
Fターム[2F077QQ02]の内容
感知要素の出力の伝達及び変換 (32,270) | スケール(パルス)の読取 (1,628) | スケール又はパルス発生部材を用いるもの (1,314) | 検出器又は検出素子の配置又は配列 (1,104)
Fターム[2F077QQ02]の下位に属するFターム
2相信号を出力するもの (764)
4相信号を出力するもの (67)
上記以外の多相信号を出力するもの (116)
外部磁界の影響除去を目的とするもの (11)
出力波形の調整を目的とするもの (21)
内挿又は補間を目的とするもの (84)
Fターム[2F077QQ02]に分類される特許
1 - 20 / 41
位置検出装置
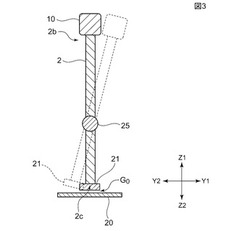
【課題】 特に、従来に比べてコストを抑えるとともに信頼性に優れた位置検出装置を提供することを目的とする。
【解決手段】 シフトレバー2と、シフトレバー2の上端部に設けられたシフトノブ10と、下端部に設けられた電極部21と、シフトレバー2を回動可能に支持する動作支点25と、電極部21と非接触にて配置された静電容量結合型センサ20と、を有する。シフトノブ10の移動操作によりシフトレバー2が回動して電極部21が前記静電容量結合型センサ20の表面を非接触を保って移動し、静電容量結合型センサ20では、電極部21の移動に伴う静電容量変化に基づいて、電極部21の位置を検出する。これによりシフトポジション情報及び各シフトポジション間の軌跡情報を取得することができる。
(もっと読む)
位置検出器用センサーロッド

【課題】位置検出感度を損なうことなく耐摩耗性及び環境遮断特性を高めた実用的な位置検出器用センサーロッドを提供する。
【解決手段】強磁性材料の母材上に導電層をリング状に形成したセンサーロッドである。導電層は、粒子積層構造を有し、ビッカース硬さHVが60以上、固有電気抵抗が15μΩcm以下、膜厚が0.1mm以上である導電性皮膜である。さらに、この導電性皮膜を含む母材の表面を導電層よりも高硬度の少なくとも一層以上からなる硬質皮膜で被覆すると共に、前記硬質皮膜の膜厚が0.3mm以下に調整されている。このような構成によれば、測定誤差が小さく耐久性の大きい位置検出器用センサーロッドが得られる。
(もっと読む)
位置検出用スケールの計測装置、位置検出用スケールの計測方法、及びスケールの製造方法
【課題】位置検出用スケールの誤差を検出する精度を向上させる。
【解決手段】位置検出用スケールの計測装置は、位置検出に使用されるスケールの位置情報を検出する複数の検出部を有し、スケールに対して移動方向に相対的に移動する位置検出部と、複数の検出部のうち少なくとも2つの検出部による検出結果に基づいて、スケールの誤差を検出する誤差検出部と、を備える。そして、複数の検出部のうち少なくとも2つの検出部は、移動方向において互いに所定の第1間隔で配置されている。
(もっと読む)
リニアセンサ
【課題】リニア方向の絶対位置を特定するスケールを直列に配置して長い距離の絶対位置を正確に検出可能で組立性にも優れたリニアセンサを提供する。
【解決手段】移動体の絶対位置を特定するために複数直列に配置された移動体絶対位置特定スケールからなる長尺スケールと、長尺スケールの何れの移動体絶対位置特定スケールに移動体が存在するかを特定する移動体存在領域識別スケールと、各移動体絶対位置特定スケールにおける移動体の絶対位置を検出する移動体絶対位置検出手段と、何れの移動体存在領域識別スケールに移動体が存在するかを特定する移動体存在領域識別手段と、を備え、長尺スケールと移動体存在領域識別スケールがそれぞれ並列に配置されており、各移動体絶対位置特定スケールの連結部付近において、移動体存在領域識別手段が移動体存在領域識別スケールを読取る位置を所定量だけずらす。
(もっと読む)
アブソリュートエンコーダ
【課題】トラック数を増やさなくても高分解能であり、かつセンサの個体差による影響を低減できるアブソリュートエンコーダを提供する。
