
Fターム[2F077TT61]の内容
感知要素の出力の伝達及び変換 (32,270) | 信号処理回路(特性補償雑音除去を除く) (4,069) | 原点関連 (142)
Fターム[2F077TT61]の下位に属するFターム
原点検出、原点パターンの検出 (106)
原点復帰 (8)
Fターム[2F077TT61]に分類される特許
1 - 20 / 28
ブラシレスDCモータの回転子位置検出方法とその装置
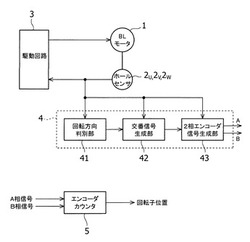
【課題】 3つのホールセンサの信号出力とパルス交番信号の、合計4つの信号の値から、2相エンコーダの出力に相当する信号を生成することによって、モータ回転子の回転方向を判別することができるブラシレスDCモータの回転子位置検出方法とその装置を提供する。
【解決手段】 3つのホールセンサ2U,2V,2W信号の現在値と、その1つ前の値とから、前記回転子の回転方向を判別し、前記3つのホールセンサ2U,2V,2Wのうち、いずれか1つの立ち上がりエッジまたは、立ち下がりエッジを基準位置とし、かつ、この基準位置として立ち上がりエッジを選択するか、あるいは、立ち下がりエッジを選択するかは、前記回転子の回転方向によって決定して、前記基準位置を通過する度に交番する交番信号を生成し、前記3つのホールセンサ2U,2V,2Wの信号と、前記交番信号とから、2相エンコーダ出力相当のパルス信号を生成し、このパルス信号によって前記回転子位置を検出する方法。
(もっと読む)
データム調整を伴う誘導センサ

【課題】 データム調整を伴う誘導センサを提供する。
【解決手段】 誘導位置センサは、移動可能なコア部材と、第1のセンサ巻線と、第2のセンサ巻線とを含む。第1および第2のセンサ巻線間の誘導結合はコア部材の位置を示すセンサ出力を提供する。センサは、コア部材のデータム位置を設定するための調整器を含む。調整器は、第1および第2の調整器巻線と調整部材とを含み、該調整部材は、移動可能であり、コア部材がデータム位置にあるときにセンサ出力をオフセットする調整器出力を提供するように、第1および第2の調整器巻線間の誘導結合を変化させる。
(もっと読む)
回転角度検出装置
【課題】 安価で耐久性のあるレゾルバを使用しながら、絶対的な回転角度位置を認識することが可能な回転角度検出装置を提供する。
【解決手段】 回転角度検出装置は、レゾルバ14におけるロータ32の外周部に90度の角度毎に配設された4個のホールIC41、42、43、44と、ロータ32に付設された磁石37とを備える。磁石37は、ロータ32の外周部の約100度の角度範囲に至る領域に配設されている。この磁石37は、ロータ32と同期して回転し、その回転角度位置に対応して、4個のホールIC41、42、43、44のうちの1個のホールIC、または、隣接する2個のホールICが磁気を検出する。
(もっと読む)
キャンバ角調整装置
【課題】安価でありながら、信頼性のあるキャンバ角調整装置を提供する。
【解決手段】駆動部材2と連結されるクランク軸4a1,4b2及びクランク軸に対して偏心したクランクピンを有するクランク部4と、一端の第1連結部でクランクピンに連結される連結部材51と、車体に連結されると共にキャンバ軸を形成するキャンバ部材と、車輪を回転可能に支持すると共に、鉛直方向の一方側でキャンバ部材に回動可能に支持され、他方側で連結部材51の他端に第2連結部で連結される回動部材と、クランク部4の回転角度を検出するインクリメント式のロータリーエンコーダ6と、モータに流れる電流を検出する電流検出部材60と、電流検出部材60の検出値に応じてロータリーエンコーダ6の原点を補正する制御部と、を備えることを特徴とする。
(もっと読む)
回転角度算出装置
【課題】誤差相関量εをゼロにフィードバック制御するための操作量として回転角度φを算出する場合、フィードバック制御によって回転角度φがハンチングする現象が生じえ、これにより、Z信号が誤って複数回出力されるおそれがあること。
