
Fターム[2F105BB01]の内容
Fターム[2F105BB01]の下位に属するFターム
感度向上 (338)
ノイズ低減 (509)
安定化 (320)
ダイナミックレンジの拡大 (18)
Fターム[2F105BB01]に分類される特許
81 - 97 / 97
正味の抑制トルクを実質的にゼロにする位置の、ぶら下がりセンサコンポーネントからパラメタの値を得るピックオフセンサ
一例における装置のぶら下がりセンサコンポーネントは、パラメータに反応する。正味の抑制トルクを実質的にゼロにする位置の、ぶら下がりセンサコンポーネントから上記パラメタの値を得る1以上のピックオフセンサ。  (もっと読む)
(もっと読む)
加速度・角速度検出装置および加速度・角速度検出方法

【課題】 一つの装置で、加速度と角速度を検出する加速度・角速度検出装置では、まず、加速度による力と角速度による力の合力を求め、その合力から加速度と角速度を求めるが、加速度による力と角速度による力を分離するのに複雑な処理が必要であった。
【解決手段】 タイミング部17により出力する周波数波形を示す駆動信号の出力値が零近傍になったときに、変位検出部40の検出結果を抽出するためのタイミング信号をサンプリング部13に出力するとともに、該駆動信号の位相を略180度遅らせたタイミングでも、タイミング信号をサンプリング部13に出力する。そして、駆動信号が零近傍になったときに出力されるタイミング信号に基づいて検出された変位検出部40の検出結果と、該駆動信号の位相を略180度遅らせたタイミングで出力されるタイミング信号に基づいて検出された変位検出部40の検出結果を用いて、重錘体3に作用する加速度と角速度を求めるものである。
(もっと読む)
振動型ジャイロセンサおよびその製造方法

【課題】 振動子に与えられた角速度を駆動信号と検出信号の位相差に基づいて検出する振動型ジャイロセンサであって、振動子と検出素子とが正しい位置関係になっていない場合でも検出素子の正しい出力を得ることができ、したがって駆動素子と検出素子との位置合わせに高い精度を要さない振動型ジャイロセンサを提供する。
【解決手段】 複数の検出素子16を振動子12と離間して配置するとともに、角速度を求めるに当たり、振動子と複数の検出素子とが見かけ上で予め設定した所定の位置関係になるように、複数の検出素子の検出信号の演算処理を行う。
(もっと読む)
半導体発光素子、その製造方法およびその半導体発光素子を用いた半導体レーザジャイロ
【課題】 1.1μmよりも短波長な発光波長を有する半導体発光素子を提供する。
【解決手段】 半導体レーザは、活性層6を備える。活性層6は、6個の量子ドット層61と、5個の間隙層62とを含む。6個の量子ドット層61および5個の間隙層62は、交互に積層される。5個の間隙層62の各々は、ノンドープのGaAsからなる。そして、5個の間隙層62の各々は、30〜50nmの膜厚を有する。6個の量子ドット層61の各々は、量子ドット611とキャップ層612とからなる。量子ドット611は、InyAl1−yAs(y=0.5〜0.9)からなり、キャップ層612は、AlxGa1−xAs(x=0.0〜0.5)からなる。量子ドット611は、1.8〜2.4モノレイヤーのInyAl1−yAsを結晶成長することにより形成される。
(もっと読む)
振動型ジャイロセンサ
【課題】 振動型ジャイロセンサにおいて、製造コストを低減したり、性能、機能等を高めたりする。
【解決手段】 振動子10に与えられた角速度を駆動信号と検出信号の位相差に基づいて検出する振動型ジャイロセンサにおいて、同一の素子12を駆動素子および検出素子として共用する。あるいは、駆動素子および検出素子として互いに異なる動作原理により動作するものを用いるとともに、駆動素子および検出素子を同一方向を向いた平面に沿って設置したり、互いに反対方向を向いた平面に沿って設置したり、実質的に同じ場所に設置したりする。
(もっと読む)
ジャイロ信号処理装置
【課題】 従来ハイパスフィルタのコンデンサに起因していた回路の立ち上がり遅れ、揺り戻し現象、パンニング中の低周波の振れに対する補正機能の低下の無いジャイロ信号処理装置を提供する。
【解決手段】 信号の直流レベルを所定値に調整する。ハイパスフィルタのコンデンサの急速充電中にコンデンサの両端の電圧が略一致するように調整することにより、急速充電終了直後の電圧変動が発生しないので回路の立ち上がり時間が早くなる。また、信号の直流レベルを回路の基準電圧に略一致させることで、直流成分除去のためのハイパスフィルタが不要になり、揺り戻し現象およびパンニング中の低周波の振れに対する補正機能の低下がなくなる。
