
Fターム[2F105BB20]の内容
Fターム[2F105BB20]に分類される特許
41 - 60 / 204
電荷変化型センサの出力回路
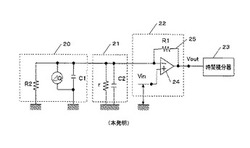
【課題】絶縁抵抗や入力インピーダンスによる測定誤差(感度低下)を低減するとともに、電荷変化型センサあるいはセンサケーブル回路の故障(断線、短絡)を検知できる電荷変化型センサの出力回路を提供する。
【解決手段】電荷変化型センサの出力回路は、電荷変化型センサの出力にセンサケーブルを介して接続する反転入力(−)と、基準電位Vinに接続する非反転入力(+)と、反転入力(−)に第1抵抗R1を介して接続する出力とを有するオペアンプ24と、電荷変化型センサの出力とグランドとの間に接続される第2抵抗R2とを備え、オペアンプ24は、電荷変化型センサが保有する電荷量ΔQに応じて変化する検出信号Voutを出力する。
(もっと読む)
慣性力センサ装置

【課題】2つの慣性力センサについて、従来よりも精度よく比較診断することができる慣性力センサ装置を提供する。
【解決手段】オフセット補正された第1角速度センサの検出値が車両が旋回中に取り得る所定値となるごとに、入力された2つの角速度センサの差分値ごとの検出回数を記憶し、記憶した検出回数から最も検出回数の多い差分値を抽出して、基準値と一致するか否かを判定する。基準値と一致しない場合、特性急変及び経時変化の故障がなければ、基準値を抽出値に書き換える。そして、基準値に基づいてオフセット補正後の第2角速度の検出値を補正するとともに、該補正値とオフセット補正後の第1角速度センサの検出値との差分値が所定の判定閾値を超えるとき、いずれか一方が故障であると判定する。
(もっと読む)
角速度センサ装置
【課題】本発明は、振動型のセンサ素子を用いた角速度センサ装置に関し、検出精度の向上を目的とする。
【解決手段】本発明はセンサ素子1とこれを制御する制御IC2とからなる角速度センサ装置において、センサ素子1に設けられる駆動手段5および検出手段6を電極で圧電体層7を挟み込んだ積層体で形成するとともに、一方の電極を駆動回路11或いは検出回路12に接続して他方の電極を制御IC2にて形成される基準電圧Vrefに接続した構成において、他方の電極から基準電圧Vrefに至る接続経路17に対する断線検知手段16を設けた構成とした。
(もっと読む)
リングレーザジャイロ
【課題】ロックイン現象によるミラーの損傷を回避する。
【解決手段】右回り及び左回りのレーザ光を発振させるキャビティ11に、機械的に回転振動を与えるディザ機構33が取り付けられているリングレーザジャイロにおいて、昇圧整流回路42を設ける。昇圧整流回路42はディザ機構33に取り付けられている圧電素子372が発生する電圧を用いてレーザ光を発振させるための放電維持用高電圧を生成する。回転振動が停止している状態ではレーザ発振しない。
(もっと読む)
電子機器
【課題】本発明は、自己診断機能を有する回路の小型化を実現することを目的とする。
【解決手段】そして、この目的を達成するために本発明は、AD変換器13のサンプリン
グ周波数を変化させる周波数可変回路15と、AD変換器13の出力信号に通過帯域を制限するフィルタ16と、フィルタ16を通過したAD変換器13の出力信号におけるノイズレベルの積分値を算出する出力電圧判定回路17と、を備え、AD変換器13のサンプリング周波数を前記フィルタ16における通過帯域外まで変化させることにより、AD変換器13の量子化ノイズレベルを変化させ、当該量子化ノイズレベルの積分値が所定の範囲内にあるか否かを前記出力電圧判定回路17において判定することにより自己診断を行う電子機器としたものである。
(もっと読む)
回転角度センサの校正方法
【課題】高い精度レベルで且つ複雑さを相当に少なくした、回転角度センサの校正方法の提供。
