
Fターム[2F069BB40]の内容
測定手段を特定しない測長装置 (16,435) | 測定対象物の種類 (1,053) | その他の特定された測定対象物の種類 (367)
Fターム[2F069BB40]に分類される特許
41 - 60 / 367
リニアモータ位置検出システム
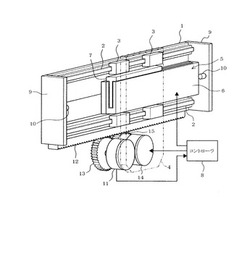
【課題】測長距離の制限を受けることがないと共にリニアモータの能力を十分に発揮させて制御時間の短縮を図ることができるリニアモータ位置検出システムを提供する。
【解決手段】リニアモータ5により移動されるテーブル4の直線運動をラック12とピニオンギア13により回転運動に変換するようにしたので、直線運動系での検出は有限目盛りであるのに対して回転運動系での検出は無限目盛りとなり、理論的には直線運動系の測長距離が無限であっても、直線運動系の測長距離を回転運動系の測長距離に容易に変換することができ、測長距離の変更に容易に対応することができる。
(もっと読む)
ケーブルの移動解析装置

【課題】ケーブルの移動力を簡易かつ短時間に求めることができるケーブルの移動解析装置を提供すること。
【解決手段】車両が上部を通過する地盤内の管路に敷設されたケーブルの水平方向の移動を解析する装置であって、車両が通過する際の地盤の振動解析を行って車両の移動に伴うケーブル近傍部分の土壌粒子の水平速度を求め、該水平速度と車両の水平方向位置との関係をもとに、車両の進行方向に向かって、車両の進行方向に速度成分を有する第1前進区間と車両の進行方向とは逆方向に速度成分を有する後進区間と再び車両の進行方向に速度成分を有する第2前進区間との各移動距離を少なくとも算出する振動解析部21と、各区間毎に、ケーブルの単位長さあたりの重量と管路に対するケーブルの摩擦係数と各区間の移動距離とを乗算した区間移動力を求め、各区間移動力をベクトル演算した値をケーブルにかかる移動力として算出する移動力解析部22と、を備える。
(もっと読む)
表面形状の測定方法
【課題】プローブを用いて、容易かつ高精度に被検物の表面形状を測定することができる表面形状の測定方法を提供する。
【解決手段】プローブと被検物とを相対移動させることにより、被検物の表面形状を測定する表面形状測定方法は、被検物の第1の領域の第1表面形状データを取得する第1取得工程と、第1表面形状データと少なくとも一部が重複する被検物の第2の領域の第2表面形状データを取得する第2取得工程と、第1表面形状データのうち、第2表面形状データと重複する領域のデータに対して、近似関数による当てはめを行って近似曲線を取得する近似曲線取得工程S20と、近似曲線を用いて第2表面形状データの補正量を算出する補正量算出工程S30と、算出された補正量に基づいて、第2表面形状データ全体を座標変換する座標変換工程S40と、第1表面形状データと、座標変換が行われた第2表面形状データとを統合する工程とを備える。
(もっと読む)
仮想対象に対する視覚的知覚位置の推定装置及び推定方法
【課題】ユーザが知覚する仮想対象の奥行位置を精度よく推定することができる推定装置を提供する。
【解決手段】ユーザが拡張現実環境に配された仮想対象に身体の部位又は器具を用いて仮想的に力を作用させる場合において、ユーザが知覚する仮想対象の奥行位置を推定する推定装置であって、前記ユーザが、前記仮想対象に対して前記部位又は器具を用いて仮想的に力を作用させるために動作させている場合に、当該動作の完了前の所定期間において、当該部位又は器具の位置、速度及び加速度のうちの少なくとも1つと時間とを計測する計測手段と、前記計測結果を所定の関数にあてはめることによって、前記部位又は器具の前記動作を表す関数を生成する生成手段と、前記生成された関数から前記部位又は器具の速度が前記作用の種類に応じて決定される値となる位置を計算し、当該計算された位置を前記ユーザが知覚する仮想対象の奥行位置として推定する推定手段を有する。
(もっと読む)
形状検査装置および形状検査方法
【課題】被検査体が所定の形状および寸法よりもわずかでも小さい場合には寸法不足を確実に検出して欠陥であると判定できる形状検査装置および形状検査方法を提供すること。
