
Fターム[2F077TT57]の内容
感知要素の出力の伝達及び変換 (32,270) | 信号処理回路(特性補償雑音除去を除く) (4,069) | 信号の特定位置の検出 (259)
Fターム[2F077TT57]の下位に属するFターム
Fターム[2F077TT57]に分類される特許
1 - 20 / 81
回転角信号断線検出方法及び装置
検出装置、駆動装置
【課題】小型化を図った検出装置、駆動装置を提供する。
【解決手段】モータの回転角度に応じて、それぞれの位相が異なるL個(Lは、2以上の整数)の第1正弦波信号を生成する生成手段と、前記L個の第1正弦波信号それぞれを用いた演算を行なうことにより、M個(Mは、M>Lを満たす整数)の第2正弦波信号を生成する演算手段と、前記M個の第2正弦波信号それぞれの振幅値と、予め定められた閾値とを比較し、比較結果を示すN個(Nは、N≧Mを満たす整数)の比較結果信号を生成する比較手段と、前記比較手段により生成された前記N個の比較結果信号に基づいて、前記モータの回転位置および前記モータの回転速度のうち少なくとも一方を検出するための検出信号を生成する検出手段と、を有することを特徴とする検出装置。
(もっと読む)
データム調整を伴う誘導センサ

【課題】 データム調整を伴う誘導センサを提供する。
【解決手段】 誘導位置センサは、移動可能なコア部材と、第1のセンサ巻線と、第2のセンサ巻線とを含む。第1および第2のセンサ巻線間の誘導結合はコア部材の位置を示すセンサ出力を提供する。センサは、コア部材のデータム位置を設定するための調整器を含む。調整器は、第1および第2の調整器巻線と調整部材とを含み、該調整部材は、移動可能であり、コア部材がデータム位置にあるときにセンサ出力をオフセットする調整器出力を提供するように、第1および第2の調整器巻線間の誘導結合を変化させる。
(もっと読む)
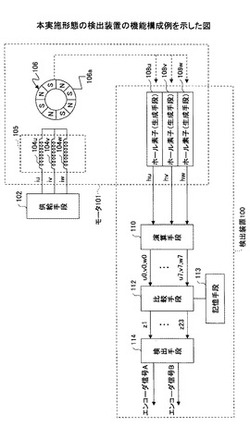
VR型レゾルバおよび角度検出システム
【課題】軸倍角が3X以上のVR型レゾルバにおいて、角度検出の精度が高く、ゼロ点を検出することが可能で、更にゼロ点検出用の巻線を別途用意しなくてよい構成を提供する。
【解決手段】軸倍角が3XのVR型レゾルバにおいて、ロータコア104の構造をラジアル方向に突出した磁極104a,104b、ラジアル方向に突出していない磁極104cを備えた構造とする。また、突極102cと102eとに巻回されたcos検出巻線の巻回部分を繋ぐ配線の途中からゼロ点検出端子を引き出す。ゼロ点検出端子に現れる電圧波形に閾値を設けることで、ロータコア104の絶対角の検出が可能となる。
(もっと読む)
回転角度計測装置
【課題】回路コストを低減するため差動増幅回路やアナログ・デジタル変換回路が必要のない回路構成を有する回転角度計測装置を提供する。
【解決手段】回転軸と同期して回転する磁界発生手段が発生する磁界方向を少なくとも2以上の位相の異なる電気信号として出力するセンサ素子部211,212,221,222,231,232,241,242を有する回転角度センサ2と、センサ素子部を駆動させる周期波形を回転角度センサに出力する信号発生回路35と、センサ素子部から得られた出力が入力されるコンパレータ31,32,33,34と、コンパレータからの出力が入力される演算回路40と、を有し、演算回路は、コンパレータから出力されるパルス波形をデジタル値として取り込むパルス入力端子を有し、パルス入力端子で取り込まれた値に基づき回転軸の回転角度と等価である磁界方向を演算し出力する構成とした。
(もっと読む)
セグメントカウンタと精密位置センサとを同期させるための方法および装置
【課題】本発明は、ウィーガンドセンサに基づくセグメントカウンタの値と精密位置センサの値とを正確に同期させるための新規なスペースおよびコストを節約した方法を提供する。また、この方法を実行するための装置を提供する。