【解決手段】比例ゲイン乗算部44では、誤差相関量εに比例ゲインKpが乗算され、積分ゲイン乗算部46では、誤差相関量εに積分ゲインKiが乗算される。積分ゲイン乗算部46の出力は、積分要素48に入力される。比例ゲイン算出部44の出力と積分要素48の出力との和が回転角度φである。回転角度φがZ信号に対応する基準角度θ0近傍となる場合、比例ゲインKpと積分ゲインKiとを低減する。
(もっと読む)
位置検出装置及び位置検出方法
【課題】温度特性のバラツキを解消し、縦方向のガタツキによる誤差をなくすようにした位置検出装置及び位置検出方法を提供すること。
【解決手段】ホール素子(22a)のホール電圧Vhe1は、A・K・Bhe1(Aはプレアンプ(32)の増幅率、Kは定数、Bhe1はホール素子が受ける磁束密度)になったとすると、PIレギュレータ(41)はフィードバック制御によってA・K・Bhe1+Vref=AGND(=0)になるように、PI出力のバイアス点を自動的に変化させる。増幅後のホール素子(22b)のホール電圧Vhe2はA・K・Bhe2となる。K=−Vref/A・Bhe1であるから、ホール素子のホール電圧Vhe2は、−Vref・Bhe2/Bhe1となる。ホール電圧は、磁束密度と比例するので、ホール素子(22a)とホール素子(22b)の出力電圧を割り算していることと等価である。
(もっと読む)
位置検出装置
【課題】周辺の温度変化の影響を受けることなく、被検知物の移送量および移動方向を正確に検出できる位置検出装置を提供する。
【解決手段】所定方向へ移動可能な被検知物1に対して連動する位置検知部材11と、第1の永久磁石12と、先端部に前記位置検知部材11を保持し、基端側が第1の永久磁石12に接続され、先端と基端との間の支点部150を中心に回動変移可能に枢支されたアクチュエータ構体15と、第1の永久磁石12に対して、磁極が相反する方向でかつ間隔を置いて設置された第2の永久磁石13と、両永久磁石12,13の磁界が相殺される位置に配置されて、磁界変化を検出する磁気センサ14を備え、磁気センサ14の出力電圧を監視して被検知物の移動方向および移動量を検出する。
(もっと読む)
トルクインデックスセンサ
【課題】トルクセンサとインデックスセンサの機能を併せ持ち、部品点数が少なく、コンパクトなトルクインデックスセンサを提供する。
【解決手段】操舵操作によって回転する回転軸2が受けるトルクを偶数個の磁気検出素子3a,3bによって検出するトルク検出部4と、トルク検出部4の磁気検出素子3a,3bによって回転軸2の回転基準位置を検出する回転基準位置検出部5とを備え、回転基準位置検出部5は、回転軸2に伴って回転され、周囲に案内溝6が形成されたカラー7と、カラー7の回転に伴い案内溝6に案内されて磁気検出素子3a,3bに対して接近/離反するインデックス用磁石8とを備える。
(もっと読む)
系統的な誤差処理方法
駆動装置の情報管理システム及び駆動装置の製造方法
【課題】回転電機と回転センサとの間の位相差を、簡易且つ低コストに調整することを可能とする駆動装置の情報管理システム及び駆動装置の製造方法を提供する。
【解決手段】回転電機10と当該回転電機10のロータの回転位置を検出する回転センサ20とを備えた駆動装置2の情報管理システム1であって、回転電機10と回転センサ20との組み付け後に回転電機10を機械的に駆動して逆起電力を測定する検査工程において、当該逆起電力の情報と回転センサ20からの出力情報とに基づいて得られる回転センサ20の位置誤差情報を記憶する記憶媒体4を備え、記憶媒体4が、回転電機10を制御する制御装置3の回転電機10への組み付けに際して通信を介して読み取り可能な状態で設けられている。
(もっと読む)
アブソリュート型リニアエンコーダ、及び、その位置調整方法
【課題】当初(例えば工場出荷時等)の位置関係と異なる位置関係でスケールと検出ヘッドが組付けられた場合でも、迅速に位置信号の補正を行い、所望の位置精度に基づき、絶対位置を求める。
