
Fターム[2F105BB01]の内容
Fターム[2F105BB01]の下位に属するFターム
感度向上 (338)
ノイズ低減 (509)
安定化 (320)
ダイナミックレンジの拡大 (18)
Fターム[2F105BB01]に分類される特許
41 - 60 / 97
自動利得制御ループを使用した力平衡制御システム及び制御方法
本発明は、自動利得制御ループを使用した力平衡制御システム及び制御方法に関するもので、質量体の速度信号を制御する自動利得制御ループを使用して振動型角速度計の力平衡フィードバック制御を遂行するように構成され、複雑で雑音に敏感な従来のデジタル回路を簡単なアナログ回路で具現することができ、マイクロ角速度計に適用可能であるのみならず、汎用振動型角速度計または慣性センサー、圧力センサー、温度センサーなどの多様なセンサーに拡張可能な効果がある。
さらに、本発明の自動利得制御ループを使用した力平衡制御システムを多様なセンサーに適用することで、センサーの動的領域、帯域幅、線形性などの性能向上をはかることができる。  (もっと読む)
(もっと読む)
ジャイロスコープシステムによる測定方法
ジャイロスコープシステムには、少なくとも1個の振動ジャイロスコープが含まれる。第1の角度測定手段は、測定軸に沿う第1の角度値を与えるように設計されており、第2の角度測定手段は、上記測定軸に沿う第2の角度値を与えるように設計されている。第1の角度値は、現在の振動位置で振動する第1の角度測定手段によって与えられる。同時に、第2の角度値は、第2の角度測定手段によって与えられる。そこから、第1及び第2の角度値の比較に基づいて、修正された第2の角度値が推論される。次に、第1の角度測定手段の振動位置が、現在の位置から他の位置に変化される。その後、第1の角度値が、第1の角度測定手段によって与えられ、同時に、第2の角度値が、第2の角度測定手段によって与えられる。そして、そこから、第1及び第2の角度値の比較に基づいて、修正された第1の角度値が推論される。 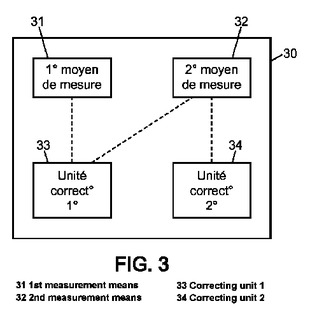 (もっと読む)
(もっと読む)
圧電素子、角速度センサ、及び圧電素子の製造方法

【課題】圧電特性、耐熱性に優れた圧電素子、角速度センサ、及びこの圧電素子の製造方法を提供すること。
【解決手段】
基板上に第1の電極膜34aが形成され、この第1の電極膜34a上にPZT薄膜33が形成されることで、圧電素子139が形成される。PZT薄膜33は、化学式Pb1+X(ZrYTi1−Y)O3+Xで表された場合に、PbO過剰組成比Xが0以上0.3以下であり、Zr組成比Yが0以上0.55以下である。このようにPZT薄膜33が形成されることで、圧電特性に優れた圧電素子139を得ることができる。Zr組成比Yが0以上0.5以下であれば、減分極が生じにくく、耐熱性に優れている。また、膜厚が400nm以上1000nm以下とされることで、さらに圧電特性に優れた圧電素子139を得ることができる。
(もっと読む)
圧電素子、角速度センサ、及び圧電素子の製造方法

【課題】圧電特性、耐熱性に優れた圧電素子、角速度センサ、及びこの圧電素子の製造方法を提供すること。
【解決手段】
基板上に第1の電極膜34aが形成され、この第1の電極膜34a上にPZT薄膜33が形成されることで、圧電素子139が形成される。PZT薄膜33は、化学式Pb1+X(ZrYTi1−Y)O3+Xで表された場合に、PbO過剰組成比Xが0以上0.3以下であり、Zr組成比Yが0以上0.55以下である。このようにPZT薄膜33が形成されることで、圧電特性に優れた圧電素子139を得ることができる。Zr組成比Yが0以上0.5以下であれば、減分極が生じにくく、耐熱性に優れている。また、PZT薄膜33が引張応力を有することで、さらに耐熱性に優れた圧電素子139を得ることができる。
(もっと読む)
ジョグゾーンのない光ファイバコイル
【課題】光ファイバコイル組立体とそれを巻回する方法を提供すること。
