
Fターム[2F129BB06]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 絶対位置測位 (12,751) | ビーコン (507) | 光 (91)
Fターム[2F129BB06]に分類される特許
21 - 40 / 91
路車間通信システム
【課題】路車間通信において得られた情報を用いることで自車両の位置を特定する精度を向上させた路車間通信システムを提供することを課題とする。
【解決手段】トンネル入口付近に設けられた情報提供装置11と車載されたナビゲーションシステムとの間で通信を行う路車間通信システムにおいて、情報提供装置11は設置された位置情報ならびに情報提供装置11より先の道路の道路線形情報を送信提供し、ナビゲーションシステムは、情報提供装置11から送信提供された情報を受信する送受信部12と、CAN14を介して収集された自車両の挙動を認識する走行状態認識部154と、GPS13により自車両の位置を認識する位置認識部152と、情報提供装置11から送信提供された情報に基づいて自車両の位置を補正し、補正された自車両の位置と自車両の挙動とに基づいて、自車両の位置を特定する自車位置処理部155とを備えて構成される。
(もっと読む)
経路探索装置、プログラム、電子地図データおよび記録媒体

【課題】施設の出入口等の位置を考慮した経路探索を実現する技術を提供する。
【解決手段】通常のノードとリンクに加え、施設内にもノードとリンクを持たせる。また、施設の中と外とを結ぶ出入口にもノードを持たせる。出発地が施設外でかつ、目的地が施設内である経路探索において、これらのノードおよびリンクをシームレスに用いることにより、最適な出入口を経由する経路を探索することが可能となる。
(もっと読む)
車両用運転診断装置、車両用運転診断可否判定方法および運転診断用プログラム
【課題】リアルタイムで診断して運転教示することができるようにし診断可能区間を増加させるようにする。
【解決手段】制御回路は、車両Eが分岐路R0に進入する前の道路R1を走行している時点における自信度レベルCLfが予め定められた所定レベル以上であり(T1)、車両Eが分岐路R0を通過後の道路R2を走行している時点における自信度レベルCLeが所定レベル以上である場合(T4)に、分岐路R0およびその周辺の運転診断フラグを「0」に設定し(T5)、運転診断を可能にする。
(もっと読む)
車両用車線認識装置
【課題】コスト負担を抑制しつつ、投受光器との通信を行なう際に車両の走行している車線を認識することが可能な車両用車線認識装置を提供すること。
【解決手段】光ビーコンから情報を取得可能な車両に搭載される車両用車線認識装置であって、車両の位置を取得する車両位置取得手段と、地図データを記憶した地図データ記憶手段と、車両周辺を撮像する撮像手段と、前記車両位置取得手段により取得された車両の位置、及び前記地図データを用いて、前記光ビーコンが存在すると予想される所定エリアに車両が接近しているか否かを判定し、前記所定エリアに車両が接近していると判定した場合に前記撮像手段を作動させる制御手段と、を備える車両用車線認識装置。
(もっと読む)
位置追跡装置、位置追跡システムおよび位置追跡方法
【課題】移動物に装着され、その現在位置を逐次取得可能にし、かつ省電力化する技術を提供する。
【解決手段】位置追跡装置10は、人工衛星30からのGPS信号を受信して位置を測位し、測位した位置に時刻を関連付けた情報を記憶する。位置追跡装置10は、その記憶した情報を通信機能を用いて、携帯通信網基地局31を介して、位置追跡サーバ11に送信する。なお、位置追跡装置10が、建物内または地下40にある場合、その建物内または地下40に設置されているエリアID送信機12からエリアIDを受信する。そして、位置追跡装置10は、受信したエリアIDが予め記憶しておいたエリアIDと一致したときに、携帯通信網基地局31との通信が不可能であると判定し、その通信機能の電源を所定の時間OFFする。
(もっと読む)
車両支援装置及びその方法
【課題】
車両の位置評定に光ビーコン装置を利用することにより、車両の前進方向に対する角度を算出し、車両の位置評定の精度を向上させる車両支援装置を提供する。
【解決手段】
