
Fターム[2F077QQ11]の内容
感知要素の出力の伝達及び変換 (32,270) | スケール(パルス)の読取 (1,628) | スケール又はパルス発生部材を用いるもの (1,314) | 原点検出用パターン又はマークを持つもの (124)
Fターム[2F077QQ11]の下位に属するFターム
複数の原点を持つもの、原点の選択 (10)
Fターム[2F077QQ11]に分類される特許
1 - 20 / 114
薄肉の検出面を有する磁気式エンコーダ
車輪回転角度検出装置
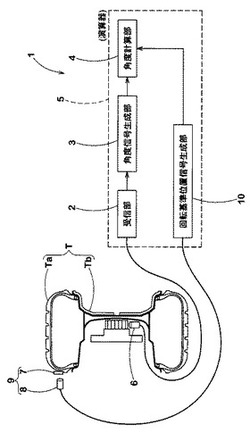
【課題】ABS信号を用いて、車輪回転角度を高精度で検出する。
【解決手段】車輪一回転につきN周期の正弦波状の波形を有するABS信号を用いて、車輪回転角度を検出する。車輪回転角度検出装置は、角度信号生成部を有する演算器を具え、該角度信号生成部は、ABS信号を時間について微分したABS微分信号を生成するステップと、ABS信号を振幅中心を閾値として2値化し、その2値化信号のエッジパルスである角度信号P1、P2を生成するステップと、前記ABS微分信号を振幅中心を閾値として2値化し、その2値化信号のエッジパルスである角度信号P3、P4を生成するステップとを行うことにより、一周期の波形毎に前記4つの角度信号P1〜P4を含む角度信号Pを生成する。
(もっと読む)
磁界角計測装置およびそれを用いた回転機

【課題】磁束発生体が高速に回転する場合であっても、磁束発生体または磁気センサの近傍に非磁性の導体(導電体)を配置した構成を用いて精度良く磁界角または回転角を計測すること。
【解決手段】磁界方向に感応する磁気センサ70と、非磁性の第1の導体240と、非磁性の第2の導体242とを備えた磁界角計測装置であって、前記磁気センサは、前記第1の導体と前記第2の導体との間に配置され、前記第1の導体中の渦電流が前記磁気センサに及ぼす磁界と、前記第2の導体中の渦電流が前記磁気センサに及ぼす磁界とが、互いに打ち消しあう構成とする。
(もっと読む)
直線運動案内機構付アクチュエータ
【課題】ハウジングの軸線方向の端部に軸の回転位置を検出するセンサを設けることができ、また軸のストローク以上にスケールが長くなるのを防止できる直線運動案内機構付アクチュエータを提供する。
【解決手段】ロータ4の、軸受14a,14bに支持される軸線方向の端部10c−2を、ハウジング2の内側から外側に向かって軸受14a,14bから軸線方向に突出させる。ハウジング2に設けられるセンサ27によって、軸受14a,14bから突出するロータ4の端部10c−2の回転位置を検出することを可能とする。
(もっと読む)
エンコーダ、アクチュエータ
【課題】センサの設置姿勢を変更したとしても、ケーブルの引き回しや取付用ブラケットの変更が不要なエンコーダを提供する。
【解決手段】エンコーダ60は、一方向に向けて所定のパターンが形成されたスケール61と、スケール61の側方に配置される原点識別部62と、スケール61及び原点識別部62に対して対向可能に配置されるセンサ本体部64と、を備え、センサ本体部64は、スケール61のパターンを読み取る第一素子66と原点識別部62を読み取る2つの第二素子67と筐体70とを有し、第一素子66が筐体70の中央に配置され、2つの第二素子67が筐体70の中央Cに対して点対称又は線対称となる位置に配置される。
(もっと読む)
回転検出器および回転検出器における回転子の製造方法
【課題】機械加工により効率よく製造できる回転子を含む回転検出器を提供する。
