
Fターム[2F077TT32]の内容
感知要素の出力の伝達及び変換 (32,270) | 信号処理回路(特性補償雑音除去を除く) (4,069) | パルス化、アナログ−デジタル変換 (802) | 2値化 (127)
Fターム[2F077TT32]に分類される特許
1 - 20 / 127
車輪回転角度検出装置
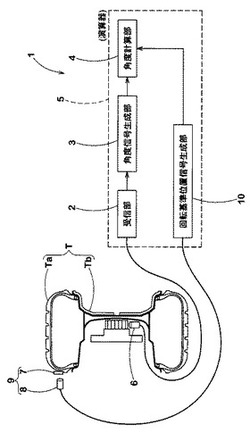
【課題】ABS信号を用いて、車輪回転角度を高精度で検出する。
【解決手段】車輪一回転につきN周期の正弦波状の波形を有するABS信号を用いて、車輪回転角度を検出する。車輪回転角度検出装置は、角度信号生成部を有する演算器を具え、該角度信号生成部は、ABS信号を時間について微分したABS微分信号を生成するステップと、ABS信号を振幅中心を閾値として2値化し、その2値化信号のエッジパルスである角度信号P1、P2を生成するステップと、前記ABS微分信号を振幅中心を閾値として2値化し、その2値化信号のエッジパルスである角度信号P3、P4を生成するステップとを行うことにより、一周期の波形毎に前記4つの角度信号P1〜P4を含む角度信号Pを生成する。
(もっと読む)
低電力磁場センサ

【課題】2つの磁界信号チャネルのサンプリングが同期し、これら2つのチャネルのサンプリング時間の差によるセンサ方向出力信号のあらゆる不正確性が除去される
【解決手段】低電力アプリケーションのための磁場センサ10は、サンプル間隔の間、検知される磁界に比例する信号を提供する磁界検知エレメント20を備えており、さらに、サンプル間隔の間、磁界信号と閾値レベルとを比較し、磁界の強度を示すセンサ出力信号を生成するコンパレータ回路30を備えている。二重サンプル速度機構によれば、最初は第1の所定のサンプル速度で磁界信号がサンプルされ、また、センサ出力信号の変化の検出に引き続く所定の間隔の間、第2のより速い所定のサンプル速度でサンプルされる。ユーザ・プログラマブル・サンプル速度機構によれば、ユーザが所定の固定サンプル速度すなわちユーザ指定サンプル速度でセンサを動作させることができる。磁場センサは、回転磁気物品の回転速度および/または回転方向を検出することができる。
(もっと読む)
回転角度計測装置
【課題】回路コストを低減するため差動増幅回路やアナログ・デジタル変換回路が必要のない回路構成を有する回転角度計測装置を提供する。
【解決手段】回転軸と同期して回転する磁界発生手段が発生する磁界方向を少なくとも2以上の位相の異なる電気信号として出力するセンサ素子部211,212,221,222,231,232,241,242を有する回転角度センサ2と、センサ素子部を駆動させる周期波形を回転角度センサに出力する信号発生回路35と、センサ素子部から得られた出力が入力されるコンパレータ31,32,33,34と、コンパレータからの出力が入力される演算回路40と、を有し、演算回路は、コンパレータから出力されるパルス波形をデジタル値として取り込むパルス入力端子を有し、パルス入力端子で取り込まれた値に基づき回転軸の回転角度と等価である磁界方向を演算し出力する構成とした。
(もっと読む)
エンコーダ、駆動装置及びロボット装置
【課題】小型化が可能なエンコーダ、駆動装置及びロボット装置を提供すること。
【解決手段】光学パターンが形成された第一部材、及び、第一部材のうち光の入射面側に配置され磁気パターンが形成された第二部材、を有する移動部と、光学パターンを介した光を検出する光検出部と磁気パターンによる磁場を検出する磁場検出部とがチップ基板に実装されている位置情報検出部とを備える。
(もっと読む)
位置情報検出センサ、位置情報検出センサの製造方法、エンコーダ、モータ装置及びロボット装置
【課題】小型化が可能な位置情報検出センサ、位置情報検出センサの製造方法、エンコーダ、モータ装置及びロボット装置を提供する。
【解決手段】光学パターンを介した光を検出する光検出部20と、磁気パターンによる磁場を検出する磁性薄膜をそれぞれ有す第1検出部31と第2検出部32からなる磁場検出部30とを備え、光検出部20と磁場検出部30とは、同一のチップ基板10に第1検出部31と第2検出部32が光検出部20を挟む位置に配置されている。
