
Fターム[2F105BB01]の内容
Fターム[2F105BB01]の下位に属するFターム
感度向上 (338)
ノイズ低減 (509)
安定化 (320)
ダイナミックレンジの拡大 (18)
Fターム[2F105BB01]に分類される特許
61 - 80 / 97
加速度・角速度センサ

【課題】加速度及び角速度の検出範囲を広げることができると共に、歩留まりの向上を図ることができる加速度・角速度センサを提供する。
【解決手段】物体の運動に応じて変位する変位部と、この変位部と間隔をあけて対向する電極基板とを備え、前記変位部を前記電極基板面と垂直な方向に振動変位させた状態で、前記変位部と前記電極基板に設けた電極との間に形成される静電容量の変化に基づいて、前記物体の加速度及び角速度を検出する加速度・角速度センサにおいて、前記電極基板に、電圧を印加することにより前記変位部を変位させる複数の変位印加電極を設けると共に、前記複数の変位印加電極の少なくとも一つに変位電圧を印加する変位電圧印加部を設けた。
(もっと読む)
回転レートセンサ
本発明は駆動系質量体要素(3,13)と、検出系質量体要素(8,14)と、検出装置とを有し、前記駆動系質量体要素(3,13)は基板の表面に配設され、駆動装置によって前記表面に沿って延在する第1の軸線(y)に沿って振動させるべく駆動可能であり、前記検出系質量体要素(8,14)は第2の軸線(z)に沿ってコリオリ力の作用のもとで偏倚可能であり、前記検出装置は、第2の軸線(z)に沿った検出系質量体要素(8,14)の変位が検出可能である、回転レートセンサに関している。本発明によれば、前記第2の軸線(z)が基板表面に対して垂直方向に延在する。 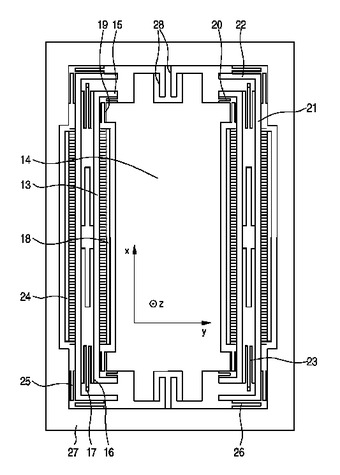 (もっと読む)
(もっと読む)
容量式物理量センサ

【課題】容量式物理量センサにおける信号処理の高速化を図り、容量式物理量センサのさらなる高速動作を実現する。
【解決手段】C−V変換回路21におけるオペアンプ21aの反転入力端子と非反転入力端子との間にスイッチ21cを備え、反転入力端子の電位をVcc/2にする際に、元々Vcc/2の電位が入力されている非反転入力端子に接続する。これにより、反転入力端子の電位を瞬時にVcc/に確定させられる。したがって、加速度センサの信号処理をさらに高速化させられ、さらなる高速動作を実現することが可能となる。
(もっと読む)
角速度センサ音叉出力測定回路
【課題】本発明は角速度センサを構成する音叉振動子の出力特性を高精度で測定可能な角速度センサ音叉出力測定回路を提供することを目的とする。
【解決手段】音叉振動子1のドライブ端子11とモニター端子12に接続される発振回路6と、音叉振動子1の一方のアームに形成された圧電素子からの信号を出力する第一の出力端子13または音叉振動子1の他方のアームに形成された圧電素子からの信号を出力する第二の出力端子14に接続される切換器2と、この切換器2に接続される交流電圧/直流電圧変換器3と、この交流電圧/直流電圧変換器3に接続されるアナログ/デジタル変換器4と、このアナログ/デジタル変換器4に接続されるコントロール部5を備えた構成とした。
(もっと読む)
ディザースプリング及びリングレーザジャイロ
【課題】温度が変化してもリングレーザジャイロのレーザ共振器を構成するブロックに応力が加わることのないようにする。
【解決手段】底板10と、底板10上に配置された複数の基部20と、それら基部20に接合・支持された複数の振動部30とを具備する。振動部30はリングレーザジャイロのブロックの取り付け穴に内接する外周部31と、その外周部31から伸長された振動梁32とよりなる。基部20は振動梁32の内端と接合される接合部21と、その接合部21から外周部31に向って延長された一対の延長部22とよりなり、延長部22の延長端側において底板10と固定される。半径方向の各寸法L1,L2,L3と底板10、基部20、振動部30の各線膨張係数α1,α2,α3は、L1α1+L3α3=L2α2を満たすように選定される。温度が変化しても外周部31の外径は変化しないものとなる。
