
Fターム[2F112FA31]の内容
Fターム[2F112FA31]の下位に属するFターム
Fターム[2F112FA31]に分類される特許
1 - 20 / 49
画像処理装置、方法、プログラムおよび記録媒体
【課題】測距精度に影響する視差方向のパラメータのキャリブレーション精度を高め、ステレオカメラの測距精度を向上させる画像処理装置、方法、プログラムおよび記録媒体を提供すること。
【解決手段】本発明の画像処理装置は、ステレオカメラが撮影した撮影画像対を取得し、変換情報を使用して撮影画像対を平行化して、その対応点を探索する。そして、当該対応点を使用して撮影画像対の視差値を算出し、変換情報の較正が必要と判断した場合に、ステレオカメラを構成するカメラの回転ずれを考慮した変換情報に較正する。
(もっと読む)
距離計測装置、距離計測方法、およびプログラム

【課題】計測時間の長時間化や特殊な撮像素子を用いることなく、アクティブ型の距離計測装置における輝度ダイナミックレンジを拡大する。
【解決手段】計測対象物に対して投影される計測用のパターン光の輝度値を、当該パターン光の二次元位置ごとに所定の輝度値範囲で変調させる変調部と、変調部により変調されたパターン光を計測対象物に対して投影する投影部と、投影部によりパターン光が投影された計測対象物を撮像する撮像部と、撮像部により撮像された撮像画像に基づいて計測対象物までの距離を算出する距離算出部と、を備える。
(もっと読む)
測距装置、侵入者監視装置、距離計測方法、及びプログラム
【課題】
測距装置において、簡単な構成により、物体の画像からその物体までの距離を測定する。
【解決手段】
撮影手段2と、撮影手段2の撮影視野を投光する投光手段3と、制御部5と、を有し、制御部5は、投光手段3により投光しないときの被測定物の画像(無投光画像)と投光したときの画像(投光画像)とを取得し、無投光画像の輝度値と、無投光画像と投光画像との輝度差から、撮影手段2から被測定物までの距離を算出する。
(もっと読む)
レーザ測量機
【課題】簡便に点群データ取得の高速化を可能にするレーザ測量機を提供する。
【解決手段】異なる波長のパルス測距光10a,10bを発する複数の発光源8a,8bを有する光源部2と、各波長毎に時分割して発光させるパルス駆動部9と、前記複数の波長のパルス測距光10a,10bを光軸13上に射出する投光部3と、前記光軸13上に設けられ、前記パルス測距光10a,10bの各波長のみを反射する反射面を複数有し、前記パルス測距光10a,10bを波長毎に分割して測定対象物に向ける様偏向する偏向部材11と、前記測定対象物からの反射測距光10a’,10b’を受光する1つの受光素子12とを有し、該受光素子12からの受光信号24から各パルス測距光10a,10b毎に測距を行う。
(もっと読む)
撮像装置
【課題】 被測定対象物までの距離を測距する測距装置を備えた撮像装置に関する。
【解決手段】 被写体を撮像する撮像光学系と、撮像光学系による光学像を電気信号に変換する撮像素子と、被写体までの距離を測定する測距センサと、測距センサへの電力の供給を制御する電力供給制御手段と、を備え、測距センサは、一つの半導体ウェハ上に形成された複数の素子であり、電力供給制御手段は、撮像装置に設定される動作条件に応じて、測距センサを構成する素子の電力を供給する撮像装置による。
(もっと読む)
距離取得装置
【課題】ステレオカメラで撮影したステレオ画像から、精度の高い距離測定を行うことができるとともに処理時間の短い距離取得装置を提供する。