【解決手段】スケール110の特定箇所(基準マーク110A)と前記検出ヘッド120の特定箇所(基準マーク120A)とを該検出ヘッド120の移動方向Xで一致させた位置を基準位置Oとして、該基準位置Oを設定した際に該基準位置Oで求められる下位トラック114の周期Tdtの数番号データMoと、機械装置に組付けた際に該基準位置Oで求められる該下位トラック114の周期Tdtの数番号データMo1と、の差である差分データΔMoを記憶する記憶回路128と、前記差分データΔMoを前記記憶回路128より読み出して、該差分データΔMoにより該検出ヘッド120で求められる位置データXprtを補正する処理回路126と、を備える。
(もっと読む)
角度検出装置
【課題】高精度の絶対回転角度を検出する安価な角度検出装置を提供する。
【解決手段】回転モータを回転部材がストッパによって止められるところまで回転させ、このときセミアブソリュート型角度検出器が出力した検出角度を基準角度として初期化し、この初期化後にセミアブソリュート型角度検出器の回転数であるピッチ数とセミアブソリュート型角度検出器の最大検出角度であるピッチ角を掛けた積と実測した検出角度を足した和から基準角を引いた差を絶対回転角度として算出する。
(もっと読む)
レゾルバロータの取付方法
【課題】レゾルバステータとレゾルバロータの磁気中心のずれが小さく、安価で位置精度のよいレゾルバの取付方法を提供する。
【解決手段】レゾルバステータ20をモータブラケット31に芯出し固定した後、レゾルバロータ10のロータコア11の上端面と、レゾルバステータ20の露出したティース21aの上端面とを、位置決め治具40を用いて面一に揃え、レゾルバロータ10の原点とモータ本体30の誘起電圧位相とを合わせてモータシャフト32固定する。
(もっと読む)
原点パターン生成方法および原点信号付き回転角度検出器
【課題】信頼性が高く、また、取り付け誤差による影響が小さく精度の高い原点信号が得られる原点信号検出パターンの生成方法および原点信号付き回転角度検出器を提供する。
【解決手段】基本パターンP0の1の部分に、基本パターンと同じパターン列を配置し、0の部分に、基本パターンと同じ桁数の0パターンを配置し、1次展開パターンP1を得る。さらに、1次展開パターンの1の部分に、基本パターンP0と同じパターンを配置し、0の部分に、基本パターンと同じ桁数の0パターンを配置することによって、2次展開パターンP2を得る。同様に、N−1次展開パターンの1の部分に、基本パターンP0と同じパターンを配置し、0の部分に、基本パターンと同じ桁数の0パターンを配置することによって、N次展開パターンPnを得る。
(もっと読む)
回転検出装置および回転検出装置付き軸受
【課題】分解能の向上と精度のよい安定した角度検出が可能な回転検出装置、およびこの回転検出装置を組み込んだ検出装置付き軸受を提供する。
【解決手段】回転検出装置は、回転体に設けられた磁石の磁界強度を計測する複数の磁気センサ素子、およびこれら磁気センサ素子の計測値から磁石の回転角度を演算する角度計算手段を有する回転角度センサを備える。一定期間における角度計算手段の出力する回転角度のデータを統計処理することにより回転状態を推定する回転状態推定手段と、推定された回転状態から以降の回転角度を予測する回転角度予測処理手段と、回転角度センサにより検出される角度データの分解能よりも高い分解能を持ちカウント値がこの回転検出装置の出力角度データとされる現在位置カウンタとを設ける。現在位置カウンタの動作速度をカウンタ動作速度変化手段により、回転角度予測処理手段の予測値と現在のカウント値との差に応じて変化させる。
(もっと読む)
回転検出装置および回転検出装置付き軸受
【課題】 余分な動作や手続きを要することなく、ABZ相信号を用いて絶対角度情報を出力できる回転検出装置、およびこの回転検出装置を組み込んだ回転検出装置付き軸受を提供する。