【解決手段】回転検出器の回転子(1b)は、1つまたは複数の段を有する第一円筒部分(10)と、1つまたは複数の段を有していて第一円筒部分に同軸で軸方向に偏倚して配置された第二円筒部分(20)とを含んでおり、第二円筒部分は、第一円筒部分よりも周方向の幅が狭い第一部分周面(21)と、第一部分周面の半径よりも小さい半径を有する第二部分周面(22)とを含んでおり、第一円筒部分のそれぞれの段に形成された複数の歯部(15)を含む第一被検出部と、第一被検出部の歯部と同位相で且つ同一の歯型寸法緒元を有していて、第二円筒部分の第一部分周面に形成された少なくとも一つの歯部(25)を含む第二被検出部とを具備し、第二円筒部分の少なくとも一つの歯部と、該少なくとも一つの歯部に対応する第一円筒部分の歯部は機械加工により一度に形成されるようにした。
(もっと読む)
回転角度計測方法、回転角度計測装置、エンジンバルブ制御方法、およびエンジンバルブ制御装置
【課題】 本発明は、ロータリエンコーダ等、回転軸が一定回転角度回転するごとにパルス信号を出力するセンサから出力されるパルス信号に基づいて回転軸の回転角度を計測する回転角度計測方法等に関し、回転軸の回転角度を高精度に計測する。
【解決手段】 回転軸の回転速度を模擬した模擬データを取得し、その模擬データに基づいて、回転軸が一定角度回転するごとに出力されるパルス信号間の時間間隔を表わす時間データを算出し、その時間データに応じた計測遅れ角度を表わす遅れ角度データを算出することにより、回転速度と計測遅れ角度との対応関係を作成しておき、実際の計測において、回転軸の回転に伴うパルス信号から回転角度を算出し、その算出された回転速度を上記の対応関係に基づいて補正する。
(もっと読む)
原点位置検出機構
【課題】本発明は、入力軸と出力軸との間に減速ギア機構を設けると共に、入力軸側と出力軸側に設けたホール素子からの各原点検出信号を用いて出力軸の原点位置を検出することを目的とする。
【解決手段】本発明による原点位置検出機構は、第1原点位置(11a)を検出した第1ホール素子(11)からの第1原点検出信号(11A)と第2原点位置(12a)を検出した前記第2ホール素子(12)からの第2原点検出信号(12A)とのAND信号(20)によって出力軸(4)の第2原点位置(12a)を検出する構成である。
(もっと読む)
回転角度検出装置
【課題】 安価で耐久性のあるレゾルバを使用しながら、絶対的な回転角度位置を認識することが可能な回転角度検出装置を提供する。
【解決手段】 回転角度検出装置は、レゾルバ14におけるロータ32の外周部に90度の角度毎に配設された4個のホールIC41、42、43、44と、ロータ32に付設された磁石37とを備える。磁石37は、ロータ32の外周部の約100度の角度範囲に至る領域に配設されている。この磁石37は、ロータ32と同期して回転し、その回転角度位置に対応して、4個のホールIC41、42、43、44のうちの1個のホールIC、または、隣接する2個のホールICが磁気を検出する。
(もっと読む)
VR型レゾルバおよび角度検出システム
【課題】軸倍角が3X以上のVR型レゾルバにおいて、角度検出の精度が高く、ゼロ点を検出することが可能で、更にゼロ点検出用の巻線を別途用意しなくてよい構成を提供する。
【解決手段】軸倍角が3XのVR型レゾルバにおいて、ロータコア104の構造をラジアル方向に突出した磁極104a,104b、ラジアル方向に突出していない磁極104cを備えた構造とする。また、突極102cと102eとに巻回されたcos検出巻線の巻回部分を繋ぐ配線の途中からゼロ点検出端子を引き出す。ゼロ点検出端子に現れる電圧波形に閾値を設けることで、ロータコア104の絶対角の検出が可能となる。
(もっと読む)
エンコーダ、駆動装置及びロボット装置
【課題】小型化が可能なエンコーダ、駆動装置及びロボット装置を提供すること。