(もっと読む)
慣性力センサ
【課題】急速充電が可能で、デジタルカメラ等に用いた場合は起動直後から手振れ補正を可能にする慣性力センサを提供することを目的としている。
【解決手段】ハイパスフィルタ38のコンデンサ56を急速充電する急速充電手段を設けており、この急速充電手段は、ローパスフィルタ36とハイパスフィルタ38の両方の抵抗48、54に各々にスイッチ64、66を並列接続するとともに、このスイッチ64、66をオンして抵抗48、54を介さずにハイパスフィルタ38のコンデンサ56を急速充電する手段を設けている。
(もっと読む)
水晶振動子及び角速度センサ
【課題】高い対称性が得られた状態で、Z軸を法線とする同一の平面内で各々120°異なる方向に延在する3つの脚部を備えた水晶振動子及び角速度センサが形成できるようにする。
【解決手段】脚部121は、これが延在しているX軸に線対称に配置されてX軸の側より上記平面内で凸に曲がる2つの脚部材121a及び脚部材121bから構成されている。同様に、脚部122は、これが延在しているX軸に線対称に配置されてX軸の側より上記平面内で凸に曲がる2つの脚部材122a及び脚部材122bから構成され、脚部123は、これが延在しているX軸に線対称に配置されてX軸の側より上記平面内で凸に曲がる2つの脚部材123a及び脚部材123bから構成されている。
(もっと読む)
薄膜構造体の形成方法並びに薄膜構造体、振動センサ、圧力センサ及び加速度センサ
【課題】機械的応力が制御された弱い引張応力を持ち、かつ、導通化された薄膜構造体を形成するための方法を提供する。
【解決手段】Si等の基板32の上にポリシリコン薄膜からなる下層膜35を形成した後、下層膜35にP等の不純物をドープして熱拡散させることにより下層膜35を導通化させる。ついで、下層膜35の上に、成膜されただけで導通化されていないポリシリコン薄膜からなる上層膜36を成膜する。上層膜36は、下層膜35の圧縮応力と同程度の引張応力を有しており、下層膜35及び上層膜36からなる薄膜構造体Aは全体として弱い引張応力を有するように調整されている。
(もっと読む)
水晶デバイスの製造方法
【課題】 本発明は、振動モード調整を精度良く行うことによって高精度の水晶デバイスを提供することが目的であり、且つ加工によるダメージの少ない信頼性の高い水晶デバイスを提供することが目的である。
【解決手段】 水晶からなる基部と基部から突出した振動脚とを有する振動体と電極とを備えた水晶デバイスの製造方法において、水晶からなる振動体をウェットエッチング法によって形成する工程と、水晶のエッチング異方性によって発生した振動脚の付け根付近のエッチング残渣をフェムト秒レーザーによって加工して振動モードを調整する工程を備えたことを特徴としている。エッチング残渣を加工することで水晶デバイスに与えるダメージを極力少なくすることができる。また、二つのレーザー光源と焦点位置測定機を備えた加工システムを用い、第一のレーザー光で加工部に焦点を合わせ、第二のレーザー光で加工することにより、精度よく加工できる。
(もっと読む)
音叉型振動子
【課題】車両姿勢制御用等に用いられる角速度/加速度センサに用いられる音叉型振動子に関するものであり、角速度と加速度の検出精度が低下することを防止することを目的とする。
【解決手段】振動子1のアーム2,3に角速度検出部23,24を、基部4に加速度検出部25を形成して角速度と加速度の検出部を個別に設けることにより、角速度出力と加速度出力のそれぞれの干渉を小さくし、高精度に検出することができるようにする。
(もっと読む)
角速度センサ
【課題】 小型で高精度な多軸角速度センサを大量生産する。