【解決手段】走査手段14は、回転子12の測度体を走査し、回転子12の回転角度位置に関連する実測角度値を発生させる。レーザジャイロスコープ18は、シャフト10の角速度を測定する。シャフト10の角速度に依存するレーザジャイロスコープ18からの信号が、回転角度に関して時間で積分され、基準角度値を得る。走査手段14からの実測角度値はこれらの基準角度値と比較され、その差から、実測角度値の各々に関連する修正変数が形成される。実測角度値及び実測角度値それぞれの関連する修正変数は、修正テーブルの形態で不揮発性メモリに保存される。回転角度の測定の間、実測角度値は、実測角度値の各々に関連する修正変数を用いて修正され、修正テーブル内に保存される。
(もっと読む)
振動ジャイロ
【課題】角速度感度軸に対して他軸感度によるノイズを発生させることなく、正確で高精度な角速度信号を検出する振動ジャイロの提供を目的とする。
【解決手段】振動子11,12と、この振動子11,12を制御する半導体部品20と、前記振動子11,12を支持してこの振動子11,12と前記半導体部品20を電気的に接続する回路部品40を含む支持基板30と、この支持基板30上に設けた前記振動子11,12、半導体部品20および回路部品40を覆う蓋体50から構成した振動ジャイロにおいて、前記支持基板30に前記振動子11,12を所定の感度軸方向に支持するための位置決め301,302を設けた。
(もっと読む)
振動型物理量センサ
【課題】振動型角速度センサの錘部および梁部の振動のQ値を低減する。
【解決手段】パッケージと、前記パッケージに底面が接合される環状の支持部と、前記支持部の内側に位置する錘部と、前記支持部の上部と前記錘部の上部とを連結する梁部と、前記梁部に形成される駆動用圧電素および検出用圧電素子と、前記支持部の上部と前記錘部の上部とを隔てるスリットが形成され前記支持部の上部と前記錘部の上部と前記梁部の全部とを構成する可撓層と、前記支持部の下部と前記錘部の下部とを隔てるとともに前記スリットに連通している環状の空隙が形成され前記錘部の下部と前記支持部の下部とを構成し前記可撓層より厚い不可撓層とを備え、前記支持部と前記錘部とを隔てる前記スリットの幅は、前記支持部と前記錘部とを隔てる前記空隙の幅よりも狭い、振動型角速度センサ。
(もっと読む)
移動環境における加速度計ベースの制御をサポートするための方法と装置
加速度計/ジャイロスコープベースの入力デバイスからの信号を処理する方法は、車両内に入力デバイスを設置することを含む。加速度計/ジャイロスコープベースの第二デバイスも車両内に設置される。入力デバイスは、車両が運動している間に手動で作動される。第一の信号が、手動で作動するステップに応答して入力デバイスから送信される。第二の信号が、車両の運動に応答して第二デバイスから送信される。第一の信号は、第二の信号に依存して調整される。 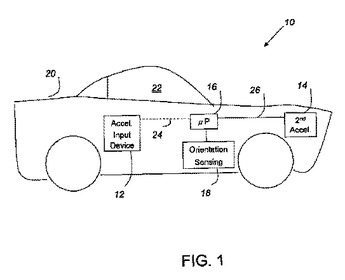 (もっと読む)
(もっと読む)
双音叉型振動片、振動型センサー素子および振動型センサー
【課題】引出電極の断線を防止することができ、高い信頼性を有する双音叉型振動片を提供する。
【解決手段】本発明に係る双音叉型振動片100では、引出電極112,122は、隣り合う領域のうちの、一方の領域の表面または裏面に形成された励振電極110,120から延出し、少なくとも二又に分岐して、分岐した一方の電極が他方の領域の一方の側面に形成された励振電極110,120と接続し、分岐した他方の電極が他方の領域の他方の側面に形成された励振電極110,120と接続し、引出電極112,122の励振電極110,120から延出している部分の幅の大きさは、領域の表面または裏面に形成された励振電極110,120の幅の大きさ以上である。
(もっと読む)
角速度センサ
【課題】時分割検出動作により3軸まわりの角速度を高い精度で検出する。
【解決手段】XY平面に広がる可撓性支持体の下面中央に振動子を接合し、上面に駆動用素子群と検出用素子群とを配したセンサ本体部300を用意する。動作信号発生器100により、振動子を前半周期にZ軸励振する駆動信号DrZと後半周期にX軸励振する駆動信号DrXを発生し、マトリクス変換器200を介して駆動用素子群に供給する。検出用素子群からの信号により、振動子の各軸方向の変位SΔx,SΔy,SΔzを検出し、これをスイッチSWを介して振動安定期のみAM検波器AMDおよび駆動信号に同期した同期検波器SDに与える。X軸振動の振幅Fxa,位相FxpとZ軸振動の振幅Fza,位相Fzpを動作信号発生器100へ帰還させ、フィードバック制御し、所定の同期検波器SDから出力される信号を3軸の角速度ωx,ωy,ωzとして出力する。