【解決手段】ウィーガンドセンサを含むセグメントカウンタのカウント値と精密位置センサのポジション値との絶対同期化のために、セグメントカウンタのウィーガンドワイヤの最後の磁化方向を情報の一部として使用して、カウント値とポジション値とを全ポジション値へとエラー無く変換するための方法およびこの方法を実行するための装置。
(もっと読む)
動的自動利得制御機能を有するセンサインタフェースの方法及びシステム
【課題】動的自動利得制御機能を有するセンサインタフェースの方法等を提供する。
【解決手段】所与のターゲットの速度範囲全体にわたって入力信号の真の正ピーク及び負ピークが維持されるように信号調整処理を動的に調節することにより、低速時の信号対ノイズ比を高め、高速時のクリッピングや歪みを防ぐことが可能な磁気センサインタフェースを提供する。センサから交流差動電圧信号を受信するステップを含む。交流差動電圧信号の振幅は、時間とともに変化する。交流差動電圧信号は、動的スケーリングが可能な減衰済みシングルエンデッド電圧信号に変換される。減衰済みシングルエンデッド電圧信号にスケーリング係数を乗じることにより、減衰済みシングルエンデッド電圧信号をスケーリングすることが可能である。スケーリング係数は、スケーリングされた減衰済みシングルエンデッド電圧信号の信号対ノイズ比を最大化するように選択される。
(もっと読む)
変位量検出装置
【課題】変位センサの電気的失陥と機構的失陥とを、故障検知方法やシステムを複雑化することなく簡便且つ正確に検出すること。
【解決手段】センサ軸24は連結部34によるペダル10との機械的な連結を解かれた状態ではセンサ本体22に対して正常時の相対変位レンジを超える位置に変位する設定になっており、センサ出力値が前記相対変位レンジにおける最大値より大きい所定の上限設定値を上回った場合、あるいは前記出力値が前記相対変位レンジにおける最小値より小さい所定の下限設定値を下回った場合には異常判定を行う電気的異常判定手段と、センサ出力値が前記相対変位レンジにおける最大値より所定量大きい設定値を上回った場合、あるいは前記出力値が前記相対変位レンジにおける最小値より所定量小さい設定値を下回るった場合には異常判定を行う機構的失陥異常判定手段とを設ける。
(もっと読む)
角度検出装置、操舵装置、作業車両、および角度検出方法
【課題】角検出精度を向上させることができる角度検出装置および角度検出方法の提供。
【解決手段】互いに位相差を有するsin信号およびcos信号を出力する角度センサと、sin、cos信号の信号変化率に基づいて、sin、cos信号の一方を選択して角度検出に用いる制御部と、を備え、制御部は、第1、第2信号の一方の信号変化率(電圧勾配)が他方の信号変化率(電圧勾配)よりも小さくなる場合に、選択される信号を前記一方から前記他方へと切り替える。このように2つの信号を選択的に用いることで、変曲点に近く分解能が悪い領域の信号値が角度検出に用いられることが回避されるので、角検出精度を向上させることができる。信号変化率の大小は、sin、cos信号の電圧に基づいて判断することができる。
(もっと読む)
回転角度センサのフェール検知装置
【課題】被検知体に対応する回転角度センサがひとつであっても、回転角度センサのフェールを確実に検知できる回転角度センサのフェール検知装置を提供する。
【解決手段】カム25を、電動モータ1によって一方向に回転駆動されてプッシュロッド35を往復動作するように構成し、角度センサ21の出力電圧Sは、第1の所定電圧V1以下の領域および第1の所定電圧V1より大きい第2の所定電圧V2以上の領域が不感帯Dとして認識する。プッシュロッド35と当接するカム25のカム面を作動面側から非作動面側に移行させる際に、非作動面の所定位置まで一定速度でカム25を回転駆動させる。カム25の非作動面内でかつ所定位置までの間の位置に不感帯Dを配設する。不感帯Dに移行後の経過時間をタイマ54で計測し、不感帯Dの通過予定時間が経過したにもかかわらず不感帯Dに対応する出力電圧Sが検知された場合にフェール状態と判定する。
