
Fターム[2F077JJ10]の内容
感知要素の出力の伝達及び変換 (32,270) | 磁気センサを用いた変換(計数型以外) (2,055) | センサの形式 (802) | 磁電変換素子 (757) | 磁気抵抗効果素子 (303) | 分割型、磁界方向を検出するもの (45)
Fターム[2F077JJ10]に分類される特許
1 - 20 / 45
相対角度検出装置および電動パワーステアリング装置
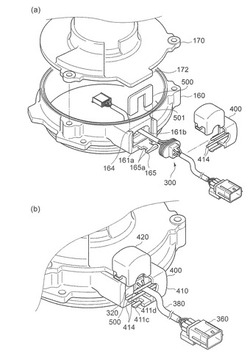
【課題】ハウジング外において電線に力が作用したとしても、ハウジング内の電線の端部に大きな力が及ばないようにする技術を提供する。
【解決手段】内外を連通する連通孔が形成されたハウジング内に収納され、互いに同軸的に配置された2つの回転軸の相対回転角度に応じた電気信号を出力する相対角度センサと、相対角度センサから出力される電気信号をハウジング外に配置されるECUに伝送する電線と、ハウジングの連通孔に嵌合されて電線を保持するグロメット320と、ハウジングの外側に配置され、互いに結合されることで電線を屈曲させた状態で把持するキャップ400と、を備える。
(もっと読む)
相対角度検出装置、電動パワーステアリング装置および電線保持具

【課題】ハウジング外において電線に力が作用したとしても、ハウジング内の電線の端部に大きな力が及ばないようにする技術を提供する。
【解決手段】内外を連通する連通孔が形成されたハウジング内に収納され、互いに同軸的に配置された2つの回転軸の相対回転角度に応じた電気信号を出力する相対角度センサと、相対角度センサから出力される電気信号をハウジング外に配置される電子制御ユニットに伝送する電線310と、ハウジングの連通孔に嵌合されるとともに、電線310を保持するグロメット320と、ハウジングの連通孔におけるグロメット320よりも外側の部位に挿入されるとともに、ハウジングに形成された連通孔の表面から凹んだ凹部に嵌り込むフックを有するソケット330と、を備える。
(もっと読む)
回転角度計測装置
【課題】回路コストを低減するため差動増幅回路やアナログ・デジタル変換回路が必要のない回路構成を有する回転角度計測装置を提供する。
【解決手段】回転軸と同期して回転する磁界発生手段が発生する磁界方向を少なくとも2以上の位相の異なる電気信号として出力するセンサ素子部211,212,221,222,231,232,241,242を有する回転角度センサ2と、センサ素子部を駆動させる周期波形を回転角度センサに出力する信号発生回路35と、センサ素子部から得られた出力が入力されるコンパレータ31,32,33,34と、コンパレータからの出力が入力される演算回路40と、を有し、演算回路は、コンパレータから出力されるパルス波形をデジタル値として取り込むパルス入力端子を有し、パルス入力端子で取り込まれた値に基づき回転軸の回転角度と等価である磁界方向を演算し出力する構成とした。
(もっと読む)
回転検出装置
【課題】アナログ回路のみの簡易な構成による回転検出装置を提供する。
【解決手段】測定対象の回転角を発生させる回転検出部100、その回転検出部100の回転角に応じてそれぞれ位相の異なる正弦波信号を出力する第1検出部及び第2検出部を備えた検出部としての磁気センサデバイス200、及び、割算部の出力と検出部の出力の線形和を出力するアナログ演算部としてのアナログ演算回路300とから回転検出装置10を構成し、回転角の一部の範囲において、その回転角に対応した線形出力を行なう。
(もっと読む)
1対の部材の相対位置を検知する方法および機構
【課題】互いに対向する1対の部材の相対位置を容易に検知して、相対位置精度を向上させるための位置合わせに利用することができる、非接触で1対の部材の相対位置を検知する方法および機構を提供する。
