
Fターム[2F129BB06]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 絶対位置測位 (12,751) | ビーコン (507) | 光 (91)
Fターム[2F129BB06]に分類される特許
41 - 60 / 91
情報提供装置、情報提供方法、ならびに、プログラム
【課題】データ受信側にとって有益となるに相応しいタイミングでコンテンツを再生できるようにする。
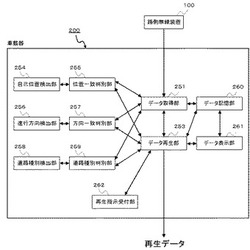
【解決手段】車載器200において、データ取得部251は路側無線装置からコンテンツデータを取得し、データ記憶部260は取得したコンテンツデータを格納する。取得したコンテンツデータに予め指定された再生条件が位置一致判別部255と方向一致判別部257と道路種別判別部259により満たされると判別されると、データ再生部253はコンテンツデータを再生する。また、データ表示部261はデータ記憶部260に格納されたコンテンツデータのリストを表示し、再生指示受付部262はコンテンツデータを再生する旨の指示入力をユーザから受け付け、データ再生部253は指示入力が示すコンテンツデータを再生する。
(もっと読む)
情報提供装置、情報提供方法、ならびに、プログラム

【課題】データ受信側にとって有益となるに相応しいタイミングでコンテンツを再生できるようにする。
【解決手段】車載器200において、データ取得部251はコンテンツデータを路側無線装置から取得して、データ記憶部260に記憶する。取得したコンテンツデータに予め指定された第1の再生条件が位置一致判別部255と方向一致判別部257と道路種別判別部259により満たされると判別されると、データ再生部253はコンテンツデータを再生する。第1の再生条件が満たされたときにデータ再生部253がコンテンツデータを再生できない場合、位置一致判別部255と方向一致判別部257と道路種別判別部259はコンテンツデータに予め指定された第2の再生条件を満たすか否かを判別する。第2の再生条件が満たされれば、データ再生部253はコンテンツデータを再生する。
(もっと読む)
車両位置特定システム、車載機及び送信機
【課題】自車の走行位置を精度良く特定することができる車両位置特定システム、車載機及び送信機を提供する。
【解決手段】車載機30は、送信機20から信号を受信した場合、信号の到達時間を算出し、到達時間に光速を積算して、送信機20からの距離を算出する。車載機30は、自車位置が送信機20の位置を中心とする球面上であることがわかる。車載機30は、自車両が走行する道路(リンク:交差点間の道路)の道路形状情報及び車載機30の高さ情報を組み合わせることで、仮想的な走行面を特定する。車載機30は、自車位置を球面と走行面とが交わる交線として特定する。
(もっと読む)
携帯端末、交通案内情報処理装置、交通案内システム、及び交通案内プログラム
【課題】利用者の希望に合わせた詳細な交通案内情報を提供することができる携帯端末、交通案内情報処理装置、交通案内システム、及び交通案内プログラムを提供する。
【解決手段】本実施の形態の携帯端末10では、駅構内から目的地の駅までの交通案内を行う場合は、可視光通信部46により送受信機36等によりサーバ装置20と通信を行うことにより、案内図を作成し、利用者が移動中に現在位置から目的地までの交通案内を行い、鉄道の車内における利用者に対して交通案内を行うことができるので、利用者の希望に合わせた詳細な交通案内情報を提供することができる。
(もっと読む)
分岐路内位置演算装置、分岐路内位置演算方法、および、分岐路内位置演算プログラム
【課題】分岐路内の自車位置を高精度で求め、分岐路内の自車の制御に有効な情報を出力すること。
