
Fターム[2F112BA09]の内容
Fターム[2F112BA09]の下位に属するFターム
小型、軽量化 (154)
部品点数の削減 (43)
組立及び調整(校正)の工数削減 (98)
Fターム[2F112BA09]に分類される特許
1 - 20 / 84
3次元計測システム及び3次元計測方法
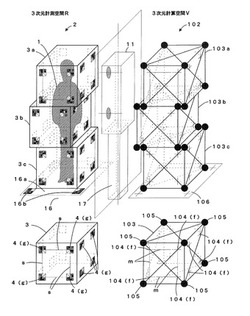
【課題】外部標定の容易なステレオ撮影による3次元計測システム及び3次元計測方法を提供する。
【解決手段】3次元計測システムは、測定対象物1を複数方向から撮影してステレオ画像20を得るステレオ撮影部11と;測定対象物の全体をカバーする基準体2の一部を構成する、複数の基準マーク4を有するサブ基準体3と;ステレオ撮影部で撮影して得たステレオ画像に基づくサブ基準体が有する複数の基準マークの3次元座標値の撮影測定値fと予め基準計測された基準測定値gとを含む、基準体の3次元数値解析モデルである基準体モデル102を3次元計算空間V中に一体として画成する基準体情報画成部12と;基準体モデルを用いてステレオ撮影部の外部標定要素を算出する標定要素算出部13と;外部標定要素により定位されたステレオ撮影部により撮影される測定対象物のステレオ画像から測定対象物の3次元計測をおこなう3次元計測部14とを備える。
(もっと読む)
距離画像生成装置および距離画像生成方法

【課題】光飛行型距離画像生成装置によって撮影空間の距離画像生成する際、同一撮影空間内に同時期に複数の光飛行型距離画像生成装置が存在する場合であっても、精度良く測距を行う。
【解決手段】光源から照射する変調光の発光(ON)期間と、電荷蓄積部の各単位蓄積部における電荷の蓄積期間とを一定としながら、変調周期毎に周期の長さを変化させるよう、発光と蓄積とを制御する。周期の長さは、予め定めた固定の変調周期Tsに、周期毎に異なる付加時間を付加することにより変化させる。そして、付加時間中に取得した電荷は廃棄する。
(もっと読む)
物体検出装置を搭載する移動体
【課題】演算コストがより低い物体検出装置を搭載する移動体を提供すること。
【解決手段】本発明に係るショベル60に搭載される物体検出装置100は、2つのカメラのそれぞれが撮像するカメラ画像の視差に基づいて物体を検出する。物体検出装置100は、被撮像空間を通る仮想直線上の複数の検査点のうちの1つに対応する画素を含む部分画像をカメラ画像から抽出する部分画像抽出部10と、同一の検査点に対応する各カメラ画像の部分画像同士の類似度に基づいて検査点に関する評価値を決定する評価値決定部11と、評価値決定部11が決定する評価値を用いて物体の存否を判定する物体存否判定部12とを備える。仮想直線は、ショベル60が動いたときにショベル60の一部が到達可能な空間領域を通る。
(もっと読む)
レーザ測距装置
【課題】簡易な構成により、測距誤差を補正する。
【解決手段】レーザ送受信部(レーザ光走査部103と受信部104)は、既定の位置に設置され、既定の測距対象面に既定の仰角にて対向し、出射角度を変化させながら測距対象面にレーザ光を出射し、反射光を受光する。基準反射板6は、レーザ光が照射される位置に配置され、レーザ光を反射する。位相検波器9は、反射光に基づき、測距対象面においてレーザ光を反射した各反射点での位相値を検出するとともに、基準反射板6での位相値を検出する。距離補正装置11は、レーザ送受信部と測距対象面との位置関係と、レーザ送受信部の仰角と、各々のレーザ光出射時の出射角度とに基づき、各反射点での位相値を算出し、位相検波器9により検出された各反射点での位相値と基準反射板6での位相値と、算出した各反射点での位相値とを用いて、補正値を算出する。
(もっと読む)
距離測定装置およびそれを備えた輸送機器
【課題】対象物までの距離を高い精度で測定することが可能であるとともに低コスト化が実現された距離測定装置およびそれを備えた輸送機器を提供する。