【解決手段】光ファイバコイル組立体とそれを巻回する方法は、従来の光ファイバコイル組立体の中に見られコイルを脆弱にする傾向があるジョグゾーンを除去するように構成された光ファイバコイルを含む。光ファイバコイル組立体はコイルの少なくとも2つの層を含む。第1層は、第1回転方向に且つ第1直線方向に円筒状に巻回され、互いに実質的に平行に配置され且つ第1直線方向にわたって延在するコイル直径を含む。第1リード部分は、第1層の端部から、巻回された第1層によって画定された開口を通って延在する。第2層は、それが反対の回転方向に巻回されることを除いて第1層と同様な方法で形成される。第1または第2層の巻回工程にそれぞれ一致するさらなる層が含まれてもよい。
(もっと読む)
マスクパターンの補正方法およびそれを用いた加速度センサと角速度センサの製造方法
【課題】シリコンウェーハ等の被エッチング体を高い精度で加速度センサおよび角速度センサをドライエッチングするためのマスクパターンの補正方法を提供する。
【解決手段】補正前のマスクパターンを用いて、該被エッチング体面内に発生するテーパーの拡がり寸法の分布を測定し、該分布を二次曲線(Y=AX2+B)として表してAとBを特定し、シリコン基板の中央から距離rの位置でのマスクパターンの開口幅のテーパー補正量tを行うとともに、チルト寸法の分布を測定して、該分布を直線(Y=kX)として表してk(k>0)を特定し、SOIウェーハの中央から位置ベクトルr(座標(x,y))でのマスクパターンの開口幅のX軸方向の補正量Cx、Y軸方向の補正量Cyをチルト補正を行う。
(もっと読む)
微小な振幅の交流電流信号を大きな振幅の電圧信号に変換する回路装置
【課題】積分回路を用いて微小な振幅の交流電流信号を大きな振幅の電圧信号に変換する回路装置の高性能化
【解決手段】入力交流電流信号の周期の第1位相にて積分回路オペアンプの出力電圧を第1キャパシタ6に記憶させ、第1位相と180度位相が異なる第2位相にて積分回路オペアンプの出力電圧を第2キャパシタ8に記憶させ、第3位相にて第1キャパシタ6の記憶電圧と第2キャパシタ8の記憶電圧を読み出して加算するとともに、当該加算電圧から第3キャパシタ10の記憶電圧を減算し、当該減算結果の電圧を第3キャパシタ10に記憶させ、第3キャパシタ10の記憶電圧に基づいて積分回路オペアンプの反転入力に補正電流を与える。
(もっと読む)
レーザジャイロ
【課題】低速回転時でも精度よく回転角速度を求めることができるジャイロを提供する。
【解決手段】本発明のレーザジャイロは、周回している光ファイバ11と、光ファイバ11内を互いに逆方向に進行する第1および第2のレーザ光を発生させる半導体光増幅器12と、第1および第2のレーザ光によって発生するビート信号を検出するフォトダイオード16とを備え、光ファイバ11の周回数m(mは整数)が以下の式(1)で表される。
[式中、cは、光速度(m/秒)を示す。λは、第1および第2のレーザ光の波長(m)を示す。γは、共振器内の反射率を示す。B0は、所定の形状の面積(m2)を示す。Ω0は、検出すべき最小回転角速度(度/秒)を示す。]
(もっと読む)
光ファイバジャイロ
【課題】低速回転時でも精度よく回転角速度を求めることができる光ファイバジャイロを提供する。
【解決手段】本発明のジャイロは、環状の光ファイバ11と、光ファイバ11内を互いに逆方向に進行するレーザ光L1およびL2を発生させる半導体光増幅器12と、光ファイバ11からレーザ光L1およびL2を引き出す結合器13と、レーザ光L1をレーザ光L11とL12とに分岐する分岐器21と、レーザ光L2をレーザ光L21とL22とに分岐する分岐器22と、レーザ光L11とL21とを結合する結合器24と、レーザ光L12とL22とを結合する結合器25と、結合されたレーザ光L11およびL21とを検波するフォトダイオード26と、結合されたレーザ光L12およびL22を検波するフォトダイオード27とを備える。フォトダイオード26で検出される信号の位相と、フォトダイオード27で検出される信号の位相との差が、10°〜170°または−10°〜−170°の範囲にある。
(もっと読む)
コリオリジャイロ