【解決手段】コンピュータが、自車位置を検出し、分岐路情報で示される所定分岐路の付近に検出した自車位置が存在するとき、所定分岐路の分岐開始点を検出し、自車位置が所定分岐路の分岐元となる本線から所定分岐路へと進入したことを検出し、所定分岐路へと進入した自車位置について、分岐開始点からの走行距離に基づいて分岐路内位置を演算し、分岐路内位置から分岐路情報で示される制御点の位置までの残距離を演算し、分岐路内位置および残距離を出力する。
(もっと読む)
測位装置、測位システム、コンピュータプログラム及び測位方法
【課題】アンビギュイティの算出を高速化し、都市部などにおけるRTKの測位が可能な時間を大幅に増加させることができる測位装置、測位システム、コンピュータプログラム及び測位方法を提供する。
【解決手段】測位装置10は、衛星からの搬送波位相及び擬似距離を測定し、アンビギュイティの初期値を算出し、算出した初期値を用いて解の候補を推定する。測位装置10は、自身の概略の水平位置(緯度、経度)とその水平位置での道路の高度情報により測位装置10の高さ位置(より正確には衛星信号の受信用アンテナの高さ位置)の範囲を設定し、各衛星からの搬送波位相が等しい等位相の多数の交点(解の候補)の中から、設定した範囲内にある解の候補に限定した上で真の解であるか否かの検定を行う。
(もっと読む)
情報転送装置、位置標定装置、情報転送プログラム、記録媒体および情報転送方法
【課題】通信機器の設置位置情報を利用して移動体の現在位置を高精度に算出できるシステムの普及拡大を図ること。
【解決手段】情報転送装置は、路側に設置された光ビーコン102から光ビーコン102に接近してくる車両101に発信される光ビーコン102の設置位置に関する情報を受信し、車両101が光ビーコン102の直下近傍に位置することを検出する。そして、受信された設置位置に関する情報を、車両101の位置標定先に送信する。ここで、車両101が光ビーコン102の直下近傍に位置することが検出されるまで設置位置に関する情報の送信を禁止し、検出された場合に設置位置に関する情報を送信する。
(もっと読む)
車両位置算出装置
【課題】 位置情報を取得した際の車両の向きによらず、現在の車両の位置を精度よく算出することができる車両位置算出装置を提供する。
【解決手段】 車両位置算出ECU1における進行方向検出部16は、受信エリア形状取得部12から出力された受信エリア形状情報、移動距離算出部13から出力された移動距離情報、および進路変更行動検出部14から出力された進路変更情報に基づいて、受信エリアにおける車両の進行方向を検出する。また、車両位置算出部17は、基準位置取得部11から出力された基準位置情報に基づいて基準位置(x,y)を設定し、相対位置変化検出部15から出力された相対変化情報に基づく相対変化(Δx,Δy)に、進行方向検出部16から出力された進行方向を加味して現在の車両位置を算出する。
(もっと読む)
車両位置特定システム、車載機、送信機、時刻補正システム及び時刻補正装置
【課題】自車の走行位置を精度良く特定することができる車両位置特定システム、車載機、送信機、時刻補正システム及び時刻補正装置を提供する。
【解決手段】車載機30が光ビーコン10との通信可能な領域Rに進入した場合、車載機30は、自車位置を測位する。車載機30は、領域Rを通過した直後(領域Rを通過して時間経過が短い時)、送信機20が送信した信号を受信し、車載機30と送信機20との時刻を擬似的に同期させる。その後、車載機30は、送信機20が送信した信号を受信し、受信した信号に基づいて自車位置を特定する。自車位置は、例えば、送信機20(又は停止線P)からの距離により特定することができる。
(もっと読む)
位置算出装置、位置算出プログラム、記録媒体および位置算出方法
【課題】既設のインフラ設備の有効活用を図りつつ、基準位置に対する移動体の位置の算出精度の向上を図ること。
【解決手段】車両に設けられ、路側に設置された光ビーコン102から発信された光信号の受光状態に基づいて、光ビーコン102の通信エリアに対する車両の位置関係の変化を検出する。そして、通信エリアに関する情報Hb,Ld,Lnに基づいて、変化が検出されたタイミングにおける通信エリア内の基準点(X,Y)に対する受光部の位置を算出し、算出された算出結果を出力するようにした。