【解決手段】光学パターンが形成された第一部材、及び、第一部材のうち光の入射面側に配置され磁気パターンが形成された第二部材、を有する移動部と、光学パターンを介した光を検出する光検出部と磁気パターンによる磁場を検出する磁場検出部とがチップ基板に実装されている位置情報検出部とを備える。
(もっと読む)
回転検出機能付き転がり軸受装置
【課題】 容易に分解できて、転がり軸受かセンサ実装基板のいずれか等の不良発生部分のみを交換し、他の部分の再利用が可能な回転検出機能付き転がり軸受装置を提供する。
【解決手段】 転がり軸受1と、センサハウジング2と、エンコーダ3と、センサ実装基板4とを備える。転がり軸受1は、軸5の外周面に接する。センサハウジング2は環状であって、軸方向の一部である軸受嵌合部21に転がり軸受1の外輪12が嵌合し、軸受嵌合部21に対し軸方向にずれた部分であるエンコーダ収容部22の内周空間にエンコーダ3が収容される。エンコーダ3は、軸5と一体回転する。センサ実装基板4は、エンコーダ3を検出するセンサ42A,42B,42Cが実装され、エンコーダ収容部21とエンコーダ3間に設けられる。
(もっと読む)
位置検出装置およびモータ駆動装置
【課題】主に、変位検出部の検出分解能を変更することなく、検出する位置情報の分解能を設定、変更することができるようにする。
【解決手段】位置検出部(エンコーダ1、ホールIC6)と、変位検出部(エンコーダ1)と、カウント部(エッジ検出部20、非整数分周器21、角度カウンタ31,32)とを備える。そして、カウント部(エッジ検出部20、非整数分周器21、角度カウンタ31,32)を、変位パルス(エンコーダパルスenca)のエッジが所定の区間エッジ数(分周比分母DEN)だけ到来する間に、区間エッジ数(分周比分母DEN)よりも小さい所定の非カウント数(分周比分母DENと分周比分子NUMとの差)だけ変位パルス(エンコーダパルスenca)のエッジをマスクしてカウントし得るように構成する。
(もっと読む)
磁気式エンコーダ
【課題】長さ寸法や角度などを測定する計測器具の用途に適した高精度・高信頼度でかつ安価な磁気式エンコーダを実現すること。
【解決手段】同一ピッチでN極とS極が交互に着磁されたテープ状磁気スケール部材を外周面に貼り付けて構成された磁気記録回転体と、磁気記録回転体に近接配置したA相、B相の磁気情報検出出力を出力する磁気情報検出手段とを有し、テープ状磁気スケール部材の両端部における出力信号の変化に基づいてZ相の信号出力が得られるようにした。また、磁気情報検出手段を適当な間隔で2個以上配設することで、磁気シート部材の貼り付け範囲の角度以上の回転角度の情報を得ることができるようにした。
(もっと読む)
位置検出方法および位置検出装置
【課題】 複数の切り欠き部を間隔を空けて回転方向に沿って連続して設けた回転体を回転させる駆動モータとして、個体差や使用条件によって回転数が変化するブラシ型のDCモータを採用して、回転体の特定位置を確実に検出することのできる、コンパクトで安価、そして安全な位置検出方法および位置検出装置を得る。
【解決手段】 複数の切り欠き部5を回転方向に沿って設けた回転体6の切り欠き部5からの検出信号をONとし、未切り欠き部分7からの検出信号をOFFとする切り欠き部検出手段8を備え、ON、OFFの検出信号に基づき、ONの検出時間とこのONに続くOFFの検出時間が一致したと判定したときを特定位置として検出する。
(もっと読む)
ロータリエンコーダ
【課題】磁気スケールと磁気センサ基板に位置ずれが発生した場合でも、磁気スケールの回転移動を精度良く検出できるロータリエンコーダを提供すること。