(もっと読む)
物理量検出装置並びに物理量検出装置の制御方法、異常診断システム及び異常診断方法
【課題】より信頼性の高い異常診断が可能な物理量検出装置並びに物理量検出装置の制御方法、異常診断システム及び異常診断方法を提供すること。
【解決手段】角速度検出装置1(物理量検出装置の一例)は、検出電極に、角速度(物理量の一例)の大きさに応じた検出信号とともに駆動信号(方形波電圧信号22)に基づく振動の漏れ信号を発生させるジャイロセンサー素子100(物理量検出素子の一例)と、駆動信号を生成する駆動回路20と、駆動信号に同期した検波信号34に基づいて、検出信号と漏れ信号を含む被検波信号36に対して同期検波を行う同期検波回路350と、制御信号64に基づいて、同期検波により漏れ信号の少なくとも一部が出力されるように、被検波信号36に対する検波信号34の立ち上がり及び立ち下がりの少なくとも一方の相対的なタイミングを変更する位相変更回路352と、を含む。
(もっと読む)
空間安定装置
【課題】従来の空間安定装置は、レンズとカメラとが一体に設けられているので、レンズ交換をする際に大幅な改造が必要となり、レンズ交換に必要な時間及び費用が大きくなっている。
【解決手段】本発明による空間安定装置は、カメラ3の前面に設けられたカメラ側アダプタ部3aに、レンズ側アダプタ部4aを介してレンズ4が着脱自在に取付けられる。また、カメラ支持部1の前面に設けられたレンズ支持部6は、カメラ支持部1と別体に設けられており、カメラ3に取付けられるレンズ4に応じて交換可能とされている。
(もっと読む)
センサおよびセンサを動作させる方法
測定量を測定するためのセンサ(100,200)であって、当該センサはセンサ信号(S)を生成し、当該センサ信号は駆動周波数(fx)で振動し、前記センサ(100,200)はレート復調器(135)と、直交復調器(140)と、評価回路(170)とを有しており、前記レート復調器(135)は、第1の変調信号と乗算することによって前記センサ信号(S)を復調し、これによって、当該センサ信号(S)からレート信号(R1)を形成し、当該レート信号内には、測定されるべき測定量に関する情報が含まれており;前記直交復調器(140)は、前記センサ信号(S)を、前記第1の復調信号に対して90°ずらされた第2の復調信号と乗算することによって復調し、これによって当該センサ信号(S)から、直交信号(Q1)を形成し;前記評価回路(170)は、前記直交信号(Q1)または当該直交信号から導出された信号(Q2)が、周期的な振動の影響を受けているか否かを判断し、周期的な振動が存在している場合には、目下のレート信号(R1)が、前記センサ(100,200)に作用する外部ノイズによって影響されていることを示す値を有する状態信号(Xst)を出力する。  (もっと読む)
(もっと読む)
ヨーレートセンサのためのセルフテスト
本発明は、可動質量体構造部(12)と駆動要素(13)と評価要素(15)とを含み、前記駆動要素(13)は可動質量体構造部(12)を運動(14)中にずらす及び/又は保持するように適合化され、前記評価要素(15)は、角速度(Ω)に対する可動質量体構造部(12)のリアクション(40)を検出するように適合化されたヨーレートセンサに関する。本発明による方法では、検査信号(42)の処理方向(45)に関連して、応答信号(47)の読出しが、検査信号(42)の給電箇所(48)と、可動質量体構造部(12)のフィードバック箇所(49)との間で行われる。  (もっと読む)
(もっと読む)
角速度センサモジュール
【課題】リードフレームに搭載された角速度センサの応力を低減可能な角速度センサモジュールを提供する。