【解決手段】 回転する部材の回転角度を絶対角度で検出する絶対角度検出センサ3と、この絶対角度検出センサ3が検出した絶対角度に基づき、前記絶対角度検出センサ3の零相であるインデックス信号、および一定間隔のパルス信号を含む回転パルス信号を生成する回転パルス信号生成手段7とを設ける。絶対角度出力モード実行手段8により、前記回転パルス信号を、前記インデックス信号を出力してから現在の絶対角度まで出力するモードである絶対角度出力モードで出力する。
(もっと読む)
磁気誘導物差用誘導読取ヘッドの矯正装置
【課題】取付作業のコストが低減になり、必要の道具の点数も少なくなり、取付精度が良くなり、取付作業が容易になり、且つ誘導読取ヘッドを取付けた後に、誘導読取ヘッドの動作が正確かどうかを確認することが可能になる。
【解決手段】磁気誘導物差を検知するときに方形波信号を発生するホールセンサーを含むセンサーユニットと、前記センサーユニットの信号状態を表示する表示素子を含む信号表示ユニットと、前記センサーユニットの信号を一組のZ及び/Z信号に転換して、前記信号をメインフレームに転送する信号出力ユニットとを含むことを特徴とする磁気誘導物差用誘導読取ヘッドの矯正装置。
(もっと読む)
磁束密度のゼロ位置通過を安定化させた位置センサ用エンコーダ
【課題】空隙変化に対し安定な位置及び/又は速度センサ用エンコーダを提供する。
【解決手段】一の小磁極Pと一の大磁極Gとの間に少なくとも一の接合面Jを有しており、大磁極Gは小磁極Pの角度幅よりも大きな角度幅を有し、各接合面Jに対応する小磁極Pと大磁極Gは反対符号の極性を有するエンコーダに関する。各接合面Jに関して、所定の符号を有する大磁極Gは、一方では、前記所定符号と同じ符号の少なくとも一の小安定極psであって、反対符号の小磁極Pに隣接し、この小磁極Pの角度幅と実質的に同一の角度幅を有する小安定極psと、他方では、小安定極psと同じ符号の少なくとも一の相補極pcであって、この相補極pc及び/又は小安定極psが、磁束密度における放射方向成分のゼロガウス位置通過を安定化するように適合された傾斜型の磁界強度を示す相補極pcとから成る。
(もっと読む)
エンコーダを初期化する方法
【課題】エンコーダの走査ヘッドとスケールとの位置が、最初は正確な位置測定を不可能にする場合でも、位置測定系が、多数の自由度に対して初期化され得る方法を提供する。
【解決手段】測定フレームに対して少なくとも2つの自由度で移動する物体に対して、スケールは、相対位置を測定するインクリメンタルトラック及び絶対位置を測定するアブソリュートトラックを有する。初期化ステップでは、インクリメンタルトラック又はアブソリュートトラックが、第1の評価方法によって評価され、評価結果が生成される。整合ステップでは、移動する物体が、評価結果に基づいて測定フレームに対して整合される。検出ステップでは、アブソリュートトラックが、第2の評価方法によって走査ヘッドと付随するスケールとの整合に関する僅かな許容誤差で評価され、正確な絶対位置が、各自由度に対して算定される。
(もっと読む)
回転角度検出装置及びその初期設定方法
【課題】演算負荷を抑えつつ、主動歯車と従動歯車との間のバックラッシに起因する検出誤差を低減することができる回転角度検出装置及びその初期設定方法を提供する。
【解決手段】正方向誤差(回転角度α1,β1)を求める段階(S1−2〜S1−5)、逆方向誤差(回転角度α2,β2)を求める段階(S1−6〜S1−9)、正方向誤差と逆方向誤差との平均値(回転角度αave,βave)を求める段階(S1−11)、主動歯車14の回転角度が0°となる誤差を含まない理論的な第1及び第2の従動歯車15,16の回転角度α0,β0と前記平均値との差(オフセット値αofs,βofs)を求める段階、被検出物の回転角度θを求める際に、実際に検出された第1及び第2の従動歯車15,16の回転角度α,βに加算される補正データとしてオフセット値αofs,βofsを記憶する段階を経て、回転角度検出装置11の初期設定を行うようにした。
(もっと読む)
1 - 20 / 28
[ Back to top ]