
Fターム[2F129BB06]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 絶対位置測位 (12,751) | ビーコン (507) | 光 (91)
Fターム[2F129BB06]に分類される特許
61 - 80 / 91
車両位置検出システム、車載装置及び車両位置検出方法
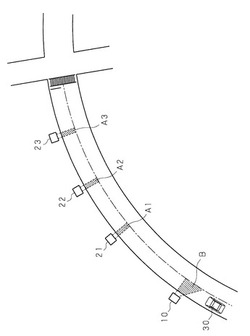
【課題】車両の位置を精度良く検出することができる車両位置検出システム、車載装置及び車両位置検出方法を提供する。
【解決手段】車載装置30は、光ビーコン10との通信により、路上装置21、22、23それぞれの交信位置、その誤差範囲、停止線の位置などを受信し、受信した情報を記憶するとともに、走行距離の計測を開始し、車両位置の推定を所定時間経過の都度繰り返し行う。車載装置30は、路上装置21、22、23との交信により、交信地点の位置及びその誤差範囲を取得し、交信地点の位置の誤差範囲及び走行距離の誤差範囲に基づいて、車両の位置の推定誤差が最小になるように、交信時点の直前に推定した車両位置の推定値を更新する。
(もっと読む)
距離変換情報生成装置、車載装置及び距離変換情報生成方法

【課題】車輪の回転に応じて生成される走行信号と車両の走行距離とを関連付ける距離変換情報を精度良く生成することができる距離変換情報生成装置、車載装置及び距離変換情報生成方法を提供する。
【解決手段】車載装置30は、光ビーコン10との通信により領域Aの交信地点(所定の地点)を通過した際に、領域Aを通過することを示す信号及び光ビーコン10との交信地点と路上装置20との交信地点との間の区間距離を受信し、信号を受信した時点から、車輪の回転に比例して生成されるパルス信号のパルス数の計数を開始する。車載装置30が、車両が領域Bを通過することを示す信号を路上装置20から受信した時点で、区間距離を計数したパルス数で除算して、距離変換係数を算出する。
(もっと読む)
ナビゲーション装置及びナビゲーション方法
【課題】案内処理を、運転者の感覚に適合し、的確且つ正確なものとすることが可能なナビゲーション装置を提供する。
【解決手段】 自車位置情報と前記案内ルートとの関係に基づいて、案内処理手段が前記案内ルートに従った案内を実行するナビゲーション装置を構成するに、第一自車位置情報を取得する第一自車位置情報取得手段2と、精度の高い第二自車位置情報を取得する第二自車位置情報取得手段3とを備え、案内に使用する自車位置情報である案内自車位置情報を決定する自車位置決定手段7を備え、案内自車位置情報の精度が予め設定された基準精度より低い場合に、案内処理手段8による案内処理の状態変更を保留し、基準精度より高くなった場合に案内処理を開始する構成とする。
(もっと読む)
位置標定装置、位置標定方法、情報配信装置および情報配信方法
【課題】高精度に移動体の位置標定をおこない、移動体の安全な走行を図ること。
【解決手段】車両が通信エリアに進入した場合は、発信部201によって、路側機110に対して、車両の車両IDを含むアップリンク信号を発信し、アップリンク信号が発信された結果、受信部202によって、送信部254によって送信されるダウンリンク信号を受信する。そして、移動時間算出部203によって、通過時刻から現在時刻まで車両が移動した時間を算出し、移動距離算出部204によって、車両が移動した距離を算出する。そして、現在位置標定部205によって、算出された距離およびダウンリンク信号に含まれる観測地点の位置情報から、車両の現在位置を標定する。
(もっと読む)
経路案内表示装置及び経路案内方法
【課題】経路案内によるドライバの車両運転時のストレスを軽減する。
【解決手段】走行車線単位の経路であって、所定の条件において最も推奨される推奨経路と、推奨経路以外の経路である提案経路とを探索し、探索された推奨経路へと誘導する推奨経路誘導図形IMを生成し、探索された提案経路へと誘導する提案経路誘導図形SIMを生成し、生成された推奨経路誘導図形IMと、生成された提案経路誘導図形SIMとを所定のタイミングで経路案内用の画像に重畳させ、推奨経路誘導図形IMと提案経路誘導図形SIMとが重畳された経路案内用の画像を表示することで実現する。
