
Fターム[2F105BB20]の内容
Fターム[2F105BB20]に分類される特許
61 - 80 / 204
クローズドループ方式光干渉角速度計
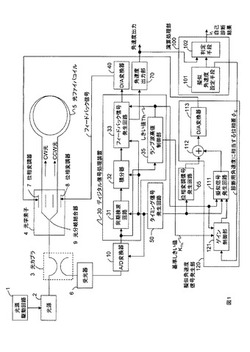
【課題】温度特性の良い自己診断機能を備えたクローズドループ方式光干渉角速度計を提供する。
【解決手段】位相変調信号に自己診断用の擬似角速度を重畳して位相変調器に供給する擬似角速度信号発生部を具備し、擬似角速度信号発生部は、ゲイン制御部と、擬似信号発生回路と、加算器と、D/A変換器とを備える。ゲイン制御部は、診断用に設定される角速度に相当する位相差としきい値と基準しきい値とを入力として、しきい値を基準しきい値で除したゲイン係数を、診断用の角速度に相当する位相差に乗じて診断用位相差として出力する。擬似信号発生回路は、階段状鋸歯状波の擬似角速度信号を生成する。加算器は、位相変調信号と擬似角速度信号とを加算する。D/A変換器は、加算器の出力信号をディジタル/アナログ変換して位相変調器に供給する。
(もっと読む)
物理量センサ及び物理量センサの制御装置

【課題】生産性を著しく低下させることなく、アクティブ診断制御の高信頼化と高機能化を両立する物理量センサを提供することにある。
【構成】角速度検出回路100は、物理量に応じて変位する可動部1を有しており、可動部の変位に応じて物理量(加速度)を検出する。アクティブ診断回路200は、角速度検出回路100の故障を診断する。第1判定手段201は、受信手段202により受信した指令コマンドに基づいて診断を実施するか否かを判定する。第2判定手段201は、受信した所定の情報に基づいて診断を実施するか否かを判定する。診断実行手段203は、第1判定手段201及び第2判定手段202の出力に基づいて診断を実行する。
(もっと読む)
ジャイロモジュール
【課題】小型化および高精度化したジャイロモジュールを提供する。
【解決手段】ジャイロモジュール10は、第1検出軸と第2検出軸とを有するジャイロ素子片30を2つ有している。この一方のジャイロ素子片30と他方のジャイロ素子片30とは、第1検出軸の検出感度極性を同じにするとともに、第2検出軸の検出感度極性を反転するように配置してある。そしてジャイロモジュール10は、各ジャイロ素子片30に接続して、各ジャイロ素子片30が出力した信号を加算する回路22および減算する回路24を備えている。比較手段26は加算する回路22の出力値と減算する回路24の出力値とを比較し、各値が同じになっている時間が予め設定した時間以上であれば警報手段28に警報発信号を出力する。
(もっと読む)
ジャイロモジュール
【課題】3軸の角速度検出を行えるジャイロモジュールを提供する。
【解決手段】3軸ジャイロモジュール10は、2つの検出軸を有する第1ジャイロ素子片12、第2ジャイロ素子片14および第3ジャイロ素子片110を有し、第2ジャイロ素子片14と第3ジャイロ素子片110の出力信号を減算して出力する第1演算回路112と、第2ジャイロ素子片14と第3ジャイロ素子片110の出力信号を加算して出力する第2演算回路114と、第1ジャイロ素子片12の出力信号と第1演算回路112の出力信号とを演算して出力する第3演算回路116とを備えている。第1ジャイロ素子片12の第1検出軸の伸びる方向と第2ジャイロ素子片14の第1検出軸の伸びる方向及び第3ジャイロ素子片110の第1検出軸の伸びる方向とが一致し、第1ジャイロ素子片12の第2検出軸の伸びる方向と第2ジャイロ素子片14の第2検出軸の伸びる方向とが交差する。
(もっと読む)
コリオリジャイロの動作状態のシミュレーション方法