(もっと読む)
ナビゲーションシステム及びプログラム
【課題】現在地から案内地点までの距離を容易に認識することができるようにする。
【解決手段】情報取得処理手段と、表示部35に地図を表示する表示処理手段と、案内地点について拡大図を表示する拡大図表示処理手段とを有する。拡大図表示処理手段は、案内地点が連続交差点であるかどうかを判断し、案内地点が連続交差点である場合に、自車位置表示マークを拡大図上に表示し、現在地から第1の案内交差点までの残距離を表示するための第1の残距離表示エリアを自車位置表示マークに追随させて表示し、現在地から第2の案内交差点までの残距離を表示するための第2の残距離表示エリアを拡大図上の所定の位置に表示する。案内地点が連続交差点である場合に、第1の残距離表示エリアが自車位置表示マークに追随させて表示され、第2の残距離表示エリアが拡大図上に表示されるので、運転者は、道路の形状を認識しながら残距離を容易に認識することができる。
(もっと読む)
通信システム及び車載機
【課題】自車の走行位置を精度良く特定することができる通信システム及び車載機を提供する。
【解決手段】車載機30が光ビーコン10との通信可能な領域Rに進入した場合、光ビーコン10は、車載機30が領域Rに存在することを送信機20へ通知する。送信機20は、所定の信号を車載機30へ送信する。車載機30は、その信号を受信し、車載機30と送信機20との時刻を同期させる。これにより送信機20と車載機30との間の時刻を一致させる。領域Rを通過した後、道路上の任意の地点で車載機30は、送信機20が送信した信号を受信し、受信した信号の受信時刻及びその信号の送信時刻に基づいて、送信機までの距離を求めることで自車位置を特定する。
(もっと読む)
車載光ビーコン装置
【課題】ダウンリンクデータを確実に取得することができる車載光ビーコン装置を提供する。
【解決手段】第1のフレーム62aを正常に受信できなかったので、次の第1のフレーム62eが送信されている時間帯にアップリンクを行わないようにする。第2のフレーム62bを正常に受信できたので、次の第2のフレーム62fが送信される時間帯にアップリンク63aを行うようにする。第3のフレーム62cを正常に受信できなかったので、次の第3のフレーム62gが送信されている時間帯にアップリンクを行わないようにする。第4のフレーム62dを正常に受信できたので、次の第4のフレーム62hが送信される時間帯にアップリンク63bを行うようにする。
(もっと読む)
位置検知装置
【課題】複数の絶対位置検知装置の精度を評価して、最も高精度の絶対位置検知装置の検知出力を位置検知結果として出力する。
【解決手段】それぞれ既知の位置から放射される複数の信号を受信して自己の絶対位置を検知する複数種の絶対位置検知装置8と、所定期間内における自己の移動量を自己の相対位置の変化として検知する相対位置検知装置7と、前記所定期間内における相対位置の変化の軌跡と前記所定期間内における前記絶対位置検知装置が検知した絶対位置の変化との類似度を、前記各種の絶対位置検知装置毎に計算する類似度算出部14と、前記複数種の絶対位置検知装置のうち、最大の類似度を有する絶対位置検知装置の出力を選択して出力する出力切り替え部15を備えた。
(もっと読む)
車両用道路関連情報報知装置
【課題】誤報知を避けながら運転者が正確な道路関連情報を取得できるようにする。
【解決手段】制御回路は、走行中の道路が規制対象道路でないと判定された場合(S5:NO)であっても、走行中道路が不定である(S8)場合には、規制情報を受信した(S3:YES)ことを条件として規制情報を表示制御する。
(もっと読む)
可視光通信を用いたナビゲーションシステム及び方法
【課題】本発明は、可視光通信を用いて建物の内部でナビゲーションサービスを提供するためのものである。