車両支援装置は、路側装置の発光手段1からの複数の拡散光線を受光手段2が受光し、光情報検出手段3が当該受光した光量を検出し、光情報記憶手段4がこの光量を記憶し、変化量演算手段5がこの光量の変化量を演算し、移動方向予測手段7が移動速度計測手段6により計測された移動速度及びこの変化量に基づいて車両の移動方向を予測し、表示手段8がこの予測結果を表示するものであり、発光装置1からの拡散光線の変化量により車両の移動角度を算出して移動方向を予測することで車両の位置評定の安定化及び高精度化を図ることができる。
(もっと読む)
車載システム
【課題】GPSアンテナの設置位置や光ビーコンアンテナの設置位置によらずに、光ビーコン信号より算定した現在位置を用いて、GPSによる衛星測位によって算定した現在位置を正しく補正する「車載システム」を提供する。
【解決手段】光ビーコンアンテナ17の自車上の設置位置と、GPSアンテナ14の自車上の設置位置202の指定を、予めユーザから受け付ける。路側機400から光ビーコンで自車位置情報を受信したならば、光ビーコンアンテナ17の設置位置の位置座標を算出し、光ビーコンアンテナ17の設置位置の位置座標と、ユーザから設置された光ビーコンアンテナ17とGPSアンテナ14の自車の設置位置の相対位置関係より、GPSアンテナ14の設置位置の位置座標を求め、GPS受信機15の衛星測位位置を、求めたGPSアンテナ14の位置座標に一致させる補正情報を設定する。
(もっと読む)
自律測位装置、および自律測位プログラム
【課題】高精度かつ低負荷の自律測位を実現すること。
【解決手段】(A)の状態から三角形△abcを平行移動し、点gを点Gに一致させる。(B)で重心gを中心として三角形△abcを回転角φ分回転させる。回転角φは0°≦φ≦360°であり、所定量Δφずつ加算されていく。この状態が(C)である。回転前に、頂点Pa,PA間距離aA、頂点Pb,PB間距離bB、頂点Pc,PC間距離cCの和を算出する。(D)は回転後の状態を示している。回転角φの回転後においても、頂点Pa,PA間距離aA、頂点Pb,PB間距離bB、頂点Pc,PC間距離cCの和を算出して、回転前の距離aA〜cCの和と比較する。回転後のほうが小さいときの回転角φを保存する。そして、最終的に得られた回転角φと地点Pcに到達する移動軌跡Vbcの最終ベクトルvendにおける移動回転角とを加算することで初期方位が算出される。
(もっと読む)
位置情報システム
【課題】屋外ではGPS信号、屋内では可視光通信システムからの光信号を利用する携帯受信端末を含む位置情報システムにおいて、屋内で携帯受信端末に屋外の情報が誤表示されることを防止する。
【解決手段】位置情報システムは携帯受信端末2を含む。携帯受信端末2は、GPS信号を受信するGPS測位部21と、光信号SLを受信する光受信部22と、表示部23と、GPS信号又は光信号SLから位置の情報を得ると共に、それらの情報の一方を、表示部23に表示させる端末制御部24と、屋内空間の出口を認識する認識部27とを有する。端末制御部24は、光受信部22が光信号SLを受信した後は、認識部27が出口を認識するまで、GPS測位部21がGPS信号を受信しないように制御する。これにより、携帯受信端末2の誤表示を防止することができる。
(もっと読む)
案内マップ
【課題】複数の案内対象物が存在するエリアにおいて所望の案内対象物に容易に辿り着かせる。
【解決手段】複数の案内対象物をそれぞれ示す複数の動物アイコン12a〜12jと、複数の案内対象物間を結ぶ経路を示す経路情報15とが表示されてなる案内マップ1において、案内マップ1の現在位置を取得する通信部25と、複数の案内対象物のうち指定された案内対象物を示す動物アイコンと、複数の案内対象物のうち通信部25にて取得された現在位置に最も近い案内対象物を示す動物アイコンとを強調表示する表示ユニット22a〜22j及び制御基板26とを有する。
(もっと読む)
端末測位方法、端末測位システム及び基地局
【課題】GPSの測位対象である携帯電話機等の携帯端末が高層建造物等に近い場合、その高層建造物等によりマルチパスが発生し、衛星から送信される電波の正確な受信が不可能になり、GPSによる高精度な測位が困難になる。