本発明は、コリオリジャイロを特徴づける方法であって、力トランスミッタ、機械的共振子、及び、励起/リードアウト振動ピックオフを有する上記系の相互作用は、離散化された、微分方程式の連立方程式として表され、上記連立方程式の変数は、力トランスミッタによって機械的共振子に供給される力信号、および、励起/リードアウト振動ピックオフにより生成されるリードアウト信号を表し、上記連立方程式の係数は、リードアウト信号上に力信号をマッピングする一次変換に関連する情報を含んでおり、上記係数は、力信号値、及び、リードアウト信号値を異なる時に測定し、上記連立方程式にそれら力信号、および、リードアウト信号を代入することによって決定され、上記連立方程式は、上記係数に応じて数的に解かれ、上記係数は、コリオリジャイロの回転速度に悪影響を及ぼすコリオリジャイロの望まれないバイアス特性を推測するために用いられることを特徴とする。 (もっと読む)
角速度センサ
【課題】
周囲温度が変化しても、又は外乱振動が加わっても優れた精度で故障を検出する。
【解決手段】
基板上に弾性的に変位可能に支持された振動子と前記基板表面に水平な駆動軸方向に前記振動子を振動させる駆動手段と前記基板表面に水平かつ駆動軸方向と垂直な検出軸方向の前記振動子の変位を検出する検出軸方向変位検出手段と前記振動子の検出軸方向の変位に基づいて角速度を検出する角速度検出手段と駆動軸方向への前記振動子の振動が検出軸方向に漏れ込む事が原因で生じる前記振動子の自己振動を検出する自己振動検出手段と、前記振動子の自己振動をゼロにする自己振動帰還回路と、前記自己振動検出手段の出力を利用して異常を判定する異常判定手段とを有する角速度センサとで構成される。
(もっと読む)
角速度検出装置およびその製造方法
【課題】WT型の振動子を含んだ角速度検出装置において、振動子に接続された信号線の断線の判定できる技術を提供すること。
【解決手段】角速度検出装置が、振動子と、前記振動子が励振振動するように前記振動子を駆動する駆動回路と、前記振動子から互いに逆位相の2つの第1検出信号が取り出されるように前記振動子に電気的に接続された2つの信号線と、前記2つの信号線からの前記2つの第1検出信号を差動増幅して前記2つの第1検出信号に基づく第2検出信号を生成し、生成された前記第2検出信号から、コリオリの力に基づく角速度成分と、前記励振振動に基づく自己振動成分と、をそれぞれ抽出し、抽出された前記自己振動成分を後段の故障判定回路へ出力する検出回路と、を備えている。そして、前記検出回路から出力された前記自己振動成分の大きさを0からずらして設定するバランスチューニングが、前記振動子に施されている。
(もっと読む)
角速度センサ
【課題】本発明は、検出部の故障診断のために、振動子上に駆動部と検出部とは別の新たな手段を設けることなしに、シンプルな構成、かつ、小型で高精度な検出部の故障診断が可能な角速度センサを提供することを目的とするものである。
【解決手段】外部から故障診断を実施するためのチェック信号aが端子54に入力されるとアンプ45の増幅度が減少し、同時にAGC回路43の働きによりアンプ44の増幅度が逆に増加することで、音叉型振動子のアームの中心線を境に離間した一対の駆動電極の一方には小さな駆動信号が、他方には大きな駆動信号が印加されるように構成されている。
(もっと読む)
センサ信号検出回路、レシオメトリック補正回路及びセンサ装置
【課題】従来のセンサ信号検出回路では、非レシオメトリック特性を有する非レシオメトリック成分を含むセンサ信号のレシオメトリック特性を改善することができない問題があった。
【解決手段】本発明にかかるセンサ信号検出回路は、電源電圧変動に比例して電圧レベルが変動するレシオメトリック特性を有するレシオメトリック成分yinを含む第1のセンサ信号を受けて、第1のセンサ信号を増幅した第2のセンサ信号を出力する入力信号検出回路14と、第2のセンサ信号に重畳される非レシオメトリック特性を有する非レシオメトリック成分Xを予め設定された設定値に基づき補正して検出信号を出力するレシオメトリック補正回路11と、を有する。
(もっと読む)
MEMSデバイスにおけるソー・デブリの低減
【課題】MEMSデバイスの製造において、デブリを低減し、歩留まり、信頼性を向上させる。