【解決手段】互いに対向する1対の部材1,2の相対位置を検知する方法として、一方の部材1に磁石2を取り付け、他方の部材3に検知用電気配線4a〜4dを形成し、両部材1,2を相対的に移動または回転させることによって、磁石2から加わる磁束の変化に基づいて検知用電気配線4a〜4dに誘導起電力を発生させ、検知用電気配線4a〜4dに発生した誘導起電力の大きさを検知することによって、磁石2が取り付けられた一方の部材1と、検知用電気配線4a〜4dが形成された他方の部材3の相対位置関係を求める。
(もっと読む)
インデックスセンサ
【課題】外部環境によらず、正しい回転基準位置の検出が可能なインデックスセンサを提供する。
【解決手段】回転体12の外周側の所定位置に取り付けられ径方向外方に向けて磁束を発生させる磁束発生手段13と、回転体12を臨むことができる静止系の所定位置に設置され、前記磁束を回転体12の回転軸Cに直交するY方向の磁束成分と、該Y方向の磁束成分と回転軸Cがなす面に直角なX方向の磁束成分とを独立に検出する磁気検出手段14と、磁気検出手段14が検出したY方向の磁束成分及びX方向の磁束成分から磁束の向きを演算する演算手段15と、前記磁束の向きに基づいて回転体12の所定位置が静止系の所定位置から所定回転角範囲内にあることを示す回転基準位置信号を発生させる回転基準位置信号発生手段16とを備える。
(もっと読む)
トルクインデックスセンサ
【課題】トルクセンサとインデックスセンサの機能を併せ持ち、部品点数が少なく、コンパクトなトルクインデックスセンサを提供する。
【解決手段】操舵操作によって回転する回転軸2が受けるトルクを偶数個の磁気検出素子3a,3bによって検出するトルク検出部4と、トルク検出部4の磁気検出素子3a,3bによって回転軸2の回転基準位置を検出する回転基準位置検出部5とを備え、回転基準位置検出部5は、回転軸2に伴って回転され、周囲に案内溝6が形成されたカラー7と、カラー7の回転に伴い案内溝6に案内されて磁気検出素子3a,3bに対して接近/離反するインデックス用磁石8とを備える。
(もっと読む)
操作位置検出装置
【課題】検出対象である操作位置の数よりも少ない個数の角度検出センサで操作位置を判別し、また、ユーザに良好な操作感を付与することができる操作位置検出装置を提供する。
【解決手段】シフトポジション検出装置1は、主に、第1及び第2の磁石10a、10bと、第1〜第6のMRセンサ11〜16と、制御部17と、を備える。制御部17は、第1〜第4のMRセンサ11〜14からのHi及びLowの出力と第5及び第6のMRセンサ15、16の出力Lowとの組み合わせに基づいて第1のルート51におけるポジションを判別し、第1〜第4のMRセンサ11〜14からのHi及びLowの出力と第5及び第6のMRセンサ15、16の出力Hiとの組み合わせに基づいて第3のルート53のポジションを判別する。
(もっと読む)
操作位置検出装置
【課題】検出対象である操作位置の数よりも少ない個数の磁気センサで操作位置を判別し、また、磁気センサの1つが故障しても各操作位置の検出に支障がなく、さらに、ユーザに良好な操作感を付与することができる操作位置検出装置を提供する。
【解決手段】シフトポジション検出装置1は、シフトレバー22に配置された磁石10と、磁気センサとしての第1〜第4のMRセンサ11〜14と、判別部としての制御部15と、を備えて概略構成され、第1〜第4のMRセンサ11〜14の出力の判定結果とポジションを対応させたシフトポジション情報160に基づいて各ポジションを判別する。
(もっと読む)
エンコーダ
【課題】磁場を検出する検出部によってモータの1回転内の角度検出を行うことができるエンコーダを提供する。
【解決手段】磁気パターンが形成され回転軸(R)を中心として回転し、内周側と外周側との間で径方向の磁場を形成し、回転方向の一周に亘って少なくとも一回は磁場の方向を変化させるように設けられた磁石部(6)と、磁石部による磁場を検出する検出部(4)とを備え、磁石部は、磁場の方向が変化する境界(6d)における径方向の幅(Ws)を相対的に減少させた縮幅部(6s)を有する。
(もっと読む)
多重系磁気センサのセンサパターン配置構造及びその製造方法