【解決手段】本発明は、ナビゲーション機能を提供するためのマップ情報を格納し、情報を各ランプに転送するマップサーバと、建物内の各地域に多数個設置され、マップサーバからナビゲーション機能を提供するためのマップ情報を受信し、可視光通信を使用して受信した情報を可視光信号として発生させるランプと、可視光受信モジュールを備えてランプから発生する可視光信号を受信してマップ情報の提供を受けて、提供を受けたマップ情報に従うマップイメージをディスプレイする移動端末とを含む。
(もっと読む)
通信システム及び車載機
【課題】自車の走行位置を精度良く特定することができる通信システム及び車載機を提供する。
【解決手段】車載機40は、通信機10、20、30が送信した信号を受信する。車載機40は、通信機10が送信した信号の受信時点と、通信機20が送信した信号の受信時点との時間差である受信時間差t21を算出する。また、車載機40は、通信機10が送信した信号の受信時点と、通信機30が送信した信号の受信時点との時間差である受信時間差t31を算出する。車載機40は、通信機10、20、30の位置情報、遅れ時間Δt21、Δt31、受信時間差t21、t31に基づいて、自車位置を特定する。
(もっと読む)
情報配信サービスシステム及び情報配信車載装置
【課題】位置情報とリンクされたコンパクトな映像ファイルにて画像情報を蓄積する情報配信サービスシステムを提供する。
【解決手段】車輌側システムは車外の動画像の撮像部と、現在位置の位置情報取得部と、該撮影画像データと該位置情報を車外に送信する無線通信部を有し、情報配信サービスセンター側システムは送信される撮影画像データと位置情報とを受信するデータ受信部231と、路線区間データ、交差点区間データ、路線外区域データと、それぞれのデータ間を区切る仮想的な基準ラインデータとを収録した路線基準ラインデータベース252と、該データベース及び受信位置情報とから基準ラインを検索する基準ライン検索部211と、該基準ラインデータをもとに、撮影画像データを分割して映像ファイル化する画像データファイル分割部213と、分割された映像ファイルを映像ファイルデータベース253に格納する画像データファイル格納部210を有する。
(もっと読む)
位置検出システム及び位置検出方法、並びに、これに用いられる光ビーコン及び車載機
【課題】道路上での自己位置を検出することができると共に、検出誤差を低減することができる位置検出システムを提供する。
【解決手段】車両Cの車載機11が光ビーコン2と通信を行い、ビーコンヘッド2aとの道路に沿った方向の相対位置を検出する。車載機11において、受光ユニット12は、ビーコンヘッド2aからの赤外線を受光する受光素子を複数有し、これら受光素子は赤外線の入射角度に応じて相互の間で検出レベルに差が生じ得るように設けられている。角度検出部26は、各受光素子の検出レベルを用いて前記入射角度を検出する。誤差取得部28は、受光ユニット12に起因する誤差を取得する。相対位置検出部27は、角度検出部26による検出角度を前記誤差に基づいて補正した補正角度、並びに、受光ユニット12及びビーコンヘッド2aの高さ情報に基づいて前記相対位置を検出する。
(もっと読む)
通信システム、車載機、車両及び送信機
【課題】自車の走行位置を精度良く特定することができ、自車の進行方向前方の所定位置までの距離を精度良く求めつつ所定位置まで到達することができる通信システム、車載機、送信機及び車両を提供する。
【解決手段】車載機20で領域Rにおける自車の位置を高精度に取得し、停止線Pまでの距離を高精度に算出する。また、車載機20は、送信機30、40、50から送信された信号の到達時間差、送信機30、40、50までの距離に基づいて、送信機30、40、50が送信する信号の周期の同期ずれを算出する。その後、自車が走行を続け、任意の走行地点で、送信機30、40、50から送信された信号の到達時間差、算出した同期ずれ及び送信機30、40、50の位置情報に基づいて、自車位置を特定する。
(もっと読む)
41 - 60 / 91
[ Back to top ]