【解決手段】改良されたMEMSデバイスおよび製造方法においては、チャネルが、先に第1の基板上に形成された複数のMEMSデバイス領域の周りの第1の基板に形成される。次いで、複数のシールリングが、形成されたチャネルの少なくとも一部の上で、複数のMEMSデバイス領域の周りに適用される。第2の基板は、第1の基板に取り付けられ、次いで、MEMSデバイス領域を取り囲むシールリングは、互いから離される。チャネルは、第1及び第2の断面領域を含む。第1の断面領域は、ソー・デブリ粒子がMEMSデバイス領域に入らないように寸法決めされる。
(もっと読む)
角速度検出回路、角速度検出装置及び角速度検出装置の故障診断方法
【課題】角速度の検出精度に影響を与えることなく故障診断精度を高めることができる角速度検出回路、角速度検出装置及び角速度検出装置の故障診断方法を提供すること。
【解決手段】本発明の角速度検出回路80は、振動子10の駆動電極102に駆動信号を供給する駆動回路20と、振動子10の検出電極112及び114に発生する信号に基づいて、角速度に応じた角速度検出信号32を生成する検出回路30と、を含む。駆動回路20は、故障診断モード時は、角速度疑似信号を生成し、生成した角速度擬似信号を前記駆動信号に重畳して振動子10の駆動電極102に供給する。検出回路30は、故障診断モード時は、振動子10の駆動電極102と検出電極112及び114の間の静電結合容量を介して角速度疑似信号が検出電極112及び114に伝搬した信号に基づいて、角速度検出信号32を生成する。
(もっと読む)
音叉型振動部品の特性検査装置、特性検査方法
【課題】音叉型振動部品の特性検査の精度の向上と、検査の高効率化を両立させる。
【解決手段】機械的に発振する音叉構造の振動子を有する音叉型振動部品の振動特性を検査する特性検査装置1であって、駆動モータによって回転テーブル10を回転させ、この回転テーブル10に周方向に間隔を空けて保持ユニット20を複数配置して、音叉型振動部品を保持するようにし、保持ユニット20のそれぞれに対応して回転テーブル10に発振回路30を設けるようにした。
(もっと読む)
ディジタルデータ補正プログラムおよびディジタルデータ補正装置
【解決手段】センサで計測した角速度をA/D変換器によって変換したディジタルデータがリモコンからゲーム機に送信され、ゲーム機のCPUがそのディジタルデータを補正する。つまり、CPUが、順次のディジタルデータをバッファに順次記憶させる。ステップS37で、最新のディジタルデータに対して各ディジタルデータが安定していると定義できる安定範囲(d1-d2)を算出し、ステップS49で、バッファに格納されたディジタルデータのうち、最新のディジタルデータから遡って連続して安定範囲内にあるディジタルデータの平均値を算出し、ステップS49で、その平均値を用いて最新のディジタルデータを修飾して修飾ディジタルデータを出力する。
【効果】ディジタルデータの精度向上と、追従性の向上が達成できる。
(もっと読む)
レートセンサ固定方法および固定作業支援システム
【課題】防振部材の厚さ寸法が異なる場合でもレートセンサを確実かつ効率的に固定する。
【解決手段】リング状に形成された防振部材17に、径の長さを異にして予め複数種用意された固定ネジ16群の中から選択された固定ネジ16を挿通し、防振部材17を固定ネジ16との間隙に充填した状態でレートセンサ1を固定した被測定物体5に対して外力を加えて振動させ、外力の情報及びレートセンサ1の検出値を振動時において取得し、取得された外力の情報および検出値を解析し、レートセンサ1の固定状態を固定ネジ16の径の長さと関連付けて評価する。そして、評価された固定状態に応じて径の長さが異なる固定ネジ16への交換を行わせる。
(もっと読む)
光ファイバジャイロ
【課題】ロックイン現象を抑制できる光ファイバジャイロを提供する。
【解決手段】本発明の光ファイバジャイロは、1本の閉じた光路20を構成する半導体光増幅器11と光ファイバ12とを備える。半導体光増幅器11によって光路20を互いに逆方向に進行する2つのレーザ光L1およびL2が励起される。レーザ光の波長における、光路内のすべての反射源の反射率の合計γは、以下の式(A)を満たす。
[式中、n0は前記光路の平均屈折率である。Lは前記光路の長さである。cは光の速度である。γ12は損失局在を特徴づける量である。gは半導体光増幅器と光ファイバとを含むリングレーザの実効利得を表す。ψは任意の角度を表す。]