(もっと読む)
静電容量検出装置
【課題】ノイズ検出用の電極を別途設けることなく、ノイズの有無を検出できる静電容量検出装置を提供する。
【解決手段】静電容量を形成する検出電極100と、検出電極100に電流を供給する電流供給部110と、電流供給部110から検出電極100へ電流を供給する条件を異なる条件に変化させ、それぞれの異なる条件での検出電極100の出力値に基づいて検出電極100に電磁ノイズが印加されたかどうかを判断する制御を行なう制御部200と、を有して静電容量検出装置10を構成する。これにより、別途、ノイズ検出部を設けることなく、静電容量を検出するための検出電極100のみを有し、この検出電極100において静電容量の検出とノイズの有無の検出が可能となる。
(もっと読む)
モータ制御装置、モータ制御方法
【課題】レゾルバの検出角度に関わらず検出精度が向上することが可能なモータ制御装置、モータ制御方法を提供することを目的としている。
【解決手段】微分係数が不連続な点を有する角度検出信号を検出して出力する角度検出部12と、検出された角度検出信号の不連続点を検出する不連続点検出部131と、検出された不連続点近傍の角度検出信号を、不連続点以前のランプ波形の角度検出信号に置換して出力する置換部133と、角度検出部の出力信号または置換された出力信号を、基準値と比較し直線近似により制御信号を算出する制御信号算出部134と、を備える。
(もっと読む)
角度検出装置
【課題】回転軸の角度検出を高精度にする。
【解決手段】一つの実施形態によれば、角度検出装置では、レゾルバが回転機器の回転軸の角度検出を行い、回転角度に応じて励磁信号を振幅変調した第1の信号及び第1の信号と直交する第2の信号を生成する。第1のAD変換部は、第1の信号が入力され、第1の信号をアナログ・デジタル変換する。第2のAD変換部は、第2の信号が入力され、第2の信号をアナログ・デジタル変換する。第1の遅延回路は、第1のAD変換部から出力される第3の信号が入力され、第3の信号の位相調整を行う。第2の遅延回路は、第2のAD変換部から出力される第4の信号が入力され、第4の信号の位相調整を行う。位相検出調整手段は、第1及び第2の遅延回路から出力される信号の位相をモニターし、位相ズレが発生した場合に第1及び第2の遅延回路に位相調整の指示をする。
(もっと読む)
角度検出装置
【課題】回転軸の角度検出を高精度にする。
【解決手段】一つの実施形態によれば、角度検出装置は、角度検出センサ、第1のAD変換部、第2のAD変換部、第1のオフセット補正部、及び第2のオフセット補正部が設けられる。角度検出センサは、回転機器の回転軸の角度検出を行い、第1の信号及び第1の信号と直交する第2の信号を生成する。第1のAD変換部は、第1の信号が入力され、第1の信号をアナログ・デジタル変換する。第2のAD変換部は、第2の信号が入力され、第2の信号をアナログ・デジタル変換する。第1のオフセット補正部は、第1のAD変換部から出力される第3の信号が入力され、第3の信号が所定値の範囲外のときに第3の信号をオフセット補正する。第2のオフセット補正部は、第2のAD変換部から出力される第4の信号が入力され、第4の信号が所定値の範囲外のときに第4の信号をオフセット補正する。
(もっと読む)
ロータリーエンコーダによる測定角度の誤差算出方法
【課題】 回転体の回転角度を精度よく検出することができるロータリーエンコーダによる測定角度の誤差算出方法を提供する。