【解決手段】ステレオカメラで撮影した複数のステレオ画像ペアを入力する画像入力手段8と、各画像ペアから視差を計算する複数の第一の視差検出手段11、12、13、14と、第一の視差検出手段により検出された視差が所定の範囲の場合に、前記視差検出に使用した画素を含む各画像ペアの一方の画像の領域において画素を補間する複数の画像補間手段と、前記画素補間された領域を使用して視差を計算する複数の第二の視差検出手段と、ステレオ撮像系の基線長に基づいて正規化する正規化手段と、正規化された視差を用いて視差類似評価を行う視差類似評価手段15と、距離検出手段16とを有し、視差評価において、視差検出1の結果と視差検出3の結果の二つだけを利用して視差評価を行う。
(もっと読む)
距離認識装置
【課題】自車から遠い位置の物体が撮影画像に含まれている場合に、自車から物体までの距離の認識精度の向上を図ることができる技術を提供する。
【解決手段】各エッジhEG,lEG,rEGに基づいて距離算出手段により算出された自車から物体までの距離Zに基づいて自車から物体までの距離が認識手段6eにより認識されるため、自車から遠い位置の物体が撮影画像Fに含まれているときに、各エッジhEG,lEG,rEGに基づいて距離算出手段6dにより算出される各距離Zが自車と物体との実際の距離とずれるおそれがある場合であっても、それぞれ異なる方法で算出される各距離Zに基づいて自車から物体までの距離Zが認識されるため、認識される距離が実際の距離Zから大きくずれることが防止され、自車から物体までの距離Zの認識精度の向上を図ることができる。
(もっと読む)
マルチフォーカス検査装置及びマルチフォーカス検査方法
【課題】 マルチフォーカス検査装置及びマルチフォーカス検査方法に関し、1回のスキャンで高速且つ高精度の全面外観検査を可能にする。
【解決手段】 測定対象物を撮像する測定ヘッドと、前記測定対象物と前記測定ヘッドを平面内において互いに相対的に移動させる移動機構と、前記測定対象物に光を照射する光源とを備え、前記測定ヘッドは、前記測定対象物に対向して配置された撮像レンズと、前記撮像レンズの合焦面が、前記測定対象物の移動方向に対して直交する平面内或いは前記直交する平面から±45°の範囲内で前記測定対象物の移動方向に傾斜させた平面内に存在するように調整する光学部材と、前記光学部材からの光の結像位置に焦点面が位置するよう配置したイメージセンサとを少なくとも有する。
(もっと読む)
距離画像入力装置と車外監視装置
【課題】画角が等しく、それぞれ異なる距離に焦点があった複数のステレオ画像ペアを取得して距離精度と位置精度が高い距離画像を検出する。
【解決手段】撮像装置2で被写体を撮像して、それぞれ異なる距離に焦点があった複数のステレオ画像を出力する。演算処理ユニット3の視差検出部13は撮像装置2から出力する各ステレオ画像の焦点が合う距離の範囲に基づいて視差を計算して視差情報を有する複数の視差画像を出力し、この複数の視差画像を視差合成部14で合成して合成視差画像を出力する。距離算出部15は視差合成部14から出力する合成視差画像から被写体までの距離を算出して距離画像を出力する。
(もっと読む)
距離画像取得装置及び距離画像取得処理方法
【課題】超短基線長のステレオカメラにおいて、距離測定精度の向上を図る。
【解決手段】略同一の複数のステレオ撮像系を用いて撮像される画像よりなる複数のステレオ画像ペアを抽出する画像キャプチャ手段と、複数のステレオ画像ペアから複数の視差画像を検出する視差検出手段と、複数の視差画像の各視差を、ステレオ撮像系の基線長に基づいて正規化し、正規化された視差(正規化視差)により、複数の視差画像の各視差の視差類似評価を行う視差評価手段と、複数の視差画像の、視差類似評価結果の正規化視差を用いて被写体までの距離を算出して、一つの距離画像を検出する距離検出手段を備える。
(もっと読む)
距離測定装置
【課題】距離測定装置に入射した光が前方の搬送台車からの反射光であるか否かを高精度で識別でき、誤検知による搬送台車の誤停止等を解消できる距離測定装置を提供する。