(もっと読む)
角速度センサ
【課題】 複数軸まわりの角速度を、高い応答性をもって検出する。
【解決手段】 重錘体40を、筐体内において所定の自由度をもって移動可能となるように支持した状態で、原点Oを中心としてXY平面内で円軌道41に沿って円運動させる。点Pxにおいて重錘体40がX軸を通過する瞬間に、重錘体40に対してZ軸方向に作用するコリオリ力Fcoを検出することにより、X軸まわりの角速度ωxを検出する。点Pyにおいて重錘体40がY軸を通過する瞬間に、重錘体40に対してZ軸方向に作用するコリオリ力Fcoを検出することにより、Y軸まわりの角速度ωyを検出する。XY平面に平行な主面をもつ可撓性基板の周囲を筐体に固定し、その中心部に重錘体40を固着する。可撓性基板にとりつけた圧電素子に電圧供給して重錘体40を円運動させ、圧電素子の発生電荷によりコリオリ力を検出する。
(もっと読む)
半導体レーザジャイロ
【課題】 新規な構造の半導体レーザを用いることによって、半導体レーザを用いた従来のジャイロよりも精度よく簡単に回転を検出できる半導体レーザジャイロを提供する。
【解決手段】 第1および第2のレーザ光を出射する半導体レーザと光検出器とを備え、光検出器は、第1および第2のレーザ光によって干渉縞が形成される位置に配置されている。第1のレーザ光35は、活性層26内において菱形の経路32上を周回するレーザ光(L1)の一部が出射されたレーザ光であり、第2のレーザ光36は、経路32上をレーザ光(L1)とは逆の方向に周回するレーザ光(L2)の一部が出射されたレーザ光である。レーザ光35および36が出射される端面26aは、所定の円柱の表面の一部と同じ曲面を有する。その円柱の半径R1は、対角線の長さLの0.4倍〜0.6倍の範囲にある。
(もっと読む)
ナビゲーション装置
【目的】自動二輪車などの旋回時のロール角が大きな移動体の位置を精度良く求めるこ
とができ、ジャイロセンサの学習機能の構築が容易なカーナビゲーション装置を提供する
。
【構成】ナビゲーション装置10は、移動体1に設置されるとともにジャイロセンサに
よって前記移動体1の旋回角速度ωを検知・算出する旋回角速度検知・算出手段18を備
えており、特に、この旋回角速度検知・算出手段18は、移動体1の正立状態における上
下方向(X軸方向)及び前後方向(Y軸方向)に対して左右方向(Z軸方向)において、
上下方向のX軸に対して互いに逆方向に同一角度θ1、θ2(θ1=θ2=θ0)傾けて
左右対称に設置された同感度の2つのジャイロセンサ2A、2Bと、2つのジャイロセン
サ2A、2Bのセンサ出力回路9、9と、センサ出力回路9、9の出力信号の変化x1、
x2から移動体1の旋回角速度ωを算出する演算手段と、を備える構成である。
(もっと読む)
容量性センサーおよび該容量性センサーを製造する方法
本発明は、物理的な測定に用いるための測定デバイス、とりわけ容量性センサーに関する。本発明によるセンサーでは、固定電極(3)、(4)、(12)、(17−20)、(27−28)の形状は、階段状にされる。本発明によって、改善された線形性を有する容量性センサーを製造する方法が達成されるとともに、とりわけ微小な容量性センサーソリューションに用いるのに適する容量性センサーも達成される。 (もっと読む)
弾球遊技機
【課題】遊技盤の正確な傾斜角度を数値として確認することができて、遊技盤の傾斜角の調整がし易い遊技機を提供する。
【解決手段】遊技球が流下可能な遊技領域Aを備える遊技盤18と、識別情報を表示可能な表示手段8とを備える遊技機において、傾斜測定装置Sが測定する遊技盤18の傾斜角を表示手段8に表示させることを特徴とする。さらに、傾斜センサ9にジャイロセンサを用いて、ジャイロセンサによって計測された遊技盤の正確な傾斜角を遊技機の表示手段8乃至外部機器26に表示する。
(もっと読む)
姿勢計測方法、姿勢制御装置、方位計及びコンピュータプログラム
【課題】 従来よりも短い時間で物体の姿勢又は真北を含む方位を計測することができる姿勢計測方法、姿勢計測装置、方位計及びコンピュータプログラムを提供する。