【解決手段】距離測定装置から対象物に光が発射される。受光部により発射光および対象物からの反射光が受光され、発射光パルスPeおよび反射光パルスPrを含む受光信号REが出力される。受光信号REに基づいて発射光の受光時点および反射光の受光時点が検出される。発射光の受光時点から反射光の受光時点よりも後の時点teまで一定の電圧を維持する第1矩形波信号LS1が生成され、第1矩形波信号LS1が積分される。反射光の受光時点から時点teまで一定の電圧を維持する第2矩形波信号LS2が生成され、第2矩形波信号LS2が積分される。第1矩形波信号LS1の積分結果と第2矩形波信号LS2の積分結果との差に基づいて対象物までの距離が算出される。
(もっと読む)
目標距離検出装置
【課題】従来、目標を検出したときの見下ろし角により目標寸法に誤差が発生していた。
【解決手段】画像センサで得られた目標画像を表示すると共に、その表示画像から測距対象の目標寸法の指定が可能な操作表示器と、複数種類の目標の目標寸法を格納した目標寸法テーブルと、操作表示器で指定された目標の種類に基づいて目標寸法テーブルから目標寸法を検索する目標寸法検索器と、目標寸法検索器で検索された目標寸法を画像センサの首振り角で換算して目標寸法換算値を出力する目標寸法換算器と、目標寸法換算値と、画像センサが出力する画像の総画素数と、目標が占有する縦方向又は横方向の画素数とから、前記画像内の目標が存在する位置における目標面表示範囲を算出する目標面表示範囲算出器と、目標面表示範囲と画像センサからの画角とから目標までの距離を算出する距離算出器を備える。
(もっと読む)
光学走査プローブ
【課題】対象物を光ストライプで照射し、対象物表面から反射した光を検出することで、対象物の表面上の複数の点からデータを捕捉するための走査プローブを提供する。
【解決手段】走査プローブは、(a)光ストライプを生成および発するためのストライプ生成手段14、(b)対象物表面から反射した光ストライプを検出するための画素の配列を有する画像センサを備えるカメラ16、(c)カメラ16によって検出された強度に応じて、フレームの取得中に光ストライプの強度を調節するための手段を備える。ストライプ長を修正する手段、処理手段のための隔離された区分室、およびスキャナのための取り付け可能なダストカバーを有するスキャナにも関する。
(もっと読む)
測距装置
【課題】簡素な構造で複雑な付加演算を必要とせず、高速応答可能で、かつ、スポット欠けによる誤測距を回避できる測距装置を提供する。
【解決手段】距離算出部20は、光スポットプロファイル算出部11から出力されたプロファイルに基づいて、受光素子4上の光スポットの位置を求め、この光スポットの位置に基づいて、受光素子4から測距対象物5までの距離を算出する。エラー検出部21は、光スポットプロファイル算出部11から出力されたプロファイルに基づいて、光スポットの形状を数値化し、この数値化された数値と予め定められた閾値とを比較して、この数値が予め定められた条件に従わないと、エラー信号を出力する。
(もっと読む)
画像処理装置
【課題】輝度のみならず被写体の表面微細凹凸の3次元情報までを高精細に再現できる小型で実現可能な画像処理装置を提供する。
【解決手段】偏光面制御素子106は、偏光板と液晶素子から構成されており、電圧により非偏光を任意の偏光面の直線偏光と変換できる。同期装置112は、偏光面制御素子106に偏光面回転の指示を送り照明の偏光面を回転させ被写体に照射すると同時に撮像素子110に撮影開始信号を送って映像を取得し、これを複数回実施する。撮像映像の信号は映像信号線111を経由して視差画像処理部108Aおよび輝度変動処理部108Bに送られる。視差画像処理部108Aでは、左右の偏光開口と中心に位置する非偏光部と通過する画像である各LL、画像RRCCを分離生成する。輝度変動処理部108Bでは、輝度値の変動を処理し、2回反射画像RTIMGを生成する。画像融合部121では、高感度の左右複数視点画像を生成して立体表示部122に送る。
(もっと読む)
画像処理装置および画像処理方法
【課題】高密度の視差情報の導出を安価な低処理能力の計算機で実現する。
【解決手段】画像処理装置120は、現在より過去における1または複数回分の視差を示す視差情報を保持するデータ保持部152と、光軸を異にして撮像された2つの画像データを取得する画像取得部150と、2つの画像データのうち予め定められたいずれか一方の画像データの任意の画像位置における基準部分画像に対応する、他方の画像データの対応部分画像の探索範囲を、任意の画像位置に関連付けて保持された過去における視差情報に示された視差に基づいて決定する探索範囲決定部160と、決定された他方の画像データの探索範囲から対応部分画像を探索する部分画像探索部162と、任意の画像位置と探索された対応部分画像の画像位置とから視差を導出し、視差を示す視差情報を、任意の画像位置に関連付けてデータ保持部に保持させる視差導出部164とを備える。