【解決手段】軌道に沿って走行する搬送台車の前部に、変調された測定光を平面状に走査する走査部と、走査部で走査された測定光と検出物からの反射光との時間遅れから検出物までの距離を算出する距離演算部とからなる測距装置を配置し、測距装置により前方を走行する搬送台車の後部に配置された再帰性反射部材からの反射光に基づいて搬送台車間の車間距離を検知する距離測定装置であって、走査部により走査された測定光の複数の走査角度と、距離演算部により算出された各走査角度に対応する距離と、各走査角度に対応する反射光の強度のうち、何れか二つの相関関係に基づいて、再帰性反射部材からの反射光であるか否かを識別する識別部を備える。
(もっと読む)
位置検出装置
【課題】処理の高速化及び装置の低コスト化を図りつつ、画像補正が行われた場合であっても高い位置検出精度を実現する。
【解決手段】一対の画像からなるステレオ画像に生じている光学的な歪みを部分的に異なる補正量で補正して補正ステレオ画像を出力する補正手段12L,13L,12R,13Rと、補正ステレオ画像のうちの一方を基準画像、他方を比較画像として、該基準画像内に設定される検出対象領域にマッチングする比較画像内のマッチング領域を探索する探索手段14と、探索手段14が探索に用いる検出対象領域のサイズを、基準画像中の当該検出対象領域を設定すべき位置における補正手段12L,13Lによる補正量に応じて変更するサイズ変更手段15と、基準画像内の検出対象領域の位置及び比較画像内のマッチング領域の位置から求まる視差に基づいて、撮影された物体の撮影地点からの距離を算出する距離算出手段16とを備える。
(もっと読む)
センサ校正装置、及び、センサ校正方法
【課題】距離画像センサ等の測距センサを適正に且つ簡便に校正する。
【解決手段】センサ校正ECU1は、車両VCの状態及びVC車両が位置している路面SRの状態の少なくとも一方に基づいて、距離画像センサ2が校正可能状態であるか否かを判定する校正可否判定部12、及び、校正可否判定部12によって校正可能状態であると判定された場合に、距離画像センサ2と該車両VCが位置している路面SRとの予め求められた距離(=基準距離)に基づいて、距離画像センサ2を校正する校正実行部13、を備える。
(もっと読む)
測距装置および測距方法並びにプログラム
【課題】位相シフト法を用いて測距を行う際に、誤測距を防止する。
【解決手段】照射部16が、強度が周期的に変化する縞パターン光を、パターンの位相をπ/2ずつ移動させつつ被写体に照射する。撮像部2が縞パターン光の移動の周期における0、π/2、π、3π/2の4つの位相において反射光を受光して受光信号F1,F2,F3,F4を得る。距離画像生成部31が、第1の加算信号(F1+F3)と第2の加算信号(F2+F4)との差分値の絶対値を算出し、絶対値をしきい値Th1と比較し、絶対値がしきい値Th1未満となる受光信号を取得した受光素子においてのみ距離情報D1を算出する。
(もっと読む)
画像処理装置、画像処理プログラム、および画像処理方法
【課題】マッチング処理時間を短縮し、高精度のマッチングを行う画像処理装置を提供する。
【解決手段】第1基準領域と第1参照領域とから画像信号と被写体の距離情報を抽出し、第1基準領域と第1参照領域との被写体距離差に基づいて、第1基準領域と第1参照領域とが類似するかどうか予備判定を行う。そして、予備判定によって、第1基準領域と第1参照領域とが類似すると判定した場合にのみ、第1基準領域と第1参照領域との類似性を示す値を算出し、マッチングを行い、第1基準領域と類似する第1参照領域を決定する。
(もっと読む)
測距装置、測距方法、測距プログラム又は撮像装置
【課題】被写体距離が空間変動する場合でも、高い精度で測距を行う。