(もっと読む)
エンコーダ、駆動装置及びロボット装置
【課題】小型化が可能なエンコーダ、モータ装置及びロボット装置を提供すること。
【解決手段】磁気パターンを有する単一部材として形成され、光学パターンを有する移動部と、光学パターンを介した光を検出する光検出部と磁気パターンによる磁場を検出する磁場検出部とがチップ基板に実装されている位置情報検出部とを備える。
(もっと読む)
磁気センサ調整方法、及び、磁気センサ調整装置
【課題】磁気センサの調整が煩雑となることが抑制された磁気センサ調整方法、及び、磁気センサ調整装置を提供する。
【解決手段】磁電変換素子(20)、磁石(30)、及び、磁電変換素子(20)の出力信号を閾値電圧に基づいて二値化する信号処理部(43)を有する磁気センサ(10)の出力特性を調整する磁気センサ調整方法であって、磁性体(70)と磁気センサ(10)との距離が第1距離の時の磁電変換素子(20)の第1出力信号の電圧値Va、及び、磁性体(70)と磁気センサ(10)との距離が第2距離の時に出力される磁電変換素子(20)の第2出力信号の電圧値Vbを計測し、磁電変換素子(20)の出力特性に関わる係数をa,b、閾値電圧をVthとすると、Vth=a×ln(Vb−Va)+b+Vaが成立するように磁電変換素子(20)の出力信号の電圧レベルを調整する。
(もっと読む)
磁気式位置検出装置
【課題】磁気式位置検出装置の製造上のばらつきに対する出力信号のばらつきを低減し、容易に、安価に製造できるようにする。また、装置の特性を改善する。
【解決手段】磁気式位置検出装置80は、基板1と、磁石4と、基板1上に形成された第1から第4の磁電変換素子2a〜2dを含むブリッジ回路20と、検出回路30を備える。基板1面は磁石4の磁化方向にほぼ垂直で、第2及び第3の磁電変換素子2b、2cは、磁石4の磁化方向に沿って見て、磁石4の磁化方向に垂直でかつ磁性移動体100の移動方向に垂直な直線と平行な磁石4の磁極の中心点を通る直線上あるいはその近傍に配置され、磁性移動体100が対向していない場合に、第1及び第4の磁電変換素子2a、2dは、印加される磁界の基板1面内成分が第2及び第3の磁電変換素子2b、2cとほぼ同じであるように配置される。
(もっと読む)
回転方向検出機能付き回転数センサ
【課題】本発明は、回転数を検出することができるとともに、回転方向も検出することができる回転方向検出機能付き回転数センサを提供することを目的とするものである。
【解決手段】本発明の回転方向検出機能付き回転数センサは、第1の比較器36から得られる出力パルス信号の立ち上がりエッジ時点での第2の比較器37から出力される出力パルスレベルと、第1の比較器36から得られる出力パルス信号の立ち下がりエッジ時点での第2の比較器37から出力される出力パルスレベルとを比較する回転方向検出用比較器を設ける構成としたものである。
(もっと読む)
信号処理装置
【課題】アナログ信号に代えて矩形波信号が入力される場合の誤作動を抑制する。
【解決手段】メータ制御装置10は、センサ30からのアナログ信号、または外部の制御装置60からの矩形波信号に基づき、車速を算出し、表示器20に表示する。波形整形回路12と第1入力回路13とを含むアナログ信号入力回路には、信号伝達を停止させる停止回路16が設けられている。アナログ信号入力回路12、13の出力と、外部の制御装置60から矩形波信号を入力する第2入力回路14の出力とは、論理和ゲート回路15によって並列接続され、CPU11に入力される。センサ30からアナログ信号が入力されるときにだけメータ制御装置10に接続される他の車載制御装置40、50が検出回路17によって検出されないとき、判定手段11cと回路制御手段11dは、停止回路16をオンさせ、アナログ信号入力回路12、13を停止させる。
(もっと読む)
車載機器用二値信号処理装置
【課題】車両側から車載機器に入力される二値信号の高レベル/低レベルの電位が未知の場合であっても、前記二値信号の2つの状態を正しく弁別し、高レベル及び低レベルの状態に応じてパルス状に変化する出力側二値信号を生成する。