(もっと読む)
経路案内表示装置及び経路案内方法
【課題】車載カメラで撮影された車両前方画像を表示させて探索された経路を経路案内する場合に、車両の現在位置から所定の距離以上遠方に存在する分岐点において右折方向、又は左折方向を指示する経路誘導情報を事前に提示する。
【解決手段】探索された経路上において車両の現在位置から所定の距離以上遠方に存在し、右折、又は左折をするよう方向が指示されている分岐点を検出し、検出された分岐点で指示されている方向に応じて、指示されている方向を示唆するように形状を変形させた経路誘導図形IMを生成し、カメラ装置20で撮影された車両前方画像中の探索された経路に該当する道路画像上に重畳させ、経路誘導図形IMを重畳された車両前方画像を表示させることで実現する。
(もっと読む)
GPS測位装置
【課題】 マルチパスによる影響を低減し、測位精度の高い「GPS測位装置」を提供する。
【解決手段】 GPS測位装置は、移動体の高度情報Zoを記憶する高度情報メモリ34と、捕捉可能な複数のGPS衛星の中からGPS衛星の組合せを求める組合せ算出部30と、組合せ毎に移動体の3次元位置を計測する位置計測部32と、計測された3次元位置に含まれる高度情報Zと高度情報メモリ34かた提供される高度情報Zoとの差分を求める差分抽出部36と、抽出された差分としきい値とを比較し、差分がしきい値以下となるGPS衛星の組合せを選択し、選択された組合せの3次元位置に基づき移動体の測位位置を決定する位置決定部38とを有する。
(もっと読む)
自動二輪車
【課題】聴覚および視覚によらず、身体に与える振動で情報を自動二輪車の乗員に伝達できるようにする。
【解決手段】車両外部から入力される外部情報もしくは車載装置から出力される車両情報に応答して乗員の身体に振動を与える振動発生器17、17A、17Bを乗員シート15,16の座面下や背もたれ16A内、あるいは燃料タンク41の側壁面に設置する。振動発生器17、17A、17Bは無線通信装置30で他の車両との双方向無線通信によって取得した外部情報のうち予め設定された内容の情報によって駆動される。同乗者シート16に設けられる振動発生器17Bは車載オーディオ装置のオーディオ信号に応答して重低音を発するスピーカ手段としても作用させることができる。
(もっと読む)
経路案内表示装置及び経路案内方法
【課題】自車両が走行する走行車線の路面の視認性を低下させることなく、高い視認性を確保した経路案内を実行する。
【解決手段】経路を案内する経路案内図形PL,PRを生成し、生成した経路案内図形PL,PRを、経路案内用の画像中の探索された経路に該当する道路画像上以外の領域に、道路画像を明示するように重畳させ、経路案内図形PL,PRを重畳された経路案内用の画像を表示することで実現する。
(もっと読む)
ロボットナビゲーションシステム
【課題】ロボットを用い、そのロボットが有する腕部等の案内部の動きで所定の目的地への案内を行うロボットナビゲーションシステムを提供する。
【解決手段】ロボットナビゲーションシステム100は、目的地Tに信号発信装置12を設置し、信号発信装置12から発信される信号をユーザUが携行するロボット14に受信させて、そのロボット14の動作によりユーザUを目的地Tへ案内する。ロボット14は、本体部21と、2軸回りに回転自在な腕部23と、信号発信装置12から発信される信号を検知してその信号の発信元方向および信号発信装置12までの距離を検出するセンサ部22と、センサ部22が検出した信号の発信元方向を指し示し、検出した距離に応じて腕部23の動作を変化させ、その距離が予め設定された距離よりも短くなったときに腕部23の動作を停止するように腕部23の動作を制御する動作制御部24を有している。
(もっと読む)
交通情報管理システム及び交通情報管理方法
【課題】今後の道路状況について知ることができるようにする。