【課題】オフセット電圧のバラツキを低く抑えることができる磁気センサのセンサパターン配置構造及びその製造方法を提供する。
【解決手段】基板2の表面には、センサエレメントをブリッジ状(ホイートストーンブリッジ)に組んだセンサパターン10が複数(本例は10a,10bの2つ)設けられている。第1センサパターン10aは、磁気抵抗11〜14からなる。第2センサパターン10bは、磁気抵抗21〜24からなる。本例の磁気センサ1は、基板2の中心線La,Lbに対して磁気抵抗11〜14,21〜24の基準線Ka1〜Ka4,Kb1〜Kb4が全て斜めを向く配置状態に形成される。
(もっと読む)
回転角度検出装置
【課題】 磁石から発せられる磁場の角度分布を一様な方向とすることができるエリアを拡張させることによって、磁界検出部と永久磁石との芯ズレ誤差の許容範囲を拡大させることができ、さらには小型への技術展開も可能である回転角度検出装置を提供する。
【解決手段】 軸芯を中心に回転自在に支持されたシャフト(10)と、シャフトの一方の端面(11)に固着された永久磁石(20)と、永久磁石(20)と一定の間隙を空けて対向するように配置された磁界検出部(30)と、を有する回転角度検出装置であって、永久磁石は、直方体形状をなしており、磁界検出部に対向する長方形の対向面(短軸側をX方向、長軸側をY方向とする)において短軸方向(X方向)に着磁されているように構成される。
(もっと読む)
検出装置
【課題】1つの検出素子を用いて2つの直線変位を検出する。
【解決手段】入力軸191が直線変位し、入力軸191から入力部123に力が加えられた場合、可動部120が直線LAを中心とする回動動作を行う。また、入力軸192が直線変位し、入力軸192から入力部124に力が加えられた場合、可動部120が直線LBを中心とする回動動作を行う。可動部120には、可動部120とともに回動する磁石140が固着されており、基部110の基準位置には磁石140の方向を検出するセンサICが取り付けられている。センサICは、可動部120の回動動作に伴う磁石140の方向を検出し、それから、入力軸191,192の2つの直線変位を特定するための信号を生成して出力する。
(もっと読む)
回転角度検出装置
【課題】主動歯車の回転角度を理論上検出可能とされる全範囲において正確に検出することができる回転角度検出装置を提供する。
【解決手段】マイクロコンピュータは、周期数iを求めるに際して、関係式(e)が成立する場合には式(c)に基づき周期数iを算出する。関係式(f)が成立する場合には式(c)の「θab−θa」の値に最大制限値θabLimitを加算して、また関係式(g)が成立する場合には式(c)の「θab−θa」の値に最大制限値θabLimitを減算して周期数iを算出する。この算出される周期数iを式(d)に適用して絶対回転角度θrを算出する。
i=(θab−θa)/(mΩ/z)・・・(c)
θr=m(α+iΩ)/z・・・(d)
0≦θab−θa≦θabLimit・・・(e)
θab−θa<0・・・(f)
θab−θa>θabLimit・・・(g)
(もっと読む)
ポジションセンサ素子およびポジション検出装置
【課題】非接触で、安定して2次元のポジションと、2次元のポジションに略直交する方向の3方向のポジションを検出できるポジションセンサ素子およびポジション検出装置を提供する。
【解決手段】3方向のポジションを指示する操作部10と、操作部10に設けられ、傾倒操作を行う方向に対して垂直方向に磁化されたカウンター磁石20と、十字の各頂点にMRセンサ30の第1〜第4のフルブリッジが配置され、傾倒操作による磁界の方向の変化に基づいて、対向する第1及び第3のフルブリッジによる第1の出力電圧の出力と、対向する第2及び第4のフルブリッジによる第2の出力電圧の出力とから2次元のポジションを検出し、十字に配置されたフルブリッジ回路の略中心ホールセンサ40がに配置され、軸方向の操作による磁界の磁束密度の変化に基づいて、第3の出力電圧の出力から軸方向のポジションを検出する構成とする。
(もっと読む)
操作位置算出装置
