈示本体と、前記シート状検出部材の検出結果に応じて前記発光体を発光させる演算部と、を有する。
(もっと読む)
一軸コンバインドプラント及びこの一軸コンバインドプラントの起動方法
【課題】本発明は、クラッチ嵌合時の2つの軸の軸ずれを測定する軸ずれ測定装置及びこの軸ずれ測定装置を備えた一軸コンバインドプラントを提供することを目的とする。
【解決手段】制御装置10において、ガスタービン3の軸3aと蒸気タービン5の軸5aとの軸ずれ量を測定し、測定した軸ずれ量に応じて蒸気タービン5の回転速度の昇速率及びヒートソーク時間を設定し、クラッチ7が軸3a,5aを結合するときの軸ずれ量が許容範囲内に収まるようにする。
(もっと読む)
スパイラル鋼管の製造方法および形状測定装置
【課題】スパイラル鋼管の製造工程において、鋼帯の成形・溶接後の鋼管の形状をオンラインで計測可能であるとともに、現状の設備を活用し極力簡単な設備改造で計測可能なスパイラル鋼管の製造方法および形状測定装置を提供する。
【解決手段】このスパイラル鋼管の形状測定装置は、鋼帯2を内面ローラー4および外面ローラー4を備える成形装置3を用いて管状に成形した後、鋼帯2の幅方向端面突合せ部をサブマージアーク溶接して鋼管7にするスパイラル鋼管の製造方法の溶接工程に用いられるスパイラル鋼管の形状測定装置であって、内面ローラー4を支持するマンドレル1の先端部に設けられて鋼管7の内面までの距離を非接触で測定する距離計17と、距離計17を鋼管7の周方向に回転させるモータ15と、距離計17の回転角を計測する回転角計測手段とを備えている。
(もっと読む)
非真円形穴加工方法および非真円形穴加工装置
【課題】高速かつ高精度でワークを加工できる非真円形穴加工方法を提供すること。
【解決手段】非真円形穴加工方法は、シリンダブロックに既に形成された断面非真円形状のボアと同一形状のボアを、シリンダブロックに形成する。すなわち、既に形成されたボア軸線上に複数の測定点を設定し、これら複数の測定点それぞれでのボアの内径形状を測定して、内径形状データとして取得する内径形状データ取得工程と、内径形状データを周波数解析し、0次からn次(nは自然数)までの周波数成分の振幅値および位相値を分析内径形状パラメータとして算出する分析内径形状パラメータ算出工程と、前記内径形状パラメータを、加工装置の電子記憶媒体に記憶させる分析内径形状パラメータ記憶工程と、を備える。
(もっと読む)
薄肉部位検出方法及び薄肉部位検出装置
【課題】比較用のデータをあらかじめ準備しておくことなく、薄肉部位の検出が可能な薄肉部位検出方法及び薄肉部位検出装置を提供することを課題とする。
【解決手段】本発明は、壁部表面において厚さが一定の部位naと厚さが不明な部位とに測定点mpがそれぞれ指定され、加熱時及び前記自然冷却時のうち少なくとも一方において測定点毎に温度が時系列に測定され、測定点mp毎の時間と対応した温度データの温度データ群が取得される。この取得された厚さが一定の部位naに指定された測定点spにおける基準データ群と、厚さが不明な部位に指定された測定点cpにおける比較データ群との類似度が導出されこの類似度に基づいて基準データ群が取得された測定点spでの壁部に対する比較データ群が取得された測定点cpでの壁部の薄さの度合いが導出されることで薄肉部位taが検出されることを特徴とする。
(もっと読む)
モーショントラッカ装置
【課題】光学マーカーに識別情報を持たせたり、1個1個順番に点灯させたりすることなく、各光学マーカーを確実に識別することができるモーショントラッカ装置を提供する。