(もっと読む)
測距装置、侵入者監視装置、距離計測方法、及びプログラム
【課題】
測距装置において、簡単な構成により、物体の画像からその物体までの距離を測定する。
【解決手段】
撮影手段2と、撮影手段2の撮影視野を投光する投光手段3と、制御部5と、を有し、制御部5は、投光手段3により投光しないときの被測定物の画像(無投光画像)と投光したときの画像(投光画像)とを取得し、無投光画像の輝度値と、無投光画像と投光画像との輝度差から、撮影手段2から被測定物までの距離を算出する。
(もっと読む)
三角測距方式の距離検出回路
【課題】三角測距によって遠距離から近距離までの広範囲な距離測定を行う場合に、特に高精度な部品を使用することなく簡単な構成でS/N比を上げるためのダイナミックレンジを確保しつつ、特性ばらつきの影響も受けにくくして距離測定精度の向上を可能とした三角測距方式の距離検出回路を提供する。
【解決手段】スポット光の入射位置に応じたN側信号およびF側信号がそれぞれ出力される光位置センサ(1次元PSD11)と、N側信号またはF側信号のいずれか一方を増幅する第1増幅器(増幅器12)と、N側信号およびF側信号を差動増幅する第2増幅器(差動増幅器20)と、第1増幅器および第2増幅器の各出力に基づいて距離を算出する距離算出部(CPU21)とを備える。
(もっと読む)
レーザスキャナ及びその製造方法
【課題】レーザスキャナにおいて角度の監視を簡単且つ確実に行うことができるようにする。
【解決手段】監視領域20にある物体を検出するためのレーザスキャナ10であって、発射光線16を出射するための発光器12、前記発射光線16を前記監視領域20へ向けて周期的に偏向させるための回転可能な偏向ユニット18、監視領域20にある物体により拡散反射された光線22から検出信号を生成するための受光器26、及び、角度単位形成体32を有し、前記偏向ユニット18の角度位置を検出できる角度測定ユニット32、34、38を備えるレーザスキャナ10において、前記偏向ユニット18を前記角度単位形成体32と一体的に構成する。
(もっと読む)
測定装置
【課題】ラインセンサにより高さのみ及び高さと変位の両方を高精度に測定することができ、設置作業が容易な測定装置を提供する。
【解決手段】測定装置において、5つ以上の高さ方向の絶対座標が分かるキャリブレーションターゲット2と、前記キャリブレーションターゲット2の画像を撮像し、撮像した画像の画像信号を出力するラインセンサ1と、前記画像信号に基づき画像情報を作成する入力画像作成部と、前記画像情報に基づきターゲット座標を検出するターゲット検出部と、前記ターゲット座標及び予め取得した絶対座標に基づきDLT法の係数を算出する係数算出部と、前記係数に基づき前記ラインセンサ1の姿勢を計算する姿勢計算部と、前記係数に基づき前記ラインセンサ1の焦点距離を計算する焦点距離計算部と、前記係数に基づき前記ラインセンサ1の位置を計算する位置計算部とを備えた。
(もっと読む)
三次元及び色彩検出における電荷管理のための方法及び装置
【課題】距離計、画像マッピング、三次元画像キャプチャ、及び人間の色感覚によって限定されない色感覚での画像のキャプチャを含み得る三次元応用例に適したCMOS実装可能な画像センサ、及び、そのような検出器の検出特性を改善する。
【解決手段】オンチップ測定情報を、順番にではなく、ランダムに出力することができ、三次元画像を必要とするオブジェクト追跡、及び他の情報のためのオンチップ信号処理を、すぐに遂行することができる。システム全体は小さく、強固で、かなり少ないオフチップの別個の構成要素を必要とし、かつ、検出信号特性の改善を示す。オンチップ回路は、そのようなTOFデータを使って、場面内の一つのオブジェクト、又は全てのオブジェクト上の全ての点の距離及び速度を、同時に、容易に測定することができる。オンチップ回路はまた、検出センサ内の各画素における検出画像の分光組成を特定することができる。