【解決手段】情報提供者によって提供される交通情報を受信する受信処理手段91と、交通情報を蓄積データとして蓄積する情報蓄積処理手段と、ナビゲーション装置から加工指示を受信したかどうかを判断する受信判断処理手段と、加工指示を受信したと判断された場合、情報提供者から受信した交通情報及び蓄積された蓄積データを加工することによって作成された交通情報をナビゲーション装置に送信し、加工指示を受信していないと判断された場合、情報提供者から受信したままの交通情報をナビゲーション装置に送信する送信処理手段とを有する。蓄積データを加工することによって作成された交通情報を送信し、又は情報提供者から受信したままの交通情報を送信するので、操作者は、現在の道路状況及び今後の道路状況について知ることができる。
(もっと読む)
位置検出装置、位置検出プログラム及び位置検出方法
【課題】車両の位置を精度よく検出する。
【解決手段】車両がダウンリンクゾーンに進入したと判定した後(S101:YES)、車両がダウンリンクゾーンから退出したか否かを判定し(S106)、退出したと判定すると、車両がダウンリンクゾーンから退出した旨の位置確定通知を出力する(S107)。このようにすることで、車両がダウンリンクゾーンから退出したタイミングを把握することができ、これにより、光ビーコンと車両との相対位置を把握することができる。この結果、車両の位置を精度よく検出することができる。
(もっと読む)
位置検出システム
【課題】 光学ビーコン相互間で光の受け継ぎができない状態になっても受け継ぎを繰り返すことで一時的な障害物に対処しシステムの発光リレー動作の信頼性を向上する。
【解決手段】 光学ビーコン#2は光学ビーコン#1からの発光パターン光を受光すると、IDコード「2」を含む自己の発光パターン光の発光を開始する。そして、光学ビーコン#3からの発光パターン光を受光できないときには、所定時間経過後に2回目の発光パターン光の発光を開始する。そして、2回目の発光パターン光の発光したときに、光学ビーコン#3が光学ビーコン#2の発光パターン光を受光すると、光学ビーコン#3はIDコード「3」を含む自己の発光パターン光の発光を開始する。また、光学ビーコン♯2は光学ビーコン#3の発光パターン光を受光し、発光が光学ビーコン♯3に伝達されたとして発光パターン光の繰り返し発光動作を行わない。
(もっと読む)
車線別情報提供装置
【課題】例えば交差点で、行き先の異なる車線別の車両に対して異なる情報を提供しようとするとき、交差点に進入してくる側に車線検出手段を新たに設けなければならない。
既存の車線検出手段として光ビーコンがあるが、交差点の出側に設置されているのが普通であり、そのまま利用することは出来ない。
【解決手段】例えば隣の交差点の出側に設置されている車両の走行車線を特定する車線位置検出装置と、車線を検出した地点から、その後、この交差点に至る間の車線変更を検出する車線変更検出装置とにより、交差点における車両の車線を知る。この車線情報に基づいて交差点に設けたDSRCから情報を提供する。交差点進入部に新たに光ビーコンを設置しなくても、上流にある既存の光ビーコンと交差点に設置されたDSRC無線機器を使い、車線別に情報を提供することが出来る。
(もっと読む)
移動端末装置、交通情報システム、移動端末装置の交通情報抽出方法、移動端末装置の到着時間算出方法および交通情報処理方法
【課題】車両800に自車位置を特定させ必要な交通情報を抽出させることで自動運転制御を可能にする。
【解決手段】路上光通信機200は自通信機が設置された車線について光波で発信する。光波は指向性が高いため路上光通信機200は自通信機が設置された車線を通行する車両800にのみ情報を送信することができる。車両800の車載機は路上光通信機200の下方を通行する際に光波を受信して路上光通信機200が設置された車線を自車が走行する車線として特定する。路上電波通信機300は道路の通行車両や交通規制や発生事故などの交通情報を電波で発信する。電波は指向性が低いため各車線を通行する各車両800に情報を送信することができる。車両800は交通情報から自車が走行する車線に関する交通情報を抽出する。各車両800は自車が走行する車線の交通情報に基づいて減速や車線変更などの運転制御を自動で行う。
