
Fターム[2F129BB10]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 絶対位置測位 (12,751) | 専用局 (442) | 電波航法における基地局 (49)
Fターム[2F129BB10]に分類される特許
21 - 40 / 49
統合サービスデジタル放送−地上波(ISDB−T)放送テレビジョン信号を使用した位置評定
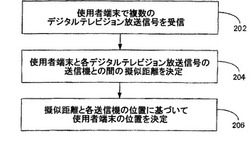
【課題】デジタルテレビジョン(DTV)送信機からのDTV放送信号に基づいて使用者の位置を決定する。
【解決手段】複数のデジタルテレビジョン(DTV)送信機からのDTV放送信号を使用者端末で受信し、使用者端末と放送DTV信号の中の既知成分に基づくDTV送信機の擬似距離を決定する。決定された擬似距離と各デジタルテレビジョン(DTV)送信機に位置に基づくて使用者端末の位置を決定する。
(もっと読む)
位置特定システム

【課題】位置特定システムにおいて、データの送受信を効率よく行う。
【解決手段】移動局は、位置を特定する情報(位置情報)を生成して、統制装置に送信する。統制装置は、移動局から受信した位置情報から基準位置を導出して、移動局に送信する。移動局は、生成した位置情報および統制装置から受信した基準位置から、移動局の基準位置に対する相対的な位置を特定して、特定した相対的な位置を移動局間で通信する。このように移動局の間では、位置情報よりも少ない情報量の情報が通信されて、移動局は、他の移動局の位置を特定することができる。
(もっと読む)
マルチプルGPS測定タイプを加重最小二乗解へと融合するための方法
GPSベースの空中ナビゲーションシステムを用いて空中航空機に対する位置データを計算する方法であって、該GPSベースの空中ナビゲーションシステムで利用可能な複数の異なるタイプの測定データを加重最小二乗アルゴリズムに融合して、該複数の異なるタイプの測定データに対する適正な共分散行列を決定することにより、相対状態関数の位置成分を処理するステップを含む方法。 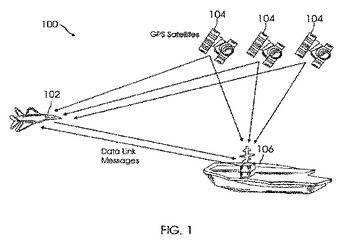 (もっと読む)
(もっと読む)
慣性航法システムを増補するシステムおよび方法
【課題】より高い頻度で、GPS信号またはレーザ信号の一方または両方がブロックされる可能性がある期間中に、正確な位置情報およびエレベーション情報を生成できる位置監視システムを提供すること。
【解決手段】慣性航法システム(INS)を増補するシステムおよび方法は、作業機に関連する位置情報をINSから出力することと、作業機の位置情報と作業機の所望の位置との比較に基づいて作業機を調整することとを含む。INSは、INSの固有の特性によって引き起こされる可能性がある位置情報のドリフトを訂正するために、ファンレーザ、オートマティックトータルステーション(ATS)、GNSS受信器、または地上ベース無線位置決めシステムなどの1つまたは複数の位置決め(または測定)デバイスからの位置情報の関数としてカルマンフィルタによって生成される誤差推定値を使用して、周期的に再初期化される。
(もっと読む)
衛星測位方法及び衛星測位システム
【課題】 減衰した衛星受信信号であっても超高感度でかつ応答性良く自己位置を知るこ
とができ、しかも、衛星の正確な位置に基づいて自己位置の計算ができ、精度が極めて高
い衛星測位方法を提供することを目的とする。
【解決手段】 衛星Sからの信号を受信すると共に外部基地局1との間において情報通信
する受信機端末11が自己位置の計算を行う衛星測位方法である。衛星Sから受信機端末11
が受信した衛星受信信号の航法データと外部基地局1から受信機端末11が受信した外部航
法データとを比較して、外部航法データの遅延時間を算出する。遅延時間に基づいて受信
機端末11が衛星受信信号を処理する際の衛星位置を推定する。推定した衛星位置に基づい
て擬似距離を求め自己位置の計算を行う。
(もっと読む)
周波数応答整合を使用した無線周波数ナビゲーション
無線ナビゲーションの方法は、多数の可能性のあるデバイス位置のそれぞれに対して周波数応答を予測する工程を含み得る。方法はまた、実際のデバイス位置において周波数応答を測定する工程も含み得る。方法は、測定周波数応答を予測周波数応答の1つと整合させて、推定デバイス位置を決定する工程であって、推定デバイス位置は、測定周波数応答に最も密接に整合する1つの予測周波数応答に関連付けられた可能性のあるデバイス位置に対応する、工程をさらに含み得る。  (もっと読む)
(もっと読む)
地図表示装置、地図表示方法およびコンピュータ・プログラム
【課題】土地勘の有無に応じた情報表示を行う地図表示装置を提供する。
【解決手段】現在位置に対応する地図情報上に表示する地名情報を、ユーザに土地勘があるか否かの判断結果に基づいて取得する。そして、現在位置に対応した地図情報を取得すると、この取得された地図情報に、判断結果に基づいて取得された地名情報が重畳して表示される。
(もっと読む)
測位装置、その制御方法、制御プログラム及びその記録媒体
【課題】非同期の通信システムにおけるRTTを併用して2次元測位を行い、位置誤差の少ない位置を出力することができる測位装置等を提供すること。