【課題】1つの磁石によって3方向の操作位置を検出する操作位置算出装置を提供する。
【解決手段】レバーコントロールスイッチ装置1の判定部5は、第1のMRセンサ40の第1のハーフブリッジ回路S1の第1の出力電圧V1と第3のMRセンサ42の第5のハーフブリッジ回路S5の第5の出力電圧V5との差分値と、第1のMRセンサ40の第2のハーフブリッジ回路S2の第2の出力電圧V2と第3のMRセンサ42の第7のハーフブリッジ回路S7の第7の出力電圧V7との差分値と、から逆正接値を算出することによって、操作部17のプッシュ操作位置を算出することができる。
(もっと読む)
操作位置判定装置
【課題】簡単な構成で、正確に所定の操作位置を判定することができる操作位置判定装置を提供する。
【解決手段】操作位置判定装置1は、磁石2と、第1のハーフブリッジ回路、及び第2のハーフブリッジ回路を有する第1のMRセンサ4と、第3のハーフブリッジ回路、及び第4のハーフブリッジ回路を有する第2のMRセンサ5と、判定部6と、を備え、判定部6は、磁石2によって発生する磁界に基づいて第1のハーフブリッジ回路と第3のハーフブリッジ回路から出力される出力信号の第1の差分値と、第2のハーフブリッジ回路と第4のハーフブリッジ回路から出力される出力信号の第2の差分値とを、所定の区間に分け、その区間の組合せに基づいて操作位置を判定する。
(もっと読む)
位置検出装置およびそれに用いるコントローラ
【課題】センサヘッドのアクチュエータに対する取付作業を容易に行い得るようにする。
【解決手段】位置検出装置は、マグネットの磁力に感応して出力信号を出力する磁気センサ24が設けられたセンサヘッド20を有し、アクチュエータ本体の内部に移動自在に組み込まれたマグネット付きの移動部材の位置をアクチュエータ本体の外側で検出する。センサヘッド20には移動部材の位置に応じて点灯するLED25が設けられており、センサヘッド20にケーブルを介して接続されたコントローラ30には、磁気センサ24から出力された出力信号に基づいてLED25の点灯および消灯を制御する。
(もっと読む)
回転検出装置
【課題】磁気検出素子の温度依存性の影響を受けることなく、ロータの回転態様を高い精度で検出することのできる回転検出装置を提供する。
【解決手段】この回転検出装置は、ロータ21の回転に伴い軸線n1の周りを回転する2つの磁石22a,22bを備え、磁石22a,22bが回転するときに磁石22a,22bから発せられる磁界の変化を磁気センサ23により検出してロータ21の回転角度を検出する。ここでは、磁石22a,22bを軸線n2の方向に並設するとともに軸線n3の方向に延伸された形状とし、且つ、軸線n2に沿って異極同士が向かい合う態様にてそれぞれ着磁する。また、磁気センサ23を、2つの磁石22a,22bに挟まれる領域から軸線n1の方向にギャップgだけずれた位置に配置する。そして、磁気センサ23から出力される電圧信号から逆正接値を演算し、この逆正接値に基づいてロータ21の回転角度を検出する。
(もっと読む)
回転検出装置
【課題】磁気検出素子の温度依存性の影響を受けることなく、ロータの回転態様を高い精度で検出することのできる回転検出装置を提供する。
【解決手段】この回転検出装置は、磁気センサ23と、ロータ21の回転に伴い軸線n1の周りを回転する磁石22とを備え、磁石22が回転するときに磁石22から発せられる磁界の変化を磁気センサ23により検出してロータ21の回転角度を検出する。ここでは、磁石22を、軸線n1に平行な軸線n2を中心軸とする円柱状に形成するとともに軸線n2の方向に着磁する。また、磁気センサ23を、磁石22の中心Csの描く回転軌跡を含む円周上から軸線n1の方向にギャップgだけオフセットした位置に配置し、さらに、その検出面を、磁石22の中心Csの回転平面と平行となる態様にて配置する。そして、磁気センサ23から出力される電圧信号から逆正接値を演算し、この逆正接値に基づいてロータ21の回転角度を検出する。
(もっと読む)
1 - 20 / 45
[ Back to top ]