【解決手段】入力側二値信号SG1の波形のアナログレベルをデジタル情報に変換して入力し、このデジタル情報から第1のレベル(高レベル)と第2のレベル(低レベル)とを検出し、前記第1のレベル及び第2のレベルに基づいて少なくとも1つの閾値を決定し、前記閾値に応じて基準レベル生成部の状態を自動的に調整するマイクロコンピュータ11と、前記基準レベル生成部に配置され前記マイクロコンピュータ11からのデジタル制御入力に従って抵抗値が決定される少なくとも1つのデジタルポテンショメータ16、17とを備える。
(もっと読む)
センサ信号処理回路
【課題】2種類のセンサ信号を処理する回路を簡単化する。
【解決手段】回転体2の回転に追従して周期的に変化する第1センサ信号V1と、それと異なる位相で周期的に変化する第2センサ信号V2を処理する回路であり、兼用処理回路20と、第1保持回路10と、第2保持回路14と、第1センサ信号と兼用処理回路を接続する第1状態と、第2センサ信号と兼用処理回路を接続する第2状態の間で切り換わる第1スイッチ24a,24bと、兼用処理回路と第1保持回路を接続する第1状態と、兼用処理回路と第2保持回路を接続する第2状態の間で切り換わる第2スイッチ26a,26bと、時分割判定処理回路28を備えている。時分割判定処理回路は、第1センサ信号が低周波である間は第1スイッチと第2スイッチの両者を第1状態と第2状態の間で交互に切り換え、第1センサ信号が高周波である間は第1スイッチと第2スイッチの両者を第1状態に固定する。
(もっと読む)
位置検出装置
【課題】位置検出装置の高精度化と高速化を両立でき得る位置検出装置を提供する。
【解決手段】位置検出装置は、互いに位相が90度異なる2つの正弦波状の信号を出力する検出コイル2,3と、検出コイル2,3からの出力信号DCA,DSCに含ま
れるオフセット成分を除去する減算器8,9と、オフセット成分除去後の2つの信号DCA,DSCを位置情報IPに変換する内挿演算器12と、検出コイル2,3から
の2つの信号DC,DSの自乗和の平方根を演算する半径演算器10と、半径演算器10の出力の変動成分RDAとオフセット成分除去後の信号DCA,DSCとをそれ
ぞれ乗算する相関演算器17,18と、相関演算器17,18の出力値のDC成分を抽出する低域通過フィルタ(LPF)19,20と、当該LPF19,20の出力値
COMDC,SOMDCに基づいて、オフセット変位分を含むオフセット成分を出力する手段と、を備える。
(もっと読む)
回転位置センサ
【課題】回転角度の高い分解能を得られると同時に、小型化した回転位置センサを提供すること。
【解決手段】ロータ平板13の外周部につづら折り状の励磁コイル14が形成され、内周部にロータ側ロータリィトランス7が形成されていること、ステータ平板11の外周部に、つづら折り状のn個の検出コイル12A、12B、12C、12D(本実施の形態では、n=4)が形成され、内周部にステータ側ロータリィトランス8が形成されていること、4個の検出コイル12A、12B、12C、12Dが、重なり合わないように、円周方向に並べて配置されていること、4個の検出コイルは、各々、電気角で360度/8ずつずらして配置されていること、ステータ側ロータリィトランス8及びロータ側ロータリィトランス7を介して、励磁コイル14に高周波信号を励磁する高周波励磁回路22、21を有すること、を特徴とする。
(もっと読む)
回転検出装置
【課題】回転角度を算出することなく、回転軸が予め定めた角度に位置することを検出することができる回転検出装置を提供する。
【解決手段】シフトポジション検出装置1は、シャフト3の回転に伴って磁界の向きが変わるように配置された磁石21と、磁石21の磁界に応じて信号を出力し、シャフト3が予め定めた回転角度にあるときに出力する信号が切り替わるように配置されるMRセンサと、複数のMRセンサ200a〜200dの出力する信号が切り替わる回転角度がそれぞれ異なるようにMRセンサ200a〜200dを配置し、複数のMRセンサ200a〜200dの出力する信号の組み合わせに応じてシャフト3の角度範囲を検出するシフトポジション検出手段801とを有する。
(もっと読む)
エンコーダ校正装置