(もっと読む)
三次元及び色彩検出における電荷管理のための方法及び装置
【課題】距離計、画像マッピング、三次元画像キャプチャ、及び人間の色感覚によって限定されない色感覚での画像のキャプチャを含み得る三次元応用例に適したCMOS実装可能な画像センサ、及び、そのような検出器の検出特性を改善する。
【解決手段】オンチップ測定情報を、順番にではなく、ランダムに出力することができ、三次元画像を必要とするオブジェクト追跡、及び他の情報のためのオンチップ信号処理を、すぐに遂行することができる。システム全体は小さく、強固で、かなり少ないオフチップの別個の構成要素を必要とし、かつ、検出信号特性の改善を示す。オンチップ回路は、そのようなTOFデータを使って、場面内の一つのオブジェクト、又は全てのオブジェクト上の全ての点の距離及び速度を、同時に、容易に測定することができる。オンチップ回路はまた、検出センサ内の各画素における検出画像の分光組成を特定することができる。
(もっと読む)
距離センサ
【課題】距離センサにおいて、簡単な構成により、処理する信号の周波数帯域を抑えることによる低コスト化と測定精度の向上または維持を図る。
【解決手段】距離センサ1は、第1、第2の周波数の信号を生成する第1、第2のシンセサイザ11,12と、第1の周波数の信号を第2の周波数でサンプリングしてスタート信号を出力するサンプルホールド回路3と、第1の周波数でパルス化した信号波を送信する投光器4と、反射して戻ってくる信号波を受信して受信信号を出力する受光器5と、受信信号を第2の周波数でサンプルホールドした信号に基づいてストップ信号を生成して出力する比較判断回路6と、スタート信号の出力からストップ信号の出力までの経過時間に基づいて対象物Mまでの距離を演算する計数演算器7とを備える。比較判断回路6は、等価サンプリングとサンプルホールドとにより、システムの低速動作が可能とされる。
(もっと読む)
距離測定装置
【目的】簡単な操作で測定対象物間の間隔や測定対象物の高さを測定できる距離測定装置を提供する。
【構成】レーザ光を出射する発光部20と、発光部20からの出射光をターゲット5に照射する対物レンズ14と、ターゲット5からの反射光を受光レンズ15を介して受光する受光部25と、受光部25で受光された反射光に基いてターゲット5までの距離を求める距離計算部41Aとを備えている距離測定装置1において、2つのターゲット5a,5bに対する視野角を設定する視野角設定部(回転リング31、回転位置検出ポテンショメータ32及び角度計算部33)を設けるとともに、この視野角設定部で設定された視野角と距離計算部41Aで求められた距離測定結果とに基いて2つのターゲット5a,5b間の距離を演算する間隔計算部41Bを設けた。
(もっと読む)
視差センサ、及び視差画像生成方法
【課題】壁などの広い平面等を含む対象物であっても、簡単な照明装置のみで照度変化に関する特徴量を十分大きくすることができ、対象物を確実に検知することができる視差センサ等を提供する。
【解決手段】第1画像及び第2画像の撮像方向に広い平面等を含む対象物がある場合に、その対象物に対して第1画像及び第2画像の間で視差が生じる方向に照度が変化している照度分布を有する光を照射している状態で、パルス信号比較回路が、隣接する電圧・パルス幅変換回路が出力する2つのパルス幅画素信号を比較し、2つのパルス幅画素信号の+方向の差と−方向の差とをそれぞれ比較パルス信号として出力する。
(もっと読む)
撮像装置
【課題】光路長を長く取る必要がなく、スペース効率を向上でき、搭載機器の低背化、小型化を図ることが可能で、簡易な構成による被写体距離推定を行うことが可能な撮像装置を提供する。
【解決手段】撮像レンズ11と、撮像レンズ11を通過した被写体像を撮像する画素を二次元配列した撮像素子13と、撮像レンズ11と撮像素子13との間に配され、画素に一対一対応で複数種類の大きさの開口を設けた遮光マスク13と、撮像素子12から得られた画像データを処理・解析する距離推定部15と、を有し、距離推定部15は、撮像素子12上の近接する画素で前記対応する開口の大きさが異なるもの同士の信号の比較をして距離を推定する。
(もっと読む)
1 - 20 / 84
[ Back to top ]