【解決手段】アブソリュートエンコーダは、信号パターンを読み取り可能な複数のセンサを含み、複数のセンサの位置が異なるように配列されたセンサ集合体と、信号パターンを含む基体と、を含むエンコーダユニットと、センサ集合体の出力から、センサ集合体と基体との絶対位置を算出する演算装置と、を有し、センサ集合体と基体とが相対的に移動すると、複数のセンサの検知範囲を信号パターンが移動する。複数のセンサの検知範囲を信号パターンが移動することで、トラック数を多くする必要がなく、アブソリュートエンコーダの分解能を高めることができる。
(もっと読む)
変位検出装置及び変位検出装置用スケールの誤差補正方法
【課題】変位検出装置用スケールの累積変位量誤差を低減する変位検出装置を提供する。
【解決手段】変位検出装置は、複数のマークを備えたスケール115と、マーク110の位置を検出する第1の位置検出センサ111及び第2の位置検出センサ112と、第1の位置検出センサ111及び第2の位置検出センサ112からの出力信号を演算処理する処理部と409を有し、第1の位置検出センサ111及び第2の位置検出センサ112は、スケール115に対し相対移動可能であるように相対移動方向に互いに距離Lだけ離れて配置され、処理部409は、距離L、複数のマークのうちK個のマークが第1の位置検出センサ111による検出位置を通過するのに必要な第1の時間TPK、及び、第1の時間と同時に計測された、複数のマーク110のうち特定のマークが距離Lを移動するのに必要な第2の時間TLを用いてマーク110のマークピッチPの補正値P’を算出する。
(もっと読む)
位置検知装置、撮像装置および位置検知方法
【課題】信号ラインの本数を抑えつつ、位置検出に関しての分解能の低下を防止できる位置検知装置の技術を提供する。
【解決手段】撮像装置は、レンズ位置を検出するエンコーダ16Aを備えており、エンコーダ16Aは、絶対位置の情報を8ビットで表現したビット列ARが繰り返し形成される信号ライン161と、ビット列ARに対応したビット列が繰り返し形成される信号ライン162と、各信号ライン161、162から並列的にビット情報を読み出す磁気センサ部とを有している。そして、磁気センサ部により、信号ライン161において8ビット毎に絶対位置の情報が取得される検出ポイントPbに対しての相対位置の情報が第2信号ライン162の各ビット単位で取得される。その結果、エンコーダ(位置検知装置)において信号ラインの本数を抑えつつ位置検出に関しての分解能の低下を防止できる。
(もっと読む)
回転角検出装置
【課題】検出精度を高めることができる回転角検出装置を提供する。
【解決手段】第1の回転角演算部21は、第1の磁気センサ11の出力信号V1と、第2の磁気センサ12の出力信号V2とに基づいて、ロータ1の回転角に相当する第1の回転角θ1を演算する。第2の回転角演算部22は、第2の磁気センサ12の出力信号V2と、第3の磁気センサ13の出力信号V3とに基づいて、ロータ1の回転角に相当する第2の回転角θ2を演算する。回転角選択部23は、第1の回転角θ1と第2の回転角θ2とを用いて最終的な回転角θを求める。
(もっと読む)
磁気式エンコーダ
【課題】 検出信号導線パターンに重畳する誘起電圧を抑制することで、精度の良い磁気式エンコーダを提供する。
【解決手段】 回転体に取り付けられた永久磁石の磁界を検出する回転軸に対して対向する位置に取り付けられて対となる磁気検出素子の信号を取り出し、角度演算を行う検出信号処理回路を含む回路基板において磁気検出素子と信号処理部を連結する導線パターンを回転軸中心として同心円状に形成する。
(もっと読む)
角度検出センサ
【課題】検出対象の回転角度に応じて駆動モードを切り替える装置に適用されるものにおいて、簡易な処理構成で、検出対象の回転角度に対して階段状に検出電圧を出力することができる角度検出センサを提供すること。
【解決手段】回転軸と共に回転可能な磁石18と、磁石18の回転による磁束の変化に応じた信号を出力する磁気センサを有し、磁気センサから出力された信号を2値化して出力する第1、第2の検出部21、22と、第1、第2の検出部21、22から出力された2値化信号に基づいて、段階的に電圧レベルが変化された検出電圧を出力する可変抵抗回路31とを備え、第1、第2の検出部21、22は、磁石18の回転方向に沿って、磁石18の着磁ピッチ間に配置して構成した。