【課題】エンコーダにおいて内挿計算によって算出される内挿値に対しても高精度な校正を能率良く行えるようにする。
【解決手段】等速回転モータ(M)に連結された基準エンコーダ(E1)及び被校正エンコーダ(E2)それぞれから出力されるパルス信号(22a、22b)の時間差(δ)を測定する時間差測定回路(12)と、前記時間差に応じて被校正エンコーダの校正を行う演算処理部(18)とを備えるエンコーダ校正装置において、擬似正弦波信号をデジタル化するA/D変換器(24)を備え、演算処理部で擬似正弦波信号の完全な正弦波からの偏差に応じて被校正エンコーダの内挿計算によって算出される内挿値の校正も行う。
(もっと読む)
磁気検出装置
【課題】磁電変換素子の検出信号のシフト量によらず正確な磁性移動体の位置を検出することが可能な磁気検出装置を得る。
【解決手段】磁電変換素子からの検出信号の振幅をDC結合にて波形整形する第1の比較回路31と、磁電変換素子からの検出信号の振幅をAC結合にて波形整形する第3の比較回路33と、固有周波数を有する発振回路51と、第1の比較回路の出力を、発振器を用いてカウントする制御回路52と、第1の比較手段と第2の比較手段の出力を選択する選択回路53を備え、制御回路52は第1の比較回路31の出力矩形波の立上りから次の立上りまでもしくは立下りから次の立下りまでをカウントし、所望の値になった時点で選択回路53に出力を与え、選択回路は第1の比較回路もしくは第3の比較回路の出力矩形波を選択し、出力する磁気検出装置。
(もっと読む)
位置センサ
【課題】サーチコイルに対する励磁信号のノイズ的影響を除去することでセンサ出力のS/N比を向上させ、検出誤差を低減すること。
【解決手段】ロータリーエンコーダ1は、ステータコアと、ステータコアと隙間を介して対向しながら回転可能に設けられるロータコアと、ロータコアに設けられ、所定のピッチでジグザグに折り返された励磁コイルと、ステータコアに設けられ、励磁コイルと隙間を介して対向して配置され、所定のピッチでジグザグに折り返されたサーチコイル23と、励磁コイルに供給される励磁信号を出力する励磁信号出力回路31,32,33と、励磁信号と同位相又は逆位相の信号をサーチコイル23から出力されるサーチ信号に注入して合成する注入回路35とを備える。
(もっと読む)
センサ電圧の処理回路
【課題】センサ電圧処理回路のオフセット電圧と増幅率を短時間で調整する。
【解決手段】
センサ電圧処理回路100は、オフセット電圧を基準にしてセンサ電圧を増幅した電圧を出力するともにオフセット電圧と増幅率が調整可能な増幅回路120と、増幅回路120の出力電圧の極値を保存する極値保存回路160と、極値保存回路が保存している極値に基づいて増幅回路の出力電圧を2値化する2値化回路200と、調整回路400を備えている。調整回路400は初期化処理時に、1)増幅率を最大値に設定し、2)増幅回路の出力電圧が増幅回路の動作電圧範囲の中間帯に入るようなオフセット電圧に調整し、3)極値を中間帯内の電圧とし、4)増幅回路の出力電圧の極値からの変化幅が所定幅を超えた時に増幅率を低減するとともに極値を補正し、5)増幅回路の出力電圧が回転体の回転運動に固有な変化パターンを示すまで前記(4)の処理を繰り返す。
(もっと読む)
回転検出装置及び回転検出システム
【課題】エンコーダ等のセンサを設けることなく、直流モータの回転状態を精度良く検出できるようにすることを目的とする。
【解決手段】モータ2は、3相の各相コイルL1,L2,L3のうち第1相コイルL1と並列にコンデンサC1が接続された構成となっており、これにより、180°回転する毎にモータ回路のインピーダンスが二段階に変化する。制御部6は、モータ2をPWM制御にて駆動している。そのため、モータ2に流れる電流は、PWM制御による駆動スイッチMOSのON・OFFの切り替えに応じて脈動する。つまり、PWM制御によってモータ電流には交流成分が含まれることになる。また、回転に伴うモータ回路のインピーダンスの変化に応じて、その交流成分の振幅も変化する。そこで制御部6は、その交流成分の振幅変化に基づいて、モータ2の回転角や回転速度を検出する。
(もっと読む)
1 - 20 / 127
[ Back to top ]