
Fターム[2F069BB40]の内容
測定手段を特定しない測長装置 (16,435) | 測定対象物の種類 (1,053) | その他の特定された測定対象物の種類 (367)
Fターム[2F069BB40]に分類される特許
21 - 40 / 367
位置対応値のチェック方法及び位置対応値のチェックのための監視ユニット
【課題】誤差(エラー)のある位置対応値を検出する方法及び監視ユニットを提供すること。
【解決手段】動作確認時間差の時間間隔において位置測定装置20からの位置対応値が供給される監視ユニット200により位置対応値をチェックする方法であって、移動量対応値を少なくとも2つの位置対応値及びこれらの入力時間差により算出するステップと、少なくとも2つの位置対応値に続くチェックすべき位置対応値に対する期待値を、移動量対応値及びチェックすべき位置対応値の入力までの時間から得られる位置変化量と、少なくとも2つの位置対応値とを合計して算出するステップと、期待値と最大位置差から位置期待値差を決定するステップと、チェックすべき位置対応値を位置期待値差と比較するステップと、該比較の結果を示す信号を出力するステップとを行う。
(もっと読む)
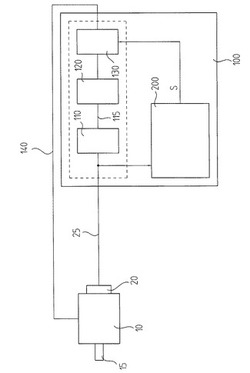
熱間長尺材の長さ測定方法および装置

【課題】熱間圧延後の長尺材がその長さ方向に搬送されつつある時に、その長さを精度良く、しかも安価に、測定することができる、熱間長尺材の長さ測定方法および装置を提供する。
【解決手段】後端センサとしてのロードセル10から搬送ライン下流側に順次所定のセンサ配置間隔で複数のアナログHMD121、122‥‥12nを配置し、最上流側のアナログHMD121を用いて先端検出用の閾値を決定し、該決定した閾値を下流側のアナログHMD122‥‥12nに設定してこれらを先端センサとして用いる。長尺材(鋼管)1の長さは、後端センサ(ロードセル)での後端検出時刻と、その直前に先端検出した先端センサ(アナログHMD)での先端検出時刻と、センサ配置間隔とから算出される。
(もっと読む)
傾斜角度推定システム、相対角度推定システム及び角速度推定システム
【課題】積分演算をデータ処理に含めず又は積分演算処理工程を最小限しか行わず、回転運動する物体の姿勢又は速度状態を推定する。
【解決手段】一の回転中心点を有し該回転中心点を軸として回転する一の物体と、該回転中心点において一の物体と接続し回転中心点を軸として回転する他の物体との間の相対的角度を推定するシステムであり、一の物体に取付けられた2以上の加速度センサからなる第1の加速度センサ群と、他の物体に取付けられた2以上の加速度センサからなる第2の加速度センサ群と、これらの群の加速度センサからの出力に基づいて物体の傾斜角を算出する演算処理ユニットからなり、第1の群の加速度センサは一の物体上で一線上に整列し、第2の群の加速度センサは一の物体上で一線上に整列し、第1の群を構成する加速度センサを結ぶ線と第2の群を構成する加速度センサを結ぶ線が共に回転中心点を通過する。
(もっと読む)
多地点測定データ取得装置および多地点測定システムおよび多地点測定データ取得方法
【課題】圃場に埋設された複数のセンサユニットの位置を設置後に収集可能な多地点測定データ取得装置および多地点測定システムおよび多地点測定データ取得方法を提供する。
【解決手段】1本の伝送路に固定された複数のセンサユニットそれぞれによって前記伝送路を介して返される応答から、前記各センサユニットが固定された位置から前記伝送路の一端までの伝送路長と前記各センサユニットの固定位置における前記伝送路の屈曲方向に関する情報とを含む情報を抽出する情報抽出部と、前記情報抽出部で抽出された情報に基づいて、前記複数のセンサユニットの配置を推定する配置推定部とを備える。
(もっと読む)
落下岩塊の大きさの推定方法及び対策工の決定方法
【課題】上端部が岩盤に保持され、且つ節理を有する柱形状の岩塊に対して、安定性の定量的な評価を適切に行う。