本発明は、基材(5、22、24、26)と、少なくとも2つの個体構造体(61、62、63、64、500、600、700、800)と、ばね要素(例えば1、2、3、21、23、25)とから構成され、上記ばね要素(例えば1、2、3、21、23、25)によって、上記個体構造体(61、62、63、64、500、600、700、800)は上記基材(5、22、24、26)に連結すると共に互いにも連結しており、さらに、力伝播体(例えば514、614、714、814)とタップ(例えば534、634、734、834)とを備え、上記構成は、上記力伝播体(例えば514、614、714、814)によって励起できる少なくとも1つの励起モード(7)と、上記タップ(例えば534、634、734、834)によって測定できる少なくとも1つの検知モード(8)とを含むコリオリジャイロであって、上記励起モード(7)及び上記検知モード(8)は閉鎖型であり、これによって、製作公差を考慮する必要がない場合、加速度及び/または振動によって上記励起モード及び上記検知モードにおける外乱励起が引き起こされることがないコリオリジャイロに関する。  (もっと読む)
(もっと読む)
角速度検出装置
【課題】高性能の角速度検出装置を提供する。
【解決手段】励振素子13、コリオリ素子14を含む駆動部を、固定端を共有している少なくとも2本の振動方向と直交する方向に延びる固定梁12aによって浮揚し、振動させている。実装または、熱の変動によって基板が変形したとしても、固定梁と支持梁に発生する内部応力は小さく、共振周波数や振動振幅などの振動状態を一定に保つことができる。そのため、実装環境の変化にロバストな高性能角速度検出装置を得ることができる。
(もっと読む)
角速度センサ
【課題】支持構造を容易にでき、周波数温度特性が良好で、精度の良い角速度検出が可能
な角速度センサを提供する。
【解決手段】角速度センサは、回転Yカット水晶基板の主表面上にY’軸方向に突出され
X軸方向に延出された突起部を備え、この突起部の近傍の主表面上に駆動電極および検出
電極が形成されている。この駆動電極により水晶基板にX軸方向の厚みすべり振動を励振
させて突起部に振動を励起させる。そして、Y’軸回りの回転に対応して突起部の振動に
対して直交する方向に作用するコリオリ力により突起部が屈曲させられ変位する。この突
起部の変位が応力となって水晶基板に加えられ、この応力の変化が検出電極にて検出され
て角速度センサに加わる角速度を検出する。
(もっと読む)
半導体レーザジャイロ
【課題】干渉縞を用いることなく回転の角速度を求めることが可能な半導体レーザジャイロを提供する。
【解決手段】本発明の半導体レーザジャイロは、レーザ光Lを出射する半導体レーザ10と、レーザ光Lをモニタする光検出器50とを備える。半導体レーザ10は、活性層を含む層で構成されたキャビティーと、活性層にキャリアを注入するための第1および第2の電極とを備える。キャビティーは、活性層内の仮想の多角形の経路を周回するように光を反射することが可能な端面を備える。光検出器50で検出されたレーザ光Lの、RF帯域におけるスペクトルのピーク強度および/またはピーク周波数に基づいて回転角速度が求められる。
(もっと読む)
角速度センサ、角速度センサの製造方法及び電子機器
【課題】
正確に角速度を検出することができる角速度センサ、角速度センサの製造方法及び電子機器を提供する。
【解決手段】
第1のアーム2と第2のアーム3と第3のアーム4とが同一平面(XY平面)に配置されており、この平面に対して垂直方向(Z方向)に振動させるためにレーザー加工された陥没部30を第1のアーム2が備えている。このため、第1のアーム2をこの平面に対して垂直方向に振動させることができる。例えば、角速度センサ1に回転力が働いたときに、コリオリ力により第1のアーム2がこのXY平面に対して平行な方向(X方向)に振動するようにでき、圧電薄膜12の歪を正確に検出し、角速度を正確に検出することができる。
(もっと読む)
角速度センサ
【課題】振動子を支持する梁が基板からの熱応力により発生する引張り力を受け、振動子の共振周波数が変化することを抑制し、角速度の検出精度が向上した角速度センサを提供することにある。
【解決手段】角速度センサの検出素子1は、第1及至第4静電気力発生手段6〜9と、第1及び第2振動子10,11と、第1及び第2振動子10、11を弾性的に連結する弾性連結梁12と、第1〜第4静電容量検出手段13〜16とを有する。さらに、第1〜第4支持梁17,18,19,20は、第1及び第2振動子19,11の一方から片持ち梁構造で、第1及び第2振動子10,11をそれぞれX軸方向に変位し易く、Y軸及びZ軸方向に変位し難く支持する。