【解決手段】 回転体を惰行回転させ、回転体の回転に対応するパルスを出力するパルス出力手段から出力されたパルスのパルス列を記録する。次に、パルスに対応する回転角度を時刻の関数として関数近似する。次に、関数近似に基づいて、前記パルスにおける個々のパルスの回転角度に対する位置の誤差を算出する。
(もっと読む)
磁気式エンコーダ
【課題】長さ寸法や角度などを測定する計測器具の用途に適した高精度・高信頼度でかつ安価な磁気式エンコーダを実現すること。
【解決手段】同一ピッチでN極とS極が交互に着磁されたテープ状磁気スケール部材を外周面に貼り付けて構成された磁気記録回転体と、磁気記録回転体に近接配置したA相、B相の磁気情報検出出力を出力する磁気情報検出手段とを有し、テープ状磁気スケール部材の両端部における出力信号の変化に基づいてZ相の信号出力が得られるようにした。また、磁気情報検出手段を適当な間隔で2個以上配設することで、磁気シート部材の貼り付け範囲の角度以上の回転角度の情報を得ることができるようにした。
(もっと読む)
磁界角計測装置,回転角計測装置およびそれを用いた回転機,システム,車両および車両駆動装置
【課題】磁気抵抗素子をブリッジ構成で用いた回転角計測装置において、異常が発生すると正しい角度が出力されないので、それを用いた上位システムも機能停止するという課題があった。
【解決手段】ブリッジ60,61をそれぞれ構成するハーフブリッジのうち、正しい方のハーフブリッジの出力信号に基づいた磁界角度(回転角度)を信号151として出力する。
(もっと読む)
ロータリエンコーダの信号処理方法
【課題】回転体の回転速度が高速である場合を含む幅広い速度範囲において、回転体の実際の回転状態に整合したロータリエンコーダのパルス信号のレベル値の切替わりを検知し、回転体の回転状態の把握を高い信頼性で行なう。
【解決手段】チャタリング排除時間を使用してチャタリング現象等に起因するパルス信号のレベル値の切替わりを除外した検知対象切替わりを検知する毎に、パルス幅を推定し、その推定したパルス幅に応じて、以後の切替わり検知処理で使用するチャタリング排除時間を設定する。推定したパルス幅により示される回転体の回転速度、又は推定したパルス幅から予測される回転体の将来の回転速度が速いほど、チャタリング排除時間を短くするように、該チャタリング排除時間を設定する。
(もっと読む)
バーニア式位置検出装置
【課題】位置検出の分解能を向上することができるバーニア式位置検出装置を提供する。
【解決手段】回転板3は、2枚の回転板9,10が重ね配置された形状をとる。第1回転板9の周縁に、軸4回りに沿って第1被検出突部6bを複数(3つ)設け、第2回転板10の周縁に、軸4回りに沿って第2被検出突部7bを複数(2つ)設ける。そして、第1被検出突部6bの対向位置に第1センサ部6aを配置し、第2被検出突部7bの対向位置に第2センサ部7aを配置する。第2回転板10を第1回転板9に対して基準位置から回転方向に所定角度ずらし配置する。これにより、回転板3の回転時、第1センサ部6aから割り出される符号と、第2センサ部7aから割り出される符号とが、交互に値が切り換わる。
(もっと読む)
回転角度検出装置
【課題】任意のタイミングでオフセット補正を可能とし角度検出精度を向上させた回転角度検出装置を提供する。
【解決手段】回転角度検出装置は、オフセット補正するにあたり、回転角度θに対応する電気角が予め定めた所定角度になるタイミングをレゾルバ信号evの振幅中心値を算出するタイミングとして設定するとともに、レゾルバ信号evの値と所定角度とに基づいてレゾルバ信号evの最大値及び最小値を算出するための比率に関する比率情報を予め設定しておき、算出タイミングで算出されるレゾルバ信号evの最大値及び最小値からレゾルバ信号evの振幅中心値を求め、この振幅中心値と基準中心値との偏差に基づいてオフセット補正を行う。
(もっと読む)
1 - 20 / 81
[ Back to top ]