【解決手段】高精度な測位が可能である車両2が、カメラ等の歩行者検知部4により歩行者1の位置を検出し、自車両2の位置情報8と歩行者検知部4により検出した歩行者の位置情報44を用いて高精度な歩行者の位置情報20を取得し、取得した高精度な歩行者の位置情報20を該当の歩行者1が所持する携帯端末3に送信するという手段により携帯端末3の位置情報を高精度にする。
(もっと読む)
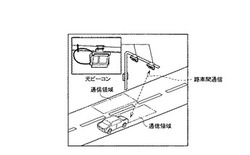
位置判定システム及び方法
【課題】 車両の車載装置が自律的に有する自車位置の異常を路側で判定できるようにする。
【解決手段】 本発明は、光無線通信と電波無線通信の双方に対応する車両5の車載装置2が自律的に有する自車位置の異常を、路側で判定するための位置判定システムに関する。このシステムでは、ビーコンヘッド8に対して車載装置2が送信したアップリンク光UOに基づいてビーコンヘッド8の通信領域Aに対する車両5の通過位置X0を路側で特定し、特定された車両5の通過位置X0を利用して、ビーコンヘッド8との光無線通信の後に車載装置2が送信する電波信号S5に含まれる車両5の自車位置X1が異常か否かを、路側で判定する。
(もっと読む)
路車間通信システムとこれに用いる光ビーコン
【課題】PD分割タイプの光ビーコンを用いた路車間通信システムにおいて、車両進行方向端部に位置する分割領域におけるアップリンク光の送信位置に関して、より高精度の情報提供を行う。
【解決手段】本発明は、通信領域Aにおいて車載機2と光ビーコン4の投受光器8との間で光信号による路車間通信を行う路車間通信システムである。このシステムは、通信領域Aに含まれるアップリンク領域UAを車両進行方向に分割してなる分割領域UA1〜UA4に対応して、アップリンク光UOを受信する複数のフォトダイオードを有する。アップリンク領域UAの車両進行方向端部を構成する分割領域UA1に対応するフォトダイオード11の受光エリアが、それ以外の分割領域UA2〜UA4に対応するフォトダイオードの受光エリアよりも小さく設定される。
(もっと読む)
位置特定装置、位置特定システム、位置特定方法及びコンピュータプログラム
【課題】状況に応じて信頼性が左右する測位方法、及び移動距離と共に誤差が蓄積するが短時間での変位量の精度が高い測位方法を適切に組み合わせ、適切に車両位置を特定できる位置特定装置を提供する。
【解決手段】道路上の位置情報を送信機20から受信し、受信した位置情報を用いて車両から送信機20までの距離を取得し、取得した距離情報に基づいて車両位置を特定する位置特定装置において、受信した位置情報を用いて取得した車両から送信機20までの距離d1、及び所定時間後に取得した距離d2に基づいて、所定時間内に車両が移動した移動距離D1を算出する。また、取得した車速Vに基づいて、所定時間内に車両が移動した移動距離D2を算出する。移動距離D1及び移動距離D2に基づいて、取得した車両から所定地点までの距離d2に対する信頼性の有無を判定し、信頼性がある場合、距離d2に基づいて車両位置を特定する。
(もっと読む)
歩行者誘導装置、コンピュータプログラム及び歩行者誘導方法
【課題】歩行者に対して目的地点までの経路を効果的に誘導することができる歩行者誘導装置、コンピュータプログラム及び歩行者誘導方法を提供する。
【解決手段】経路特定部179は、歩行者の現在位置から目的地点までの経路をすべて歩行した場合の歩行距離L1を算出するとともに、交通機関を利用して目的地点まで到達する経路での歩行距離L2を算出する。経路特定部179は、算出した距離L1がL2よりも所定の閾値以上長いときには、交通機関を利用した経路を選択する。経路特定部179は、選択した経路上に所定の経由地点があるか否かを判定し、経由地点がある場合、その経由地点を特定する。歩行者誘導部20は、経路特定部179で特定された経路上の経由地点へ歩行者を誘導する。また、歩行者誘導部20は、歩行者が最後の経由地点に到達した場合、目的地点へ誘導する。
(もっと読む)
位置特定装置、コンピュータプログラム及び位置特定方法
【課題】歩行者の位置を精度良く特定することができる位置特定装置、コンピュータプログラム及び位置特定方法を提供する。
