
Fターム[2F129BB10]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 絶対位置測位 (12,751) | 専用局 (442) | 電波航法における基地局 (49)
Fターム[2F129BB10]に分類される特許
41 - 49 / 49
アシスト型衛星測位のサポート
支援データによって移動体(30、40)の衛星測位をサポートするために、通信ネットワークが、衛星(50、60)の運行を記述している専用軌道モデル、すなわち特定の衛星測位システム用に規定された専用の軌道モデルのパラメータを、衛星(50、60)の運行を記述している共通軌道モデルのパラメータへ変換する。選択的あるいは追加的に、ネットワークが、軌道モデルの利用可能なパラメータ中の衛星測位システム時間に基づいた基準値を、通信システム時間に基づいた基準値へ置き換える。パラメータ変換及び/又は基準値置き換え後、パラメータは、衛星測位用の支援データの一部として提供される。選択的あるいは追加的に、採用されている測位モードに依存せずに、移動体と通信ネットワークとの間の一方向に一連のデータが送信される。  (もっと読む)
(もっと読む)
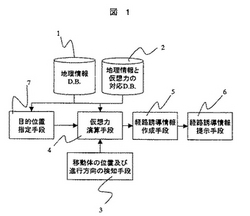
経路誘導装置及び経路誘導方法
【課題】
面的な空間において、障害物を避けながら移動体を目的位置まで誘導する。
【解決手段】
移動体の位置における仮想力の合力を、仮想力と地理情報との対応データに基づいて求め、仮想力の合力から経路誘導情報を作成して移動体に提示する。
【効果】
移動体の周囲からの仮想力に基づいて経路誘導情報を作成するので、面的な空間においても移動体を誘導できる。
(もっと読む)
2つのアンテナまたはその同等物を使用してナビゲーションビーコン信号を検出するための方法

2つのアンテナまたは合成開口アンテナのいずれかを使用して複数の異なる測定値を受信すること、および干渉除去ビームを形成するために複数のアンテナ重み成分を使用して複数の異なる測定値を結合することにより、複数のナビゲーションビーコン信号を検出するための方法。一実施形態では、複数のアンテナ重み成分が固有値処理によって決定される。他の実施形態では、複数のアンテナ重み成分が簡略化された処理によって決定される。他の態様では、単一アンテナが最初に受信される測定値を受信するために使用される。最初に受信された測定値のコピーが作成され、空間ダイバーシティをエミュレートするために適切な時間遅延を実現するために処理される。最初に受信された測定値および処理されたコピーが干渉除去ビームを形成するために結合される。 (もっと読む)
人物を位置特定する方法および装置
本発明は、動員時に被監視領域内の人員を位置特定する方法および装置に関する。この場合、超広帯域(UWB)で動作する少なくとも1つの送信機(2)と、超広帯域(UWB)で動作する少なくとも1つの送受信機(トランシーバ3)と、超広帯域(UWB)で動作する受信機が使用される。送信機(2)は動員中、被監視領域内に位置固定されて配置され、送受信機(3)は位置特定すべき人員に取り付けられ、受信機(4)は被監視領域外に設けられた監視用コンピュータ(指令センタ)に配置されてこの監視用コンピュータと接続される。 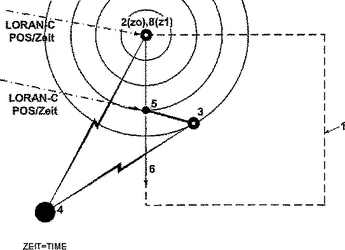 (もっと読む)
(もっと読む)
位置特定システム及び位置特定方法
移動体コントローラ装置(200)は、無線位置特定システム(204)と双方向通信システム(202)とを有し、ローバ装置(214)も、無線位置特定システム(218)と双方向通信システム(216)とを有する。コントローラ装置(200)は、ローバ装置(214)にその位置データを、ローバ装置を位置特定し、所望の場合には、迷子や落し物などにおいて探索することが可能であるように送信することを命じることが可能である。コントローラとローバとの間の相対位置を、コントローラ上に、ローバの場所を示す矢印、更には、それの移動速度、その移動の追跡や他のデータとともに表示(208)することが可能である。システムは、PDEを有するネットワーク・システム(212)と、通信機能及び算出機能の一部を行うアプリケーション・サーバ(210)とをともに動作することも可能である。 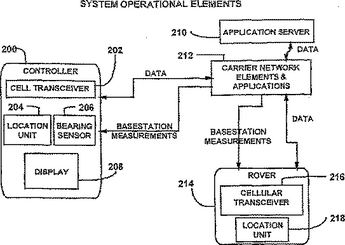 (もっと読む)