(もっと読む)
角速度センサ
【課題】圧電振動子を傾けて固定することなく、角速度センサの検出軸と、実際の回転が加わる軸との角度が大きくても精度の良い角速度を検出可能な角速度センサを提供する。
【解決手段】圧電振動片の振動を利用した角速度センサにおいて、角速度を検出する第1軸および該第1軸と直交する方向に設定された第2軸とを有し、第1軸の検出感度に対して第2軸の検出感度を15〜55%とした。このことで、本発明の角速度センサを取付角度が大きなナビゲーション装置に備えた場合、角速度センサの検出軸と、実際の回転が加わる軸との角度が40°までの取り付けにおいて、±15%以下の感度補正ですみ、この取付角度に起因する出力感度をソフトウェアに基づいた演算処理により補正をすることができる。
(もっと読む)
角速度センサ
【課題】センサ素子としての音叉状水晶片の配置精度を確実にして、角速度の検出精度を高めた角速度センサを提供すること。
【解決手段】少なくとも一対の音叉腕6が音叉基部5から長手方向に延出した音叉状水晶片1を有し、前記音叉腕には音叉振動を励振する駆動電極とコリオリの力に基づいた電荷を検出するセンサ電極とを有し、前記音叉基部の一主面には前記駆動電極及び前記センサ電極から延出した引出端子を有するセンサ素子1を備え、前記音叉基部を平面視矩形状とした容器本体の長手方向の一端側の音叉用台座7に固着して、前記引出端子をワイヤーボンディングによって導出してなる角速度センサにおいて、前記音叉基部には第1嵌合部10を設けて前記音叉用台座には第2嵌合部11を設け、前記第1嵌合部と前記第2嵌合部とを嵌合して、前記音叉状水晶片と前記容器本体との長手方向を一致させた構成とする。
(もっと読む)
慣性力センサ
【課題】本発明は、特に、航空機、自動車、ロボット、船舶、車両等の移動体の姿勢制御やナビゲーション等、各種電子機器に用いられる慣性力センサに関して、検出精度を高めることを目的とする。
【解決手段】慣性力センサを構成する駆動回路2を、センス素子1から出力されるモニタ信号11を1ビットデジタル信号にシグマ・デルタ変換して振幅情報を形成し、この振幅情報を予め決められた基準振幅情報と比較し、この比較情報を基にモニタ信号11を演算処理し、マルチビット信号に変換し、このマルチビット信号を所定の出力信号に変換し、駆動入力に出力するとともに、演算処理は、モニタ信号11より形成される矩形波信号と比較情報とを演算させる構成とした。
(もっと読む)
MEMS慣性センサの力再平衡およびパラメトリック増幅
【課題】時間変動再平衡電圧を使用して、レートバイアス誤差およびスケールファクタ誤差を低減するためのデバイスおよび方法を提供する。
【解決手段】MEMS慣性センサは、1つまたは複数のプルーフマス、各プルーフマスに隣接して配置される少なくとも1つのセンス電極、プルーフマスの直角位相に関連した運動およびコリオリに関連した運動を静電的に相殺するための複数のトルク電極、およびプルーフマス上にポンピング力を生成するための複数のトルク電極を含むことができる。デバイスのセンス軸に沿ったプルーフマスの直角位相に関連した運動および/またはコリオリに関連した運動を静電的に相殺するために、いくつかのトルク電極に力再平衡電圧が印加できる。スケールファクタを向上するために、プルーフマスのモータ駆動周波数の約2倍の周波数にあるポンピング電圧が使用でき、センス軸に沿ってプルーフマスをポンピングする。
(もっと読む)
移動方向特定装置、移動方向特定方法、移動方向特定プログラム及び電子機器
【課題】移動体の移動方向特定に要する時間を短縮する。
【解決手段】移動体2の角速度を検出する角速度検出部4が出力するデジタル検出信号Dx、Dy、Dzに基づいて前記移動体2の移動方向を特定する場合に、所定の計測期間Tkの間、前記角速度検出部4が出力するデジタル検出信号Dx、Dy、Dzを取得し、取得した前記デジタル検出信号Dx、Dy、Dzに基づいて、前記所定の計測期間Tkにおける角度データθx、θy、θzを求め、当該角度データθx、θy、θzに基づいて前記移動体2の移動方向を特定するようにした。
(もっと読む)
41 - 60 / 97
[ Back to top ]