【解決手段】歩行挙動判定部173は、距離センサ132、方位センサ133、高度センサ134などで得られたデータに基づいて、歩行者の歩行挙動を判定する。乗降判定部174は、歩行者の歩行挙動と移動時間又は振動特性とに基づいて、歩行者が地下鉄などの交通手段に乗車したか否かを判定する。位置特定部175は、乗降判定部174で歩行者が交通手段に乗車したと判定した場合、歩行者が乗車したと判定した時点からの経過時間及び交通機関の駅間の所要時間に基づいて、交通機関の路線に沿って歩行者の位置を特定する。
(もっと読む)
ナビゲーション装置、表示情報調停方法
【課題】情報の優先順位のみに従うことなく情報を見やすく表示するナビゲーション装置等を提供すること。
【解決手段】優先順位に基づき画面に表示する表示情報を切り替えて表示するナビゲーション装置100において、表示情報を提供する提供装置50、70の位置を取得する提供装置位置取得手段31と、車両の位置と連携して表示情報を生成させる連携対象情報を記憶する地図情報記憶手段14と、現在位置よりも進行方向前方の車両の予測ルートを予測する自車位置予測手段32と、予測ルートに存在する、提供装置又は連携対象を検出し、表示情報の表示区間が重複する表示情報がある場合、提供装置又は連携対象にかかる表示情報の表示位置に到達する前に、重複する表示区間に表示する表示情報を決定して表示スケジュールを生成する表示情報スケジューリング手段33と、表示情報の表示位置に到達した場合、表示スケジュールに従い前記表示情報を表示する表示制御部34と、を有することを特徴とする。
(もっと読む)
位置標定装置、受光装置、情報転送装置、ナビゲーション装置、移動体、位置標定プログラム、および情報転送プログラム
【課題】安価かつ簡易な仕組みによって最適な境界位置を設定して高精度な移動体の位置標定を実現すること。
【解決手段】(1)〜(4)の一連の流れは渋滞や信号停止の場合に発生する。(1)は光照射エリア内で停止している前方車両1000により光遮蔽エリアが作られ、移動体101が光照射エリアに進入している状態を示している。(2)は光遮蔽エリアに移動体101が進入して光遮蔽エリアで停止した状態を示している。光ビーコン102からの光信号が遮蔽されてしまうため誤検出の原因となる。(3)は前方車両1000および移動体101が停止している状態で前方車両1000が発進した状態を示している。(4)は、前方車両1000の発進に追従して移動体101が前進した状態を示している。光ビーコン102からの光信号が受光装置で正常に遮断され、移動体101の位置を標定する。
(もっと読む)
位置検出装置、車両及び位置検出方法
【課題】送信部から発せられた赤外線について、道路上における光強度の分布が不均一であっても、この送信部との相対位置を精度良く求めることのできる位置検出装置を提供する。
【解決手段】位置検出装置は、送信部から発せられる赤外線を受光する受光素子7a,7bを複数有している。これら受光素子7a,7bでの赤外線の到達光の光強度が同一である場合に、その到達光の入射角度に応じて検出レベルに差が生じるように、受光素子7a,7bは設けられている。これら受光素子7a,7bがそれぞれ赤外線を受光する位置における到達光の光強度の比を求める。受光素子7a,7bの検出レベルを用いて入射角度を前記光強度の比によって補正して求める。この入射角度、並びに、受光素子及び送信部の高さ情報に基づいて送信部との相対位置を求める。
(もっと読む)
情報提供装置、情報提供方法、ならびに、プログラム
【課題】データ受信側にとって有益となるに相応しいタイミングでコンテンツを再生できるようにする。
【解決手段】車載器200において、データ取得部251はコンテンツデータを路側無線装置から取得して、データ記憶部260に記憶する。取得したコンテンツデータに予め指定された第1の再生条件が位置一致判別部255と方向一致判別部257と道路種別判別部259により満たされると判別されると、データ再生部253はコンテンツデータを再生する。第1の再生条件が満たされたときにデータ再生部253がコンテンツデータを再生できない場合、位置一致判別部255と方向一致判別部257と道路種別判別部259はコンテンツデータに予め指定された第2の再生条件を満たすか否かを判別する。第2の再生条件が満たされれば、データ再生部253はコンテンツデータを再生する。
(もっと読む)
21 - 40 / 91
[ Back to top ]