【解決手段】被検査体であるスパイダの素形材2の突起部22,23の形状を測定してその断面形状を示す「形状データ」を作成し、作成した「形状データ」からスパイダの素形材2の突起部22,23の軸線方向の全長にわたって最も外側に位置する部分の抽出することにより得られる形状を「基準形状」としてこの「基準形状」をデータ化した「基準形状データ」を作成し、「基準形状データ」と「形状データ」との差分を算出し、算出した差分に基づいてスパイダの素形材2の突起部22,23に欠陥があるかを判定する。
(もっと読む)
測定支援システム及びこれを利用した測定システム
【課題】測定値の正確性や信頼性を担保しつつ、コンピュータに入力されて処理の対象となる測定値の確定に必要な作業時間や労力を削減する。
【解決手段】 測定対象物の特性を測定する測定装置10と、測定装置10の表示部12から測定者が目視で読み取った測定値を入力するマイクロホンセット30と、測定装置10によって測定された測定値を測定者の指示したタイミングで読み取る計測部13、計測部13で読み取られた測定値を一時的に記憶する記憶部21、マイクロホンセット30から入力された測定値と記憶部21に記憶された測定値を照合する照合部23、照合の結果、マイクロホンセット30から入力された測定値と記憶部21に記憶された測定値が一致した測定値を記録する記録部24、記録部24に記録されたデーから測定結果を求めるデータ処理部40とを備えた携帯情報装置20とから測定システムを構成する。
(もっと読む)
加工仕上げ面の検査システム及び検査方法
【課題】画像から迅速にビビリマークを評価できる加工仕上げ面の検査システム及び検査方法を提供する。
【解決手段】回転工具により機械加工された加工仕上げ面の検査方法であって、前記加工仕上げ面を観察してビビリマークの有無を判断し、観察によりビビリマークが確認された場合にビビリマークの幅寸法を前記回転工具の回転軸方向で計測し、計測されたビビリマークの幅寸法がしきい値以上である場合にビビリマークの深さが許容値以上であると判定する。その結果、画像より加工仕上げ面の検査が迅速に可能となる。ビビリマークの深さが許容値よりも深い場合には表面の研磨を行い、再度加工仕上げ面の検査を実施する。
(もっと読む)
物理量検出装置、手ぶれ補正装置及びカメラ
【課題】比較的簡単な構成でありながら、重力加速度の影響が補正された物理量を検出可能な物理量検出装置、手ぶれ補正装置及びカメラを提供すること。
【解決手段】物理量検出装置1は、第1の周波数信号906を出力する第1の発振部10、第2の周波数信号908を出力する第2の発振部20、第2の発振部20に対する発振制御電圧904を生成する発振制御部50、第1、第2の周波数信号の位相差を検出して速度検出信号902を生成する速度検出部40、物理量検出信号910を生成する検出信号生成部30を含む。第1、第2の振動子の少なくとも一方は発振周波数が変化する加速度検出素子であり、発振制御部は、制御信号912に基づいて、第2の周波数信号の周波数を第1の周波数信号の周波数と一致させるように発振制御電圧を生成するか保持するかを選択し、検出信号生成部は、保持された発振制御電圧と速度検出信号に基づいて物理量検出信号を生成する。
(もっと読む)
情報処理装置及びキャリブレーション処理方法
【課題】カメラ内部パラメータやカメラ間の相対位置姿勢が変化した場合に、仮想現実空間の表示が観察者へ悪影響を及ぼすことを未然に防ぐことを可能とする。
【解決手段】
主撮像装置と副撮像装置により現実空間を撮影して得られた画像に仮想画像を合成して立体視のための画像を提供する情報処理装置は、主撮像装置の位置姿勢を計測し、保持部により保持されている装置間位置姿勢情報と計測された主撮像装置の位置姿勢とに基づいて副撮像装置の位置姿勢を算出し、計測された主撮像装置の位置姿勢と算出された副撮像装置の位置姿勢と保持されている主撮像装置及び副撮像装置の内部パラメータとを用いて、主、副撮像装置のそれぞれから得られた画像に仮想画像を合成する。情報処理装置は、主、副撮像装置により撮像された画像に基づいて、保持されている装置間位置姿勢情報や内部パラメータの情報の正当性を判断し、不当と判断した場合には保持されている情報を校正する。
(もっと読む)
磨耗状態検知システム
【課題】機械動作部を機械収容部から取り出し、若しくは潤滑油から露出させることなく、機械動作部の故障を未然に防止する磨耗状態検知システムを提供すること。