(もっと読む)
角度検出装置の誤差算出方法
【課題】各検出器の中心と、目盛盤の中心との間の中心誤差を算出することができる角度検出装置の誤差算出方法の提供。
【解決手段】角度検出装置1は、円盤状に形成されるとともに、中心から円周に向かって放射状に設けられる複数の目盛線を有する目盛盤11と、目盛盤11の円周に沿って配設されるとともに、径方向に対向するように配設され、目盛線を検出する2つの検出器12とを備える。そして、各検出器12による検出角度に基づいて、中心誤差δを算出する。
(もっと読む)
磁気検出装置
【課題】 特に、出力波形の安定化を図ることができるともに、略三角波の出力波形を得ることが可能な磁気検出装置を提供することを目的としている。
【解決手段】 磁気抵抗効果素子24a〜24hを搭載した磁気センサ22は、磁石21の上面(着磁面)21aの上方に位置するとともに、前記上面(着磁面)21aの幅方向の中心CLから側縁部21a1方向にずらして配置されている。これにより、相対移動する各磁気抵抗効果素子に対して無磁場状態が形成されずに、回転磁場が作用するため、安定した出力を得ることが可能になる。また、出力値をさほど低下させることなく略三角波の出力波形を得ることが可能である。さらに前記磁気抵抗効果素子を構成する固定磁性層の磁化方向を全て同一方向に固定している。よって、各磁気抵抗効果素子を同じ製造工程で製造できる等、磁気センサの製造を容易化することが可能である。
(もっと読む)
パルス生成回路
【課題】後段の処理装置でモータの回転状態を検出することが可能な、モータの回転状態を示す信号を出力することができるパルス生成回路を提供する。
【解決手段】A相パルスの変化するタイミングより後にB相パルスが変化する第1の状態と、A相パルスの変化するタイミングより前にB相パルスが変化する第2の状態との、いずれか一方の状態のときは、A相パルスが変化するタイミングを示すパルスを含む、モータの回転方向を表す信号を出力し、第1の状態、または第2の状態の、他方の状態のときは、一定の値であるモータの回転方向を表す信号を出力する。
(もっと読む)
絶対位置測長型エンコーダ
【課題】ABSパターンから生ずる信号の2値化エラーを低減し、安定で精度の高い絶対位置の計測を行う。
【解決手段】擬似ランダム符号に基づいたABSパターン104を備えると共に、該ABSパターン104で明暗パターンを形成するスケール102と、該明暗パターンを受光する受光素子112と、該受光素子112から出力される信号SA1に従うデジタル信号SA3を、輝度が高いモードBと輝度が低いモードDの2つに分け、該2つのモードの間の分散(モード間分散)が最大となるしきい値kにより2値化処理を行うと共に、該2値化処理された値から前記ABSパターン104の最小線幅PABS単位で擬似ランダム符号を復号する2値化回路124と、該復号された擬似ランダム符号と前記擬似ランダム符号の設計値との相関を取ることで前記スケール102の受光素子112に対する絶対位置を算出する位置検出回路130と、を備える。
(もっと読む)
磁気エンコーダ
【課題】小型化を維持したまま磁石体の移動方向を検出し得る磁気エンコーダを提供すること。
【解決手段】移動方向に沿ってN極とS極とからなる複数の磁極が交互に着磁された磁石体11と、磁石体11の近傍に移動方向に沿って対向配置された複数の磁気抵抗効果素子R11〜R23からなる磁気センサとを具備し、複数の磁気抵抗効果素子R11〜R23は直列接続されてその一端を電源端子T1に接続し、他端をグランド端子T2に接続する一方、該複数の磁気抵抗効果素子R11〜R23を同数ずつに分ける中点を出力端子TOとし、該中点よりも電源端子T1側の磁気抵抗素子R11〜R13と、グランド端子T2側の磁気抵抗素子R21〜R23とが、移動方向に沿って交互に配置されてなり、前記出力端子TOから出力されるパルス電圧が、前記磁石体11の移動とともに増大するか、減少するかを検出して前記磁石体11の移動方向を検知する磁気エンコーダ。
(もっと読む)
角度測定システムおよび角度測定システムを製造する方法