【解決手段】節理10によって柱形状を有する岩塊20の引張強さと密度をそれぞれ測定する。測定された引張強さと密度に基づき、下記式(1)を用いて、岩盤11から落下する岩塊20の軸方向の長さを算出する。
Le=St/(ρg・sinθ)・・・・(1)
但し、Le:岩盤11から落下する岩塊20の軸方向の長さ、St:岩塊20の引張強さ、ρ:岩塊20の密度、g:重力加速度、θ:水平方向に対する岩塊20の軸方向の傾斜角度
(もっと読む)
計測治具および配管の断面形状計測方法
【課題】配管周りのスペースが狭くても、安価な構成で、配管の軸方向に直交する断面の外径を好適に計測することができる計測治具および配管の断面形状計測方法を提供する。
【解決手段】エルボ1の軸方向に直交する断面の外径を計測する計測治具5であって、エルボ1に取付可能に構成され、エルボ1の外径よりも大径となる円形の計測枠11と、計測枠11に形成され、ダイヤルゲージ30を挿入可能に、計測枠11の径方向に貫通形成した計測穴12と、を備え、計測枠11は、真円との誤差が予め計測され、計測穴12は、計測枠11の周方向に複数設けられている。
(もっと読む)
センサを位置決めするためのシステム及び方法
【課題】互いに対して移動できる複数の障壁部を通過するセンサを位置決めするシステム及び方法を提供する。
【解決手段】内側障壁部14及び外側障壁部16を通ってセンサ12を位置決めするシステム10は、内側又は外側障壁部14、16と係合するよう構成された第1のカラー18と、折り畳み可能カップリング32と、折り畳み可能カップリング32に接続されたセンサ支持部22と、を含む。折り畳み可能カップリング32又はセンサ支持部22は、第1のカラー18とシール係合しており、第1のカラー18、折り畳み可能カップリング32、及びセンサ支持部22が通路を画成する。
(もっと読む)
変位センサシステムに適用する拡張ユニット
【課題】センサシステムを構成するアンプユニットから時系列的に得られる計測データに対して所望の解析処理を適用し、その解析結果に対応する出力を生成することが可能なセンサシステムに適用される拡張ユニットを提供すること。
【解決手段】アンプユニットに連装される拡張ユニットには、計測データ蓄積メモリと、伝送ラインを介して到来する計測データを取得して前記メモリに蓄積する計測データ取得手段と、蓄積された一連の計測データを所定のアルゴリズムに従って解析するデータ解析手段と、データ解析結果を判定する判定手段と、判定結果に対応する制御信号を外部へと出力する出力手段とを具備する。計測アルゴリズムが部品化された複数の処理プログラムが拡張ユニットに組み込まれており、パソコンからの指示に従って、処理プログラムが選択され、選択された処理プログラムが所定の順序で実行される。
(もっと読む)
鋼管の水圧試験機及び鋼管水圧試験後の管長計測方法
【課題】水圧試験機の一連の試験工程の中に検尺機能を付加することにより、次工程条件の最適化に反映させることを可能にする。
【解決手段】水圧試験時の両ヘッド部1,2の移動距離をパルスジェネレータ方式で計測可能とし、各ヘッド部に前記鋼管の管端位置を検出するためのレーザ式位置センサ41,42を設置し、鋼管3のセット前に各ヘッド部を移動させてそのレーザ式位置センサのレーザ光路を所定の原点に一致させ、その時点から、水圧試験を経て各ヘッド部を鋼管から離間させる際に各レーザ式位置センサが鋼管の管端位置を検出した時点まで、各ヘッド部の移動距離を計測し、この計測結果を用いて鋼管の管長を算出する。
(もっと読む)
枕木変位計測システム
【課題】枕木の変位量を簡単に計測でき、変位量から道床・路盤の状態を客観的に判定することができるため、軌道の保守点検作業においてより一層の効率化および信頼性の向上を図ることができる枕木変位計測システムを提供する。