(もっと読む)
慣性力センサ装置およびその起動制御方法
【課題】起動開始時における慣性力センサの破壊を防止する。
【解決手段】慣性力センサ10は、駆動信号Sdrが供給されて自励振動し自励振動に対応する振動信号Soscを出力するとともに外部から与えられた慣性力に応じてセンサ信号S10を出力する。駆動回路11は、振動信号Soscに基づいて駆動信号Sdrvを制御する。検出回路12は、センサ信号S10に基づいて慣性力を検出する。制御回路14は、駆動回路11を起動させる際、駆動回路11の動作パラメータを設定し、駆動回路11の動作パラメータの設定が完了した後に駆動回路11を起動させる。
(もっと読む)
慣性センサ
【課題】本発明は、慣性センサの小型化を実現することを目的とする。
【解決手段】そして、この目的を達成するために本発明は、駆動信号を出力する駆動回路部11Aと、駆動回路部11Aからの駆動信号が入力される検知素子12と、検知素子12から応答信号を取り出す検出回路部13Aと、検出回路部13Aからの応答信号が入力されるとともにこの応答信号をモニタ信号とセンス信号に分離する処理回路部14Aとを備え、駆動回路部11Aが前記モニタ信号に基づき前記駆動信号の振動振幅を調整し、駆動回路部11A、検出回路部13A、及び処理回路部14Aの内少なくとも1つに電気的に接続される故障診断回路15と、故障診断回路15からの故障検知信号と処理回路部14Aからのセンス信号とを時分割方式にてデジタル出力する出力回路部16とを設けたものである。
(もっと読む)
垂直方向に集積した電子回路およびウェハスケール密封包装を含むX−Y軸二重質量音叉ジャイロスコープ
角速度センサが、X−Y面内に横方向に配置され間接的にフレームに結合される2つの質量体を有する。2つの質量体は、それらがZ方向に沿って逆方向に必然的に移動するように、リンクによって連結されている。2つの質量体をZ方向の逆位相振動に駆動させ、それによってフレームに与えられる角振動の振幅を測定することによって、Y軸を中心とするセンサの角速度を検出し得る。好適な実施例では、角速度センサが、バルクMEMSジャイロスコープウェハー、キャップウェハー及び基準ウェハーから作製される。さらに好適な実施例では、このようなウェハーのアッセンブリが、質量体と周囲環境との間に気密バリヤを与える。 (もっと読む)
故障検知装置
【課題】 人工衛星に搭載する慣性基準装置のジャイロの故障有無を判断する際、一つのジャイロに故障が起きた場合、どのジャイロが故障しているのかについて、単純なジャイロ出力信号の比較のみでは検出することができず、故障していない正常なジャイロを取捨選択することが困難であった。
【解決手段】 斜交配置された複数のジャイロの出力信号から、3軸周りの各角速度を異なる演算処理で算出し、異なる演算処理で算出されたそれぞれの角速度の比較結果に基づく多数決処理によって、衛星形状や重心位置などのシステムパラメータを用いるような複雑な処理をすることなく、ジャイロ出力信号から故障したジャイロを特定することができる。
(もっと読む)
角速度センサ
【課題】1系統の検出手段で2軸回りの角速度を検出でき、システムの簡素化を図ることを可能にした角速度センサを提供する。
【解決手段】角速度センサは、支持基板と、検出用構造体101と、変位検出手段と、第1の駆動部102と、第2の駆動部103とを有する。検出用構造体は、支持基板に少なくとも一次元の自由度をもって可動に支持される。変位検出手段は、検出用構造体の一次元の自由度の方向への変位を検出する。第1の駆動部は、第1の軸回りの角速度155に対して、一次元の自由度の方向へ第1のコリオリ力153を発生せしめる第1の参照振動151を、検出用構造体の全体または一部分に励起する。第2の駆動部は、第2の軸回りの角速度156に対して、一次元の自由度の方向へ第2のコリオリ力154を発生せしめる第2の参照振動152を、検出用構造体の全体または一部分に励起する。
(もっと読む)
61 - 80 / 204
[ Back to top ]