(もっと読む)
情報表示システム
【課題】車両を走行させる前に渋滞が考慮されたルートに関する情報を得ることができ、快適な走行をすることができるようにする。
【解決手段】出発地から目的地までの経路を探索する経路探索処理手段92と、探索された経路上における予測自車位置を算出する予測自車位置算出処理手段と、前記探索された経路と共に時刻を表すスケールを表示部に表示する表示処理手段94とを有する。表示処理手段94は、表示されたスケール上の時刻が選択されると、選択された時刻における前記予測自車位置を前記探索された経路上に表示する。探索された経路と共に時刻を表すスケールが表示され、表示された前記スケール上の時刻が選択されると、選択された時刻における前記予測自車位置が表示されるので、車両を走行させる前に渋滞が考慮されたルートに関する情報を得ることができる。
(もっと読む)
車載ナビゲーション装置
【課題】車両が走行している道路をより正確に認識することができること。
【解決手段】高架道路と高架道路下の道路とでは車両周辺の状況が大きく異なる点、すなわち、高架道路と高架道路下の道路とのそれぞれ特有の車両周辺の状況がある点に着目する。この着目点から、画像処理された車両周辺の画像に、道路上方に高架道路があると検出された場合、車両は高架道路下の道路を走行しており、画像処理された車両周辺の画像に、道路側方に街灯列があると検出された場合、車両は高架道路を走行していると決定する。これにより、車両が走行している道路をより正確に認識することができる。
(もっと読む)
車載ナビゲーション装置
【課題】 運転者に質の高い案内情報を提供できる車載ナビゲーション装置を提供する。
【解決手段】 前方の風景画像にコンテンツ情報を重畳して表示部に表示することにより案内を行う車載ナビゲーション装置において、前方の風景をカメラで撮影した風景画像を取得する映像取得部6と、映像取得部で取得された風景画像から背景画像として好適な風景画像を選別し、該選別された風景画像と背景画像として好適であるかどうかの判断に用いた情報とを含む風景情報を出力する風景情報フィルタ部8と、風景情報フィルタ部から出力される風景情報を蓄積する風景情報蓄積部と、風景情報蓄積部に蓄積されている風景情報からコンテンツ情報を重畳させるのに最適な風景情報を選択する最適風景情報選択部10と、最適風景情報選択部で選択された風景情報に含まれる風景画像とコンテンツ情報とを合成して案内情報として表示部に表示させるコンテンツ合成部11とを備えている。
(もっと読む)
経路誘導装置及び経路誘導方法
【課題】
面的な空間において、障害物を避けながら移動体を目的位置まで誘導する。
【解決手段】
移動体の位置における仮想力の合力を、仮想力と地理情報との対応データに基づいて求め、仮想力の合力から経路誘導情報を作成して移動体に提示する。
【効果】
移動体の周囲からの仮想力に基づいて経路誘導情報を作成するので、面的な空間においても移動体を誘導できる。
(もっと読む)
車載ナビゲーション装置
【課題】ユーザが、事前に、案内経路沿いにおける、所望の施設種類に該当する施設の大凡の位置を少なくとも把握することができること。
【解決手段】案内経路沿いにおいて、検索された施設に該当する施設データにおける施設位置に基づいて、ターンリスト上において、隣接する2つの地点(案内経路上における出発地、案内対象交差点、及び目的地)を結んだ区間沿いのいずれかに当該施設がある場合、当該区間に当該施設に該当する施設種類を示すアイコンを表示する。このようにすることにより、ユーザはターンリストを確認することによって、いずれかの区間沿いに、いずれかの施設種類に該当する施設があるかを把握することができる。これにより、ユーザが、事前に、案内経路沿いにおける、所望の施設種類に該当する施設の大凡の位置を少なくとも把握することができる。
(もっと読む)
61 - 80 / 91
[ Back to top ]