本発明は、第一部品グループ(1)と第二部品グループ(2)を含んでおり、第一部品グループ(1)が第二部品グループ(2)に対して相対的に、軸(A)を中心に回転自在で支承されている角度測定システムに関するものである。第一部品グループ(1)は、軌道面(1.14)と角度スケール(1.21)を備えたリング(1.1)を有している。第二部品グループ(2)は、別の軌道面(2.14)を備えた別のリング(2.1)、および角度スケール(1.21)を走査するためのセンサ(2.2)を有している。軌道面(1.14、2.14)の間に転動体(3)が配設されており、そこで角度スケール(1.21)の書き込みを、軌道面(1.14、2.14)および/または転動体(3)の回転偏差に応じて、第一範囲(U1)における角度スケール(1.21)の幾何模様が第二範囲(U2)における角度スケール(1.21)の幾何模様とは異なるように行う。 (もっと読む)
回転方向検出方法
【課題】本発明は、回転の向きが検出できる回転方向検出方法を提供することを目的とするものである。
【解決手段】本発明の回転方向検出方法は、回転部材の回転に対応して信号を出力する第1〜第4のセンサ部11a〜11dと、前記第1、第2のセンサ部11a,11bが直線状に配置されたX軸検出部8と、前記第3、第4のセンサ部11c,11dが直線状に配置されたY軸検出部9とを有する検出部を備え、前記第1のセンサ部11aで得られた信号と第2のセンサ部11bで得られた信号の位相差情報と、前記第3のセンサ部11cで得られた信号と第4のセンサ部11dで得られた信号の位相差情報をそれぞれ検出し、その後、前記それぞれの位相差情報により前記回転部材の回転方向と回転の向きを検出するようにしたものである。
(もっと読む)
位置検出装置
【課題】産業機械・自動車等の機械製品や、ジョグダイヤルなどの回転または直動位置検出装置の高精度パルス検出を1個の部品で提供すること。
【解決方法】着磁リングの発生する周方向・径方向の磁界の位相差が正確に90°であることに着目し、本発明の位置検出器は、所定の間隔をおいて配置された2個のホール素子と、前記2個のそれぞれのホール素子の感磁部上に当該感磁部を覆うように配置された保護膜と、当該保護膜上に配置され、前記2個のホール素子の前記感磁部を覆うように配置された薄膜状磁性板とを備え、さらに、2個のホール素子からの信号の和と差を生成して、位相差が正確に90°である信号を生成する処理回路を備える。これにより、回転方向の検出と、精度の良い回転角度検出を可能とする。
(もっと読む)
ロータリーエンコーダ及びその動作方法
【課題】
本発明は、軸(A)の周りを互いに相対的に回転することが可能な形に配置された二つの部品グループ(1,2)を有し、第一の部品グループ(1)がトリガーセンサー(1.1)と複数の磁場センサー(1.3,1.4)を備えたロータリーエンコーダ及びその動作方法に関する。
【解決手段】
第二の部品グループは、第一の磁石(2.1,2.4)、第二の磁石(2.2,2.5)及び第三の磁石(2.3,2.6)を備えている。部品グループ(1,2)は、1回全回転した場合に、磁場センサー(1.3,1.4)が第一の磁石(2.1,2.4)と第三の磁石(2.3,2.6)の磁場を検出することが可能なように構成されている。第二の磁石(2.2,2.5)と第三の磁石(2.3,2.6)が、トリガーセンサー(1.1)によるトリガー信号の発生を可能とする一方、第一の磁石(2.1,2.4)が、トリガーセンサー(1.1)によるトリガー信号の発生を抑制している。
(もっと読む)
磁気センサ及びそれを用いた磁気エンコーダ
【課題】 特に、簡単な構成で、出力波形の安定化を図ることができる等、検出精度を向上させることが可能な磁気センサ及びそれを用いた磁気エンコーダを提供することを目的としている。
【解決手段】 基板23の裏面に第2の永久磁石25を設け、前記基板23の表面23aに形成された全ての磁気抵抗効果素子のフリー磁性層の磁化方向33aを、固定磁性層31の磁化方向(PIN方向)と直交する方向で且つ同一方向に向ける。これにより、簡単な構成で、出力波形の安定化を図ることができる等、検出精度を向上させることが可能である。
(もっと読む)
1 - 20 / 41
[ Back to top ]