【解決手段】 上面がXY平面に沿った基板100上にZ軸に沿って枢軸130を設け、外側部分が環状構造体をなすロータ200を嵌合させる。ロータ200は、傾斜自在かつ回転自在となるように枢軸130によって支持される。ステータ111,115に交流電圧を供給すると、ロータ200は浮上しながら回転する。基板100に対してX軸まわりの角速度ωxが作用していると、Y軸正方向の速度成分をもってX軸上空を移動するロータ100の部分211にはZ軸正方向のコリオリ力Fczが作用して基板から遠ざかる。基板側の固定電極対141A,141Bとロータ側の移動電極231とによって容量素子が形成される。固定電極対141A,141Bの間の静電容量値を測定することにより、コリオリ力Fczの大きさを検出でき、これを角速度ωxの値として出力する。
(もっと読む)
振動ジャイロ
【課題】 外界の衝撃や振動と内部振動系を分離した高性能の振動ジャイロを実現する。
【解決手段】 本発明の振動ジャイロは、複数の脚部と基部と支持部とを備えた振動子と、この振動子を収容する筐体と、前記振動子へ不要な振動が伝達するのを防止し、前記支持部を設けた防振部材と、を有する振動ジャイロであって、前記防振部材は、少なくとも一部に開放部を有すると共にばね性を備えた枠状に形成され、かつ、弾性部材を介して筐体に固着されることを特徴とする。これにより、外界の衝撃や振動と内部振動系を分離した高性能の振動ジャイロを実現できる。
(もっと読む)
ヨーレートを求めるための方法および装置
本発明はヨーレート(N)を求める方法に関する。本方法では、自らの温度(T)に線形に依存する固有周波数(FE)をもったセンサ素子(2)が、一次操作量(E_PRIM)に依存して、第1の軸(AXIS_1)に沿って一次振動へと励起される。前記一次振動を表す一次測定信号(A_PRIM)が検出される。さらに、前記第1の軸(AXIS_1)に対してゼロでない角度をなす第2の軸(AXIS_2)に沿った二次振動を表す二次測定信号(A_SEC)を検出される。前記センサ素子(2)の固有周波数(FE)が求められる。求められた固有周波数(FE)のみに依存して、前記一次操作量(E_PRIM)および/または他の少なくとも1つの操作量に影響を与える少なくとも1つの値が適応変化させられる。二次出力信号(A_SEC)の振幅および/または位相に依存して、ヨーレート(N)が求められる。さらに、温度(T)に依存して、ヨーレート(N)の算出に影響を与えるヨーレート補正値(E6,E7)を適応変化させてもよい。  (もっと読む)
(もっと読む)
振動体及びその製造方法並びに物理量センサ
【課題】 本発明は、高精度で信頼性の高い振動体及びその製造方法並びに物理量センサを提供することが目的である。
【解決手段】 基部とこの基部から突出して形成される振動脚とを有した振動体をレーザー光によって加工する振動体の製造方法において、前記振動体の内部を透過したレーザー光を前記振動体の所定位置に集光させて前記振動体の一部を除去する工程を備えたことを特徴とする振動体の製造方法。これにより、従来加工が困難であった部分も容易に加工することができ、加工の自由度が向上する。
(もっと読む)
センサユニット
【課題】加速度センサ及び角速度センサを高精度にかつ再現性よく位置決め固定できるセンサユニットを提供する。
【解決手段】センサユニット10は、基準ベース12を有する。基準ベース12の底面12A及び一側面12Bを基準面として用い、加速度センサブロック14及び角速度センサ取付支柱を基準ベース12上に設ける。X軸、Y軸、Z方向の加速度をそれぞれ検出する3個の加速度センサ16を加速度センサブロック14の各面に接着し、各軸回りの角速度を検出する3個の角速度センサ24を防振ゴムとしてのゴムブッシュ20を介して支柱にネジ22で締め付け固定する。
(もっと読む)
圧電素子及びその製造方法