【解決手段】 モーショントラッカ装置1であって、対象物10に作用する対象物角速度を短時間で検出する対象物角速度検出センサ4と、対象物10に作用する対象物加速度を短時間で検出する対象物加速度検出センサ5と、第一座標系の角度移動量を算出する第一座標系角度移動量算出部23と、第一座標系の位置移動量を算出する第一座標系位置移動量算出部27と、光学マーカー位置情報、第一座標系の角度移動量及び第一座標系の位置移動量に基づいて、光学マーカーの予想移動位置を推定する光学マーカー推定部26とを備え、光学マーカー位置情報算出部24は、光学マーカーの予想移動位置に基づいて、3個以上の光学マーカー7をそれぞれ識別することを特徴とする。
(もっと読む)
圧力測定装置及び厚み測定装置
【課題】 平板状の被測定物に生じる体積変化の分布を測定可能な装置を提供する。
【解決手段】 圧力測定装置10は、平板状の被測定物を表裏面から挟持する一対の固定部材2,12と、固定部材12の内側面に設けられているとともに、被測定物と固定部材12の間に生じる圧力分布を検出する圧力センサ8を備えている。圧力測定装置10は、被測定物と固定部材12の間に生じる圧力分布を検出することにより、被測定物に生じた体積変化の分布を測定することができる。
(もっと読む)
形状評価装置、形状評価方法および形状評価プログラム
【課題】非球面形状の数式フィッティングとアライメント補正との両方の最適解を容易に得ること。
【解決手段】本発明は、軸対称非球面形状を設計形状とした被評価非球面形状の座標データを測定する測定部10と、測定部10によって測定して得た座標データから非球面式の各係数を求め、当該係数による非球面の形状について並進、回転の座標移動変換、c(曲率)、k(コーニック係数)の係数変更の少なくともひとつを実施し、設計形状との形状差を算出する座標変換計算部231と、座標変換計算部231によって算出される形状差が最小となる並進、回転、c、kの値を非線形最小二乗法によって求める非線形最小二乗計算部232と、非線形最小二乗計算部で並進、回転、c、kの値の少なくともひとつを変更するたびに、形状差が最小となるA(非球面係数)を線形最小二乗法によって算出する線形最小二乗計算部233とを有する形状評価装置である。
(もっと読む)
情報処理システム、位置情報検出装置、位置情報管理装置、情報処理方法及びプログラム
【課題】長時間に亘って高精度に測定対象の位置検出を可能とする位置情報検出システムを提供する。
【解決手段】位置情報管理システム1は、絶対座標系での基準位置からの位置を示す位置情報を第1の測定条件又は当該第1の測定条件よりも測定精度が高い第2の測定条件で検出する第1の位置情報検出部と、無線通信により通信する送受信部26とを有する複数の位置情報検出装置10乃至位置情報検出装置14と、送受信部26と無線通信により通信する送受信部34と、送受信部34を介して、第1の位置情報検出部の測定精度を測定開始から測定終了までは第2の測定条件に切り替える制御部32とを有する位置情報管理装置20とを備える。
(もっと読む)
ユークリッド対称性認識システム、方法及びプログラム
【課題】対象物品の計測メッシュからユークリッド対称性認識を行うユークリッド対称性認識システムを提供する。
【解決手段】本発明は、計測メッシュに対してメッシュ各頂点の主曲率を計算し、メッシュ各頂点の主曲率を用いて、平面領域の境界近傍にある頂点集合を特徴領域として抽出し、特徴領域群から形状が一致するシード特徴領域ペアを抽出し、ICP法とRegion Growing法により同一の変換パラメータでマッピング可能な頂点ペアを逐次的に各シード特徴領域に追加することで特徴領域ペアを拡大し、互いにユークリッド対称な領域ペアとそれらの変換パラメータを抽出し、ユークリッド対称な領域ペアから平面反射、回転若しくは平行移動で表現できる領域ペアを見出し、当該領域ペアと共に対称性を表現するシステムを特徴とする。
(もっと読む)
損傷監視センサー及び損傷監視方法