【解決手段】内部が潤滑油に含浸されたポッドに設けられ、潤滑油中で所定に動作をする少なくとも鉄分を含む機械動作部の磨耗状態を検知する磨耗状態検知システム3は、潤滑油に含まれる鉄分濃度を検知する検知ユニット40と、検知ユニット40により検知された鉄分濃度に基づき、機械動作部の磨耗状態を算出する磨耗状態算出手段50と、を備えることで、潤滑油に含浸されたポッドに設けられた機械動作部の磨耗状態が、機械動作部をポッドから取り出し、若しくは潤滑油から露出させることなく検知できるばかりか、機械動作部の不具合発生の原因となる機械動作部の磨耗状態を、不具合の発生以前に検知して不具合を未然に防止できる。
(もっと読む)
三次元形状測定方法
【課題】被測定物の三次元形状の測定精度をより一層向上させることができる三次元測定方法を提供する。
【解決手段】被測定物の表面に沿ってプローブを走査して、XY座標データを取得するとともに、光干渉計によりXY座標データに対応するA相正弦波信号値とB相正弦波信号値とを取得し、それらの信号値の位相差と2乗和平方根とを算出し、位相差に基づいてZ座標データを取得するとともに、2乗和平方根によりプローブのZ軸方向に対する傾き角度を求め、当該傾き角度からプローブと被測定物との接点の位置ズレ量を算出し、XY座標データとZ座標データと位置ズレ量とを合成して、X軸、Y軸、及びZ軸における各座標データを取得し、被測定物の三次元形状を測定する。
(もっと読む)
設備機器
【課題】 床からの寸法位置を検出し、その測定結果から所定情報を演算する演算手段を有することにより、使用者の成長に関連する情報を報知することを可能とする。
【解決手段】 本発明では、ジャッキまたはレールに取り付けられている寸法位置検出手段によって大便器の高さ位置を測定し、その結果から下肢長さ寸法を推定演算している。大便器の寸法位置検出手段において測定された高さ位置情報は、制御手段の中にある報知手段によって使用者に報知され、使用者は報知された位置情報をもとに上下手段を操作することにより、便器を最適な位置まで移動させることができ、下肢長さ寸法を推定演算することができる。
(もっと読む)
測定装置
【課題】移動しながら同一の被測定物を複数回測定したときに正しい高さ得る。
【解決手段】測定間隔算出部21は、速度センサ部13によって測定された車両1の速度測定値から、距離センサ部14が1つの被測定物100を複数回測定可能な測定時間間隔を算出し、指示部22は、算出された測定時間間隔で測定を行なうよう距離センサ部14へ指示する。判断部24は、距離センサ部14から出力された距離測定情報から、測定の対象とする被測定物と、実際に測定した被測定物100の形状が一致するか否かを判断し、形状が一致すると判断した場合、被測定物100を測定したときに連続して得られた距離測定情報の中から最小の距離を示す距離測定情報を選択し、これを正しい距離測定情報とする。地上高算出部26は、選択された距離測定情報で示される距離測定値に、距離センサ部14の測定の始点から地上までの距離を加算し、被測定物100の地上高値を算出する。
(もっと読む)
相対変位計測方法及び相対変位計測装置
【課題】蒸気発生器の伝熱管と振止部材との相対変位を計測できる相対変位計測方法を提供することにある。
【解決手段】伝熱管と振止部材との間で発生する相対変位を検出する相対変位計測方法であって、伝熱管に配置された距離測定手段により、振止部材に配置されたターゲットとの距離を測定する測定ステップと、測定ステップにより測定した間隔に基づいて、伝熱管と振止部材との相対変位を算出する算出ステップとを有し、振動時の伝熱管の所定位置と振止部材の所定位置との相対変位を計測することで上記課題を解決する。
(もっと読む)
リンクチェーンの伸びの測定方法および装置
【課題】リンクチェーンにおけるリンクの伸びを高精度に測定し、リンクごとに適切なメンテナンスを実施可能なようにして、そのリンクチェーンがフィルム延伸装置に用いられる場合には品質の優れたフィルムを安定に生産できるようにする。
【解決手段】nとmを整数として、複数のリンクが互いに連結されたリンクチェーンにおける、m個のリンクが互いに連結された基準長のリンク部分の始端部と終端部とを一対のセンサによって同じタイミングで検知できるように準備しておき、測定対象となる他のm個のリンクのうちの始端部の第n番のリンクと終端部の第n+m−1番のリンクとを一対のセンサによって検知するとともに、その検知の際に、第n番のリンクの検知タイミングと第n+m−1番のリンクの検知タイミングとの時間差を求め、この時間差とリンクチェーンの移動速度とを用いて、m個の他のリンクについての基準長からの変化量を求める。