【解決手段】ロータリエンコーダ1は磁気センサ基板32上にA相を検出するための+a相、−a相の磁気抵抗パターンSIN+、SIN−、並びに、B相を検出するための+b相、−b相の磁気抵抗パターンCOS+、COS−を備える。磁気抵抗パターンSIN+、COS+は積層された第1積層磁気抵抗パターン351として形成され、磁気抵抗パターンSIN−、COS−は積層された第2積層磁気抵抗パターン352として形成され、磁気抵抗パターンSIN+、COS+は、+a相と+b相が最小位相差となる最小機械角度ずれた位置に配置され、磁気抵抗パターンSIN−、COS−は、−a相と−b相が最小位相差となる最小機械角度ずれた位置に配置される。
(もっと読む)
エンコーダ、サーボユニット及び位置データ算出方法
【課題】より正確な位置データを測定することができるエンコーダ、サーボユニット及び位置データ算出方法を提供すること。
【解決手段】このエンコーダ100は、検出対象の位置を表す検出信号Dを検出する検出部110と、検出信号に基づいて、離散的なサンプリングタイミングtで、検出対象の位置を表す第1ビット幅の第1位置データAを算出する第1位置データ算出部120と、第1位置データを第1ビット幅よりも長い第2ビット幅の第2位置データBに変換する第1データ変換部130と、連続した2以上のサンプリングタイミングの第2位置データBに基づいて、タイミングデータが入力されると位置データを導出する近似関数FBを算出する近似部140と、近似関数に基づいて出力タイミングにおける検出対象の位置を表す第3位置データCを算出する第3位置データ算出部150と、を有する。
(もっと読む)
バーニア式位置検出装置
【課題】位置検出の分解能を向上することができるバーニア式位置検出装置を提供する。
【解決手段】回転板3は、2枚の回転板9,10が重ね配置された形状をとる。第1回転板9の周縁に、軸4回りに沿って第1被検出突部6bを複数(3つ)設け、第2回転板10の周縁に、軸4回りに沿って第2被検出突部7bを複数(2つ)設ける。そして、第1被検出突部6bの対向位置に第1センサ部6aを配置し、第2被検出突部7bの対向位置に第2センサ部7aを配置する。第2回転板10を第1回転板9に対して基準位置から回転方向に所定角度ずらし配置する。これにより、回転板3の回転時、第1センサ部6aから割り出される符号と、第2センサ部7aから割り出される符号とが、交互に値が切り換わる。
(もっと読む)
移動体の絶対位置検出装置
【課題】電源遮断後の再復帰時に移動体が再び元の状態から移動するまでの時間を短くしつつ、移動体自体の移動距離を低コストで従来に比べてかなり長くできる移動体の絶対位置検出装置を提供する。
【解決手段】移動体の絶対位置を特定する絶対値特定パターンが記録されている絶対位置特定スケール11と、移動体の絶対位置を特定しない絶対値不特定パターンが記録されている絶対位置不特定スケール12と、移動体が絶対位置不特定スケールに対応する領域から絶対位置特定スケールに対応する領域に到達したことを検出するガイドパターンが記録されている前記絶対値不特定スケールの少なくとも一部をなすガイドスケール13と、これらのスケールに記録された各パターンを検出する検出器51と、を備えている。
(もっと読む)
容量性変位エンコーダ
【課題】容量性位置感知のための改良された装置および方法を提供する。
【解決手段】静止体に対する移動体の位置を感知するための容量性移動量エンコーダ140は、静止体に結合された少なくとも1つの静止素子141と、静止素子の近傍において移動体に結合された移動素子148とを含む。電界送信手段142が静電界を発生させ、この静電界は、両素子の相対移動に伴って両素子間に現れるキャパシタンス変化によって変調される。導電性シールド154は移動体からも静止体からも電気的に絶縁され、移動素子および静止素子を封入することによって両素子を外部の電気的干渉から保護する。処理回路138が変調された静電界を感知し、これに呼応して移動体の位置測定量を求める。
(もっと読む)
1 - 20 / 114
[ Back to top ]