【課題】電気回路及び計測装置等を必要とすることなく、腐食、き裂、エロージョン・コロージョン等による監視対象機器の実際の損傷状態を直接的に監視することができ、監視対象機器の安全性を確保することのできる損傷監視センサー及び損傷監視方法を提供する。
【解決手段】損傷監視センサー3は、内部が試薬収容部4bとされた胴体4と、試薬収容部4b内に収容され、流体又は流体に含まれる物質と反応して変色、発光の少なくとも一方を呈する試薬5と、胴体4の頂部に設けられた監視窓7と、胴体4の底部に形成された開口部4cと、開口部4cに設けられ、流体の浸入を許容するとともに試薬5を保護する保護膜6とを具備し、監視対象機器の壁部に設けられた挿入穴内に、保護膜6が挿入穴内の底部と対向するように挿入、固定される。
(もっと読む)
関節チェーンの運動を表わす情報決定のための自律的システム及び方法
本発明は、少なくとも2つの固体要素(ES1_1、ES2_1、ES1_2、ES2_2、ES3_2、ES1_3、ES2_3、ES3_3、ES4_3)、及び前記2つの要素をつないでいる少なくとも1つの関節(ART1_1、ART1_2、ART2_2、ART1_3、ART2_3、ART3_3)を備える、関節チェーン(CA_1、CA_2、CA_3)の運動を表わす情報を決定するための自律システムに関する。本システムは、前記関節チェーンの2つの異なる要素上に固定して取り付けられ、行われた測定を伝送するために適する、装置間距離を測定するための、少なくとも2つの装置(DISP1_1、DISP2_1、DISP1_2、DISP2_2、DISP3_2、DISP1_3、DISP2_3、DISP3_3、DISP4_3)を備える。さらに、本システムは、測定装置により供給された少なくとも1つの測定値に基づき、2つの測定器を隔てる少なくとも1つの距離を決定する手段と、装置間距離を測定するための前記装置により伝送された測定値に基づき、前記関節チェーンの運動を表わす情報を計算するのに適する、前記関節チェーンに取り付けられた計算手段(CALC)とを備える。 (もっと読む)
オブジェクト管理装置、携帯端末、および、オブジェクト操作方法
【課題】装置を小型化でき、短時間で効率的に作業空間を準備でき、処理内容決定処理の負荷を軽減し、ユーザが所望する処理内容をリアルタイムに決定し実行することができる、オブジェクト管理装置、携帯端末、および、オブジェクト操作方法を提供することを課題とする。
【解決手段】本発明は、画像撮影部116により携帯端末200と操作対象オブジェクトとの位置情報を取得し、取得された位置情報に基づいて、携帯端末200が特定の操作対象オブジェクトの特定領域内にある判定された場合、この操作対象オブジェクト上でユーザが携帯端末200を用いて行った所定の動作を、携帯端末200の変位検出部20にて物理量の変位として検出し、オブジェクト管理装置100へ送信し、受信した物理量の変位に基づいて、携帯端末200の表示部214上に表示された表示オブジェクトを用いて行う処理を規定する処理コマンドをリアルタイムに決定し実行する。
(もっと読む)
糸重量測定装置、およびそれを備えた糸番手測定装置。
【課題】複数の糸について連続的にかつ各糸について複数回の重量測定を連続的に行うことができる糸重量測定装置およびこの糸重量測定装置を備えた糸番手測定装置を提供する。
【解決手段】糸重量測定装置は、複数の糸を保持可能な保持装置と、保持された糸を特定する特定装置と、特定された糸を所定長さ切出し重量計へ送る切出装置と、切出された糸重量を測定する重量計とを含む。また、特定装置と切出装置と重量計とが保持装置に保持された糸に対しこの順で繰り返し動作でき、切出装置と重量計とがこの順で繰り返し動作できる。こうして、複数本の糸の重量測定と同一の糸に対する複数回の重量測定ができる。このため、測定作業者の作業負担が軽減される。
(もっと読む)
61 - 80 / 367
[ Back to top ]