【解決部】異なる撮影パラメータで撮影したぼけの異なる複数の画像間において、測距対象画素を含有する処理対象領域(k1、k2)毎に、ぼけの相関量を演算するぼけ相関量演算部(103)と、前記処理対象領域毎に演算したぼけの相関量から、前記処理対象領域毎に被写体距離を算出する被写体距離決定部(109)と、を有する測距装置であって、前記ぼけ相関量演算部(103)は、前記処理対象領域内の画素毎に、画素単位のぼけの相関量を演算する画素相関量演算部(106)と、前記処理対象領域内の画素毎に、前記画素単位のぼけの相関量の重み係数を設定する加重制御部(107)と、前記重み係数に基づいて、前記画素単位のぼけの相関量の加重平均を行い、前記加重平均の値を前記処理対象領域のぼけ相関量として演算する加重平均演算部(108)と、を備える。
(もっと読む)
動き補償を用いた画像の奥行き抽出のためのシステムおよび方法
画像の空間時間的奥行き抽出のためのシステムおよび方法が提供される。システムおよび方法は、シーンからの画像のシーケンスを取得し(502)、前記シーケンスは画像の複数の相続くフレームを含み、少なくとも一つのフレームについて、第一の画像中の少なくとも一つの点の第二の画像中の少なくとも一つの対応する点との視差を推定し(504、506)、前記第一の画像中の前記少なくとも一つの点の動きを推定し(605)、前記シーケンスの前方方向の少なくとも一つの前のフレームの推定された視差に基づいて、前記少なくとも一つの次の後続フレームの視差を推定し(508)、ここで、前記推定視差は推定された動きを用いて補償され、前記シーケンスの後方方向の少なくとも一つの前のフレームの推定された視差に基づいて、前記複数の相続くフレームのそれぞれの推定された視差を最小化する(512)ことを含む。 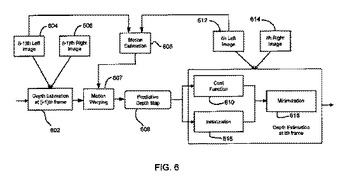 (もっと読む)
(もっと読む)
撮像装置、撮像方法、プログラム、記録媒体、および集積回路
【課題】距離を推定する撮像装置において、被写体の反射率推定値の精度を向上する。
【解決手段】
被写体に照明光を照射する照明発光部と、前記照明発光部の条件を変えて撮影すること
で、複数枚の画像を取得する撮像部と、前記複数枚の画像から前記照明光成分のみの画像
を取得する照明光成分取得部と、前記複数枚の画像および前記照明光成分のみの画像のう
ち、いずれかの画像から、照度ムラを除去して、各画素に対応する前記被写体の反射率を
推定する反射率推定部と、前記照明光成分のみの画像と前記被写体の前記反射率から各画
素に対応する前記被写体までの距離情報を推定する距離情報推定部と、を備える。
(もっと読む)
画像処理装置および方法並びにプログラム
【課題】少ない演算量により、相関ウィンドウのサイズを適切に設定できるようにする。
【解決手段】互いに異なる位置において被写体を撮影することにより取得した基準画像G1と参照画像G2とを取得し、被写体検出部30が、基準画像G1から所定被写体を検出する。基準画像G1と参照画像G2との間において、互いに対応する対応点を探索する際に使用される相関ウィンドウのサイズを設定するウィンドウサイズ設定部33が、基準画像G1における所定被写体を含む所定被写体領域内の画素と対応する対応点を探索するための相関ウィンドウWのサイズを、所定被写体領域のサイズに応じて設定する。
(もっと読む)
床面検出システム、移動ロボット及び床面検出方法
【課題】正確に床検出を行うことが可能な床面検出システム、移動ロボットや床面検出方法を提供すること。
【解決手段】本発明にかかる床面検出システムは、移動ロボット1に設けられている。まず、姿勢角センサ13の検出した姿勢角データに基づいて複数のセンサ角度候補を設定する。次に、複数のセンサ角度候補のそれぞれについて距離画像センサ12の検出した距離画像データに基づいて床検出を行う。そして、複数のセンサ角度候補のうち、最も多く床検出された候補を、当該床面に対する距離画像センサの角度として選択する。
(もっと読む)
1 - 20 / 49
[ Back to top ]