【解決手段】レールを締結固定する枕木に沿った水平方向と、レールに沿った垂直方向と、これら2つの方向に直交する重力方向との三軸方向の加速度を検出する三軸加速度検出手段と、その検出結果における不要な(衝撃・定常)成分を除去するフィルタと、この不要な成分を除去されたデータに対し、積分演算を施して枕木の変位量を算出し、その変位量から必要変位波形を抽出して得た必要変位波形から最大変位量を算出する手段とを具備する変位量測定装置を設け、列車が通過する際の列車全体に対する枕木の変位波形および変位の最大値、変位に伴う三軸方向の最大加速度を計測可能とした。
(もっと読む)
情報処理装置およびその動作方法
【課題】 従来技術によると、髪の色の異なり等によって、音源(口唇)の位置を推定できない場合がある。
【解決手段】 上記課題を解決するために本発明に係る情報処理装置は、三次元の領域内に存在するオブジェクトと、基準となる面との距離を示す距離画像を取得し、前記距離画像に基づいて、前記距離が極値となる前記領域内の第1の位置を特定し、前記第1の位置から、前記オブジェクトが存在している方向に所定距離離れた第2の位置を特定し、前記第2の位置に基づいて、音源の位置を決定する。
(もっと読む)
地震スクラム方法及びその装置
【課題】原子炉建屋と隣接建屋又は原子炉建屋と周辺地盤との間に発生する相対変位を計測することにより、原子炉を自動停止し、想定を超える地震に遭遇しても原子炉を安全に停止することができる地震スクラム方法及びその装置を提供する。
【解決手段】地震スクラム方法は、原子炉建屋2とこの原子炉建屋2に隣接する建屋であるタービン建屋3との相対変位又はこの原子炉建屋2に隣接する周辺地盤2aとの相対変位を計測する相対変位計測ステップと、この計測ステップにより出力された変位データが予め定められた閾値を超えるときに原子炉を自動停止するスクラム信号を出力するスクラム信号出力ステップと、を有する。
(もっと読む)
積層鉄心の積みズレ測定方法及び測定装置並びにコンピュータプログラム
【課題】積層鉄心の積みズレ測定方法及び測定装置において、積層鉄心の積層面における積みズレの測定を高精度且つ迅速に行う。
【解決方法】積層鉄心の積みズレ測定方法は、積層方向に沿って、積層鉄心(1)の積層面のプロファイルを取得する工程と、プロファイルのうち傾きの絶対値が所定の閾値を超える領域を鉄心間の谷間であると特定する工程と、プロファイルを特定された谷間を境界としてサブプロファイルに分割する工程と、サブプロファイル毎に波形の極大値を算出する工程と、算出された極大値のうち、最大のものと最小のものとの差異を積みズレとして算出する工程とを備える。
(もっと読む)
カメラ校正装置
【課題】周囲の景色によらずカメラの撮像方向を校正することができるカメラ校正装置を提供する。
【解決手段】イメージセンサ140を有するカメラ120と、イメージセンサ140と既知の位置関係にある加速度センサ150と、イメージセンサ140が静止しているときに加速度センサ150によって検知された傾きとイメージセンサ140が移動しているときに加速度センサ150によって検知された傾きとに基づいて、カメラ120の撮像方向を算出するカメラ校正部160とを備える。
(もっと読む)
斜面安定化システム
【課題】現斜面の状況に応じて簡易な対策工を施して、斜面崩壊の発生の恐れを僅かでも少なくするとともに、斜面崩壊が発生した場合の被害を最小限にとどめることを可能にし、また、斜面崩壊の可能性が高まった時に住民が適切な対応をすることを可能にする斜面安定化システムを提供する。
【解決手段】土塊の移動に伴って抵抗力を発揮して斜面の不安定な土塊の移動の程度を小さくすることが可能な斜面安定化構造体を斜面に施工する。この場合、1.0超、1.2未満の安全率Fsにて施工する。斜面安定化構造体を構成する斜面安定化部材体に変位センサを取り付け、当該斜面の土塊が移動した時に前記変位センサが検知した信号に基づいて危険度信号を発信する危険度信号発信手段を設け、この危険度信号発信部の発信情報を受信する危険度信号受信手段を設ける。
(もっと読む)
鋼管部材の内面めっきの腐食量推定方法