(もっと読む)
情報収集提供システムおよび情報収集提供方法
【課題】 迷子等の不測の事態の早期発見が可能な情報収集提供システムを提供する。
【解決手段】 センサ装置20aないし20eは、識別タグ10aないし10cから対象者特定情報を取得し、その対象者特定情報を、センサ特定情報と関連づけて基地局30aないし30cに送信する。基地局30aないし30cは、その互いに関連づけられた対象者特定情報とセンサ特定情報とを基地局特定情報と関連づけて制御装置60に送信する。制御装置60は、センサ識別子ごとにセンサ装置20aないし20eの設置位置と移動体に設置されているか否かを示す移動体情報とを記憶し、基地局識別子ごとに基地局30aないし30cの設置位置を記憶し、基地局30aないし30cから受け付けた互いに関連づけられた対象者特定情報とセンサ特定情報と基地局特定情報と、自己に記憶した設置位置と移動体情報に基づいて、対象者の位置と移動体に乗っているか否かを特定する。
(もっと読む)
自律型GPSの高度化方法および装置
リモート受信機を測位する方法および装置を記述している。一実施例では、長期衛星追跡データがリモート受信機で得られる。移動衛星測位システム(SPS)衛星が検出される。上記リモート受信機から上記検出されたSPS衛星への擬似距離が決定される。上記擬似距離および上記長期衛星追跡データを用いて上記リモート受信機の測位が計算される。SPS衛星は、すでに計算された測位を用いて計算される捕捉支援データおよびブラインドサーチの少なくともいずれか一方を用いて検出される。長期衛星追跡データを使用することにより、上記リモート受信機が、上記衛星からのエフェメリスをデコードすることの必要性を取り除いている。さらに、上記リモート受信機の測位は、サーバまたはネットワークから初期推定測位を得ずに計算される。 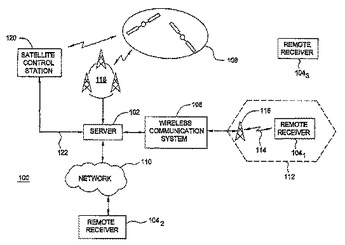 (もっと読む)
(もっと読む)
ナビゲーションシステムにおける地図表示
【課題】コンピューティングデバイス上に地図情報を表示するためのシステム、及び方法を開示する。
【解決手段】道路区間に沿った移動に乗り出す前に、一又はそれ以上の道路区間に沿った移動のシミュレーションを描画するためのデータを格納する。そのシミュレーションは、道路ネットワークの上の、又は道路ネットワークに沿った視点からの、各道路区間に沿った道路ネットワークの一連の表示から成る。各道路区間は、予測されたルートの一部とすることができ、シミュレーションは、その予測されたルート内に含まれる全ての道路区間についての表示を含むことができる。各道路区間に沿って、コンピューティングデバイスが運ばれている間、シミュレーションのために格納されたデータを使って、コンピューティングデバイスのディスプレイ上に、そのコンピューティングデバイスの現在位置を含む、道路ネットワークの表示を示す。
(もっと読む)
ナビゲーション装置および経路誘導方法
ナビゲーションサーバ1,地図DB102と、出発地および目的地間の誘導経路を探索する経路探索部104と、誘導経路の道路形状が簡略化された形状簡略道路地図データを作成する形状簡略道路地図作成部106と、地図データにおける誘導経路の形状と形状簡略道路地図データにおける誘導経路の形状との差分が所定量以上ある誘導経路の部分を注意部分として検出する注意部分検出部107と、経路誘導において現在地が注意部分に到達した際にナビゲーション端末2に出力させる、地図データおよび形状簡略道路地図データの注意部分の差分に基づいた誘導注意情報を生成する注意情報生成部108と、簡略道路地図データおよび誘導注意情報を含む配信情報をナビゲーション端末2へ送信する通信部110と、を有する。これにより、誘導経路の視認性を向上させ、かつ誘導方向の誤認識を低減する。 (もっと読む)
41 - 49 / 49
[ Back to top ]