(もっと読む)
シリンダボアの熱変形測定装置
【課題】温間での測定においてシリンダボアの壁面の温度分布の変化を低減するとともに、エンジン実働時に近い温度分布を実現させてシリンダボアの正確な熱変形を測定できるシリンダボアの熱変形測定装置を提供する。
【解決手段】シリンダボア2に挿入されるピストン状の本体20と、本体20に設けられ、ボア壁面3のシリンダボア2の径方向の位置を読み取るギャップセンサ30と、本体20をシリンダボア2の高さ方向に所定の範囲で上下動させる駆動機構と、ギャップセンサ30をボア壁面3に沿う円周方向に回転させるとともに円周方向における所定の位置で位置決めするロータ27と、ギャップセンサ30の高さ方向における位置を読み取る回転センサ等と、ギャップセンサ30の円周方向における位置を読み取るロータリエンコーダ等と、を備えた。
(もっと読む)
分注装置、自動分析装置及び分注装置のすべりねじの磨耗量検知方法
【課題】分注装置のすべりねじの経時的な磨耗量を簡易に検知することが可能な分注装置、自動分析装置及び分注装置のすべりねじの磨耗量検知方法を提供すること。
【解決手段】昇降モータ23によって駆動されるすべりねじ25と、すべりねじによって昇降されるスライダ27と、スライダの昇降位置を検知するセンサSuとを有し、水平面内の回動と、スライダの昇降とによって試薬又は検体を含む液体試料を分注する検体分注装置20、自動分析装置及び分注装置のすべりねじの磨耗量検知方法。分注装置は、スライダをセンサの近傍で昇降させ、センサによるスライダの検知と非検知との間の昇降モータの最小駆動信号量をもとにすべりねじの磨耗量を検知する制御部15を備えている。
(もっと読む)
位置検出装置、位置検出方法及びプログラム
【課題】プライバシー問題に影響されることなく計算コストを抑制しながら空間内における人の位置と向きを検出可能な位置検出装置を提供する。
【解決手段】 位置検出装置10は、空間に設置され、空間内に位置する人との距離を非接触で測定する複数の距離センサ11〜14と、複数の距離センサ11〜14から所定の時間間隔で取得される距離情報に基づき、空間内における人の位置および向きを所定の演算により検出する演算制御装置16とを含む。
(もっと読む)
エンジンマウントの変位量計測方法
【課題】高速な振動現象の下にあっても、エンジンマウントのマウント軸として配設されるボルトの中心の3軸並進量、及び、該ボルトの3軸回転量を高精度に算出することができる、エンジンマウントの変位量計測方法を提供する。
【解決手段】ボルト12の一端に配設した検出体34の3次元座標をステレオカメラ33で計測することにより、ボルト12の中心Kの位置座標O及びボルト12の姿勢角を算出するカメラ計測工程と、ボルト12の一端に配設した加速度ピックアップ31で計測したボルト12の3軸加速度を二階積分することにより、ボルト12の3軸変位量を算出する加速度検出具計測工程と、ボルト12の姿勢角に基づいてボルト12の3軸変位量をカメラ座標系における変位量に変換する変位量変換工程と、ボルト12の中心Kの位置座標Oに基づいて加速度検出具計測工程において行う二階積分の初期値を修正する座標修正工程とを備える。
(もっと読む)
リソグラフィ装置、及びリソグラフィ工程で使用するパターニングデバイス
【課題】 パターニングデバイスとパターニングデバイス支持体との間のずれが考慮されるリソグラフィ装置のパターニングデバイスに位置測定システムを提供する。
【解決手段】 本発明は、放射ビームを調整するように構成された照明システムと、放射ビームの断面にパターンを付与してパターン付放射ビームを形成することができるパターニングデバイスを支持するように構成されたパターニングデバイス支持体と、基板を保持するように構成された基板支持体と、パターン付放射ビームを基板のターゲット部分に投影するように構成された投影システムと、少なくとも基板のターゲット部分へのパターン付放射ビームの投影の間、パターニングデバイス上に提供されたグリッド又は格子を用いてパターニングデバイス支持体上に支持されたパターニングデバイスの位置量を連続して決定するように構成されたエンコーダタイプの測定システムとを含むリソグラフィ装置に関する。
(もっと読む)
41 - 60 / 367
[ Back to top ]