【解決手段】 本発明のカルマンフィルタの時間更新では、姿勢計測装置の姿勢をクオータニオンを用いて表した状態変数xの推定値xk(-)ハット及び誤差共分散Pk(-)は、時間に対して不変であるとして前ステップの観測更新で得られた値と等しいとする。また観測更新では、ジャイロ及び加速度センサを用いて互いに直交する各3軸回りの角速度及び各3軸方向の加速度を測定し、測定した角速度及び加速度の値を観測値zk として状態変数の推定値xk(+)ハット及び誤差共分散Pk(+)を計算する。誤差共分散が十分小さくなるまでカルマンフィルタの処理を繰り返し、姿勢を示す状態変数を得る。
(もっと読む)
カップリングバネを備えたMEMSジャイロスコープ
【課題】 カップリングバネを備えたMEMSジャイロスコープが開示される。
【解決手段】カップリングバネを備えたMEMSジャイロスコープは、基板の板面方向の垂直方向に沿って基板について相対移動可能な対称構造の複数質量体と、複数質量体との間に接続され、複数質量体のいずれか1つが所定の垂直方向に移動すれば、他方の1つを所定垂直方向と逆方向に移動させるカップリングバネとを含むことを特徴とする。
(もっと読む)
角速度センサ
【課題】 単純な構造で三次元の所定軸まわりの角速度を検出する。
【解決手段】 圧電素子520の上面に上部電極L1〜L4を形成し、下面に下部電極M1〜M4を形成した構造体を、XY平面に対して平行な主面を有する可撓基板510上に固着する。可撓基板510の下面には振動子550を設ける。上部電極L1〜L4および下部電極M1〜M4の間に所定位相の交流信号を供給することにより、振動子550をX軸方向に振動させた状態にする。その状態において、振動子550に加わるZ軸方向のコリオリ力による振動子550のZ軸方向への変位を、圧電素子520の両面に形成された図示されていない別な上部電極および下部電極間の電圧に基づいて検出し、検出した電圧をY軸まわりの角速度を示す値として出力する。
(もっと読む)
MEMS振動型慣性センサ用組込み試験
本発明は、慣性センサによって供給された、誤っているかまたは紛らわしいデータの識別を支援することにより信頼性改善を支援する、あるレベルの組込み試験を有するMEMS振動型慣性センサを提供する。試験信号がMEMS振動型慣性センサの1つまたは複数の入力に注入され、この試験信号は、1つまたは複数のMEMS振動型慣性センサ出力で試験信号成分を生成する。次いで、この試験信号成分が1つまたは複数の出力で観測される。この試験信号成分が、元の試験信号の少なくとも所定の特性と一致するなら、MEMS振動型慣性センサが適正に動作しており、誤っているかまたは紛らわしいデータを生成していないことがより有望である。実施形態には、試験信号が通常の機能動作中に供給され観測されるものがある。本発明は、慣性センサによって供給された、誤っているかまたは紛らわしいデータの識別を支援することにより信頼性改善を支援する、あるレベルの組込み試験を有するMEMS振動型慣性センサを提供する。例示の一実施形態では、試験信号がMEMS振動型慣性センサの1つまたは複数の入力に注入され、この試験信号は、1つまたは複数のMEMS振動型慣性センサ出力で試験信号成分を生成する。次いで、この試験信号成分が1つまたは複数の出力で観測される。この試験信号成分が、元の試験信号の少なくとも所定の特性と一致するなら、MEMS振動型慣性センサが適正に動作しており、誤っているかまたは紛らわしいデータを生成していないことがより有望である。実施形態には、MEMS振動型慣性センサの通常の機能動作中に試験信号が与えられて観測され、それによってセンサ稼動中の組込み試験を提供するものがある。 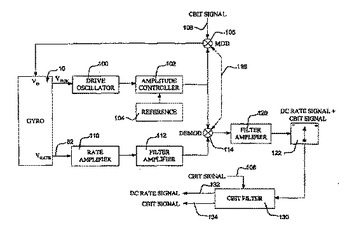 (もっと読む)
(もっと読む)
電子結合を持つ微小機械加工振動ジャイロスコープ、及び方法
一般的には、新しく、改良された微小機械加工振動ジャイロスコープ、及び方法を提供することが、本発明の目的である。本発明のもう1つの目的は、振動するマス間の機械結合を必要としない、上記の特徴のジャイロスコープ、及び方法を提供することである。  (もっと読む)
(もっと読む)
微細加工振動構造及び関連するマイクロ・ジャイロスコープ
本発明は、固定支持材(6)に接続された固定端(5)と、進行波又は定在波が生成される振動構造(4)の振動壁(7)を形成する、好ましくは側壁(7)を有する円筒形の中空シェルと、を備える微細加工振動構造(4)に関する。中空シェルは、振動構造(4)に関する固定端(5)を形成する基部と、自由端(9)とを備える。自然分離領域が、中空シェルの固定端(5)と自由端(9)の間に配置される。  (もっと読む)
(もっと読む)
81 - 97 / 97
[ Back to top ]