【課題】圧電特性を損なうことなく生産性及び歩留まりの向上を図ることができる圧電素子及びその製造方法を提供する。
【解決手段】基板と、この基板の上に形成された第1電極膜(基準電極104a)と、この第1電極膜の上に形成された圧電膜105aと、この圧電膜の上に形成された第2電極膜(駆動電極膜106a、検出電極106b,106c)とを備えた圧電素子からなる振動型ジャイロセンサ100において、圧電体薄膜を成膜する成膜工程と当該圧電体薄膜を熱処理して結晶化させる結晶化熱処理工程とを複数回繰り返し行うことで、結晶化された圧電体薄膜の積層構造からなる圧電膜105aを所定の厚みにまで形成する。これにより、層厚方向に均一な結晶性を有する圧電膜を作製することができる。
(もっと読む)
圧電振動片の製造方法、並びに圧電振動片、並びに圧電デバイス、及び電子機器
【課題】
小型化された音叉型圧電振動片を形成する際の電極形成時のフォトリソ工程において、又部に対する露光精度を向上させることができる圧電振動片の製造方法を提供する。
【解決手段】
上記課題を解決する圧電振動片の製造方法は、複数の振動腕を備え、音叉型を成す圧電振動片を製造する際における電極形成時のフォトリソグラフィ工程において、マスク20を圧電振動片10の電極形成面に形成したレジスト19に接触させ、複数の前記振動腕間に形成される又部16に対する照射光が垂直に照射される方向に近づくように光源30を傾斜させて露光を行うことを特徴としたものである。
(もっと読む)
運動量平衡及びモード分離を有するねじれ速度センサ
【課題】角速度センサ又はジャイロスコープ、特に、運動量が平衡化され、かつ駆動及び感知モードが分離された二重質量速度センサを提供する。
【解決手段】複数のほぼ平面の質量体と、質量体を質量体の平面内の駆動軸線の周りで振動するように駆動するための手段と、駆動軸線に垂直な入力軸線と、駆動軸線と入力軸線とに垂直な感知軸線と、入力軸線周りの質量体の回転によって生じたコリオリ力に応答して感知軸線周りにねじれ移動するように質量体を取り付ける手段と、感知軸線周りのねじれ移動に応答して入力軸線周りの回転の速度をモニタするための手段とを有する速度センサ。
(もっと読む)
運動量平衡及びモード分離を有するねじれ速度センサ
【課題】角速度センサ又はジャイロスコープ、特に、運動量が平衡化され、かつ駆動及び感知モードが分離された二重質量速度センサを提供する。
【解決手段】複数のほぼ平面の質量体と、質量体の各々の平面内の駆動軸線と、質量体を駆動軸線の周りで振動するように駆動するための手段と、駆動軸線に垂直な入力軸線と、駆動軸線と入力軸線とに垂直な感知軸線と、入力軸線周りの質量体の回転によって生じたコリオリ力に応答して感知軸線周りにねじれ移動するように質量体を取り付ける手段と、感知軸線周りのねじれ移動に応答して入力軸線周りの回転の速度をモニタするための手段とを含む速度センサ。
(もっと読む)
マイクロメカニカルモーションセンサ
本発明は、周期的な駆動電圧が静電的に印加される振動駆動部(KA1,KI1,KA2,KI2)によって、永続的な、周期的な振動(γ(t))を励振する片持ちばね部材(1,2)に加わる偏向を検出することができるマイクロメカニカルモーションセンサに関する。片持ちばね部材(1,2)の共振周波数特性の生起した非直線性を補償するために、既存のカム駆動部(KA1,KI1,KA2,KI2)に、通常の駆動電圧信号と補償駆動信号との和(UPKA,Ges,UPKI,Ges)を印加することができる。択一的な実施例では、振動駆動のために使用されるカム駆動ユニット(KA1,KI1,KA2,KI2)に対して付加的に、別個の補償カム駆動ユニットを設けることができ、この補償カム駆動ユニットに、非直線性を補償する補償電圧信号が印加される(図3)。  (もっと読む)
(もっと読む)
61 - 80 / 97
[ Back to top ]