【課題】極めて簡単かつ低コストで測定して、当該測定結果から定量的に腐食速度を求め、さらにn年後の腐食量を推定することができる鋼管部材の内面めっきの腐食量推定方法を提供する。
【解決手段】ある期間毎に鋼管部材全体の厚さ及び外面めっき層の厚さを測定し、これを少なくとも4〜5回行い、各回の測定時の鋼管部材全体の厚さの測定値Aから外面めっきの厚さの測定値Bを減じた値を算出してこれを算出値Cとし、第2回以降の各回の測定時に算出した算出値Cnから第1回の測定時に算出した算出値C1を減じた値が第1回の測定時に対する第2回以降の測定時の内面めっき厚の減少値でありこの絶対値Dnを第2回以降の各回の腐食量とし、これらの腐食量から腐食速度を統計的処理により算出又は推定し、n年後の腐食量を求める。
(もっと読む)
レンズ中心厚測定器およびレンズ中心厚測定方法
【課題】形状や厚みが異なる種々の被検レンズのレンズ中心厚を、被検レンズの外観品質を低下させることなく正確に測定することが容易なレンズ中心厚測定器を提供すること。
【解決手段】測距用のセンサヘッド22a,22bを有する2台の非接触型測長計2a,2bと、これら2台の非接触型測長計それぞれのセンサヘッドを互いに対向させ、各センサヘッドの測定軸MA1,MA2を互いに一致させて支持する測長計支持部3Aと、センサヘッド間に設けられ、被検レンズL1の少なくとも光学中心Lc,Ldを露出させて且つ該被検レンズの光軸Lxを測定軸に一致させて該被検レンズを保持するレンズ保持部4Aとを用いてレンズ中心厚測定器1Aを構成する。
(もっと読む)
塗装膜厚測定装置
【課題】被塗装面の領域内において、膜厚を測定するための特定位置に簡単に膜厚センサを位置づけることができる膜厚測定装置を提供する。
【解決手段】塗装膜厚測定装置10は、被塗装面に施された塗装の膜厚を測定する膜厚センサ15と、被塗装面の領域内において、膜厚センサによる測定位置を標定する距離センサ12とを備える。また、塗装膜厚測定装置10は、被塗装面の領域内に設定された特定位置を記憶する記憶部22と、記憶部22に記憶された特定位置と距離センサ12によって標定された測定位置とを比較し、両者の差分を求める比較部24と、比較部24によって求められた差分を通知する通知部20と、をさらに備えることができる。
(もっと読む)
円筒形回転装置を測定して位置合わせする方法
本発明は、例えばキルンやドラムなどの円筒形又は他の回転対称形の回転装置を測定して位置合わせするための方法に関する。測定及び位置合わせの対象となる装置は、シェルと、少なくとも1つの支持リングとを有する。本発明による方法に関して重要なのは、回転装置が作動状態で回転しているときに、回転物体のシェルの表面上測定点が、同じ円周ライン上において、各支持リングの軸線方向両側で測定されることである。測定された点から回帰円が計算され、計算された円の中心点が決定され、各支持リングの両側で計算された円の中心点の間の直線とその中心点が決定される。シェルの中心線の基準直線が計算され、決定されたシェルの中心点を、計算された基準線へ移動させることによって、物体のシェルが真直ぐになるように位置合わせされる。  (もっと読む)
(もっと読む)
フレキシブルセンサチューブ
【課題】瓦礫内探索ロボットが瓦礫に埋もれた人を発見した場合に、その位置を正確に把握することを目的とする。
【解決手段】瓦礫内探索ロボットが外部の空気コンプレッサーから空気圧チューブやCCDカメラ等の信号情報ケーブルで結ばれる必要性があることに鑑み、瓦礫内探索ロボットと外部の空気コンプレッサーとを結ぶ空気圧チューブやロボットに取り付けられたCCDカメラ等の信号情報ケーブルを多関節構造のチューブで覆い、各関節角をポテンショメータ等のセンサにより検出し、そのセンサの出力信号から多関節構造のチューブの全体形状を算出することにより、多関節構造のチューブの先端部に位置する瓦礫内探索ロボットの位置を同定する。
(もっと読む)
21 - 40 / 367
[ Back to top ]