【解決手段】角速度センサモジュールは、矢印DR1方向および矢印DR2方向を含む平面の方向に延在するリードフレーム30と、リードフレーム30上に搭載される角速度センサ10およびASIC素子20と、外部端子60とを備える。角速度センサ10は、角速度センサモジュールにおける矢印DR1方向の端部に位置するように設けられる。外部端子60は、角速度センサモジュールにおける矢印DR1方向の中央部に偏在するように設けられる。
(もっと読む)
物理量検出装置
【課題】故障の有無を判定するだけでなく、故障箇所をある程度特定することができる物理量検出装置を提供すること。
【解決手段】角速度検出装置1(物理量検出装置の一例)は、振動子100、駆動回路20、検出回路30、電圧判定回路50a、50b、故障判定回路60を含む。駆動回路20は、駆動信号を生成して振動子100に供給する。検出回路30は、振動子100の出力信号に基づいて、角速度(物理量の一例)に応じた検出信号を生成する。電圧判定回路50a、50bは、それぞれ、駆動回路20の入力信号又は出力信号の電圧レベル及び同期検波回路35の入力信号の電圧レベルが正常か否かを判定する。故障判定回路60は、電圧レベルが正常でないと判定した電圧判定回路50a又は50bに応じて異なる電圧レベルの信号を生成し、外部出力端子17を介して外部へ出力する。
(もっと読む)
物理量検出装置
【課題】故障の有無を判定するだけでなく、故障箇所をある程度特定することができる物理量検出装置を提供すること。
【解決手段】角速度検出装置1(物理量検出装置の一例)は、振動子100、駆動回路20、検出回路30、電圧判定回路50a、50b、故障判定回路60を含む。駆動回路20は、駆動信号を生成して振動子100に供給する。検出回路30は、振動子100の出力信号に対して検波処理を行う同期検波回路35を有し、同期検波回路35の出力信号に基づいて角速度(物理量の一例)に応じた検出信号を生成する。電圧判定回路50a、50bは、それぞれ、駆動回路20の入力信号又は出力信号の電圧レベル及び同期検波回路35の入力信号の電圧レベルが正常か否かを判定し、判定結果を示す信号が外部出力端子18を介して外部に出力される。故障判定回路60は、電圧判定回路50a、50bの判定結果に基づいて、角速度検出装置1が故障しているか否かを判定する。
(もっと読む)
角速度センサの感度測定装置
【課題】簡単な機構で短時間のうちに角速度センサの感度測定を可能とする角速度センサの感度測定装置を提供すること。
【解決手段】角速度センサ301のセンサ部を取り付ける保持部材306と、この保持部材306を搭載する振動テーブル302と、この振動テーブル302に第1の振動方向の振動を与える振動発生器303とを備えている。振動発生器303による第1の振動方向が、センサ部の重錘体104に与える第2の振動方向と一致しないようになっている。また、第1の振動方向が、角速度センサが検出する角速度の方向及び角速度センサ301が角速度を検出するために重錘体104に与える振動方向のどちらとも一致しないようにするとともに、第1の振動方向の振動周波数を、第2の振動方向の振動周波数と一致させるようになっている。
(もっと読む)
加速度または角速度センサの自己診断装置および自己診断方法、加速度または角速度センサ、ならびに加速度または角速度センサの初期設定方法
【課題】自己診断中に加速度または角速度センサに外部から衝撃が加わった場合でも、正確な自己診断を行なうことが可能な加速度または角速度センサの自己診断装置を提供する。
【解決手段】加速度センサ1の自己診断装置10は、診断制御部13と、積分演算部11と、判定部12とを備える。診断制御部13は、加速度または角速度を検出するセンサ本体8に所定の大きさの擬似加速度信号14を印加することによって、センサ本体8に擬似的な加速度または角速度を与える。積分演算部11は、擬似加速度信号14に応答してセンサ本体8から出力されたセンサ信号17の積分演算を行なう。判定部12は、積分演算が開始されてから所定の積分時間が経過したときの積分値18が、所定の正常範囲にあるか否かを判定する。
(もっと読む)
41 - 60 / 204
[ Back to top ]