【解決手段】2個のSPS衛星についての各擬似距離と各SPS衛星の軌道情報に基づいて、測位装置20の推定位置を示す推定線を算出する推定線算出手段と、通信信号が通信基地局40と測位装置20との間を往復する往復時間と通信基地局40の位置に基づいて、測位装置20の予想位置を示す予想円を算出する予想円算出手段と、SPS衛星から各共有点への視線方向ベクトルと衛星信号の発信周波数に基づいて、予想ドップラー偏移を算出する予想ドップラー偏移算出手段と、推定線と予想円との各共有点について、予想ドップラー偏移と実測ドップラー偏移との差分を算出する差分算出手段と、小さい方の差分に対応する共有点を、測位装置が出力するための出力位置として選択する出力位置選択手段と、を有する。
(もっと読む)
全視野のコヒーレントなGPS信号擬似ランダム雑音(PRN)コード捕捉及びナビゲーション解決定のための全地球測位システム(GPS)ユーザ受信機および幾何学的表面処理
GPS装置のより強固な検出、捕捉、位置決め解能力を可能にする方法およびシステムである。システムおよび方法はGPSユーザ受信機の位置を予測するために、一度に一つのGPS信号の捕捉ではなく、同時的な全視野のコヒーレントなPRNコード信号処理方式に基づいたGPS衛星距離信号を使用する。さらに、画像処理技術、超密着結合処理技術、またはその組合せはさらにユーザ受信機の位置決定の正確性を強化するために使用される。信号処理技術はGPS衛星距離信号が個別に検出されることができないとき、或いは1または2のみの強いGPS衛星距離信号が弱い信号環境、混雑状態、その組合せにおいて個別に検出されることができるときGPSユーザ受信機の位置を決定するために使用される。 (もっと読む)
測量スティッチングを用いる位置測定方法
モバイル通信デバイスは、異なる出来事の間に取得されてもよい衛星輸送手段のような複数の参照基地局および/または基地局からの測量値を用いて初期設定されるカルマンフィルターのような測位フィルターを含む位置決定に関する方法を用いる。したがって、当該測位フィルターは、同じ測量の出来事の間の少なくとも3つの異なる信号の第1の取得を必要することなく、位置の推定値に関して用いられてもよい。 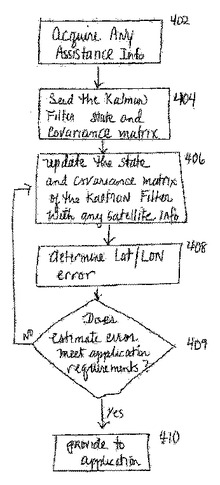 (もっと読む)
(もっと読む)
運転支援システムおよび運転支援方法
【課題】運転者に対する注意喚起を促しつつも、運転者が感じる煩わしさを低減する。
【解決手段】走行履歴に基づいて、交差点走行時の運転者の運転行動を評価する運転行動レベルを推定し、また、走行履歴に基づいて、この運転行動に対する運転者の意図を運転行動意図として推定する。そして、推定された運転行動レベルと運転行動意図とに基づいて、運転者に提示する情報の提示頻度を設定する。
(もっと読む)
情報処理装置及び補正値複合方法及びプログラム
【課題】差動衛星測位方式による測位の精度を向上することを目的とする。
【解決手段】補正値生成局200において、基準局通信局210は各基準局100から観測値を収集する。生成局220は各基準局100の観測値を基に各基準局100の補正値を生成する。さらに複数種設定した基準局の組合せに対して、その組合せ内で各基準局の補正値を比較して基準局に依存する異常値を検出し除去する。さらに生成局220は、異常値が除去された補正値をその組合せ内で複合して高品質な複合補正値を生成する。移動局300または補正値生成局200は、移動局300の概略位置を囲むような基準局の組合せを抽出する。その組合せリストの中から、過去にその移動局300に対して配信した複合補正値の基準局組合せと比較して閾値以下の数だけ異なる基準局組合せを選択する。その複合補正値を移動局300に配信する。
(もっと読む)
測位システム、測位方法及びカーナビゲーションシステム
【課題】受信可能なGPS衛星の数が十分でなくても移動体の位置を精度よく測位可能な測位システム、カーナビゲーションシステムを提供すること。
【解決手段】人工衛星から発信される電波を利用した測位と自律航法による測位とを協調制御して、移動体の位置を推定する測位システム10において、捕捉された人工衛星が3未満の場合、電波を利用して測位された範囲から、自律航法により測位された慣性測位位置との距離が最小となる地点を抽出し、当該地点を電波を利用して測位された衛星測位位置と推定することを特徴とする。
(もっと読む)
測位システム,測位演算装置,及び測位システム用回路
【課題】複数の航法システムにより相互に独立したタイミングで得られる測位データに基づいて、精度良く測位演算を行う測位システム,測位演算装置,及び測位システム用回路を実現する。
【解決手段】測位システム1は、擬似距離データを出力する衛星捕捉追尾回路11と、センサデータを出力するセンサ5と、それらに対して共通の時間情報を発生する時間情報発生部13と、を備えている。この測位システム1は、各々の測位データに、測位演算に先立って、時間情報を関連付けておく。そして、測位システム1は、測位演算回路20で、時間情報が関連付けられた測位データ間の時間的整合性を図りつつ測位演算を行う。
(もっと読む)
作業機械の位置計測システム
【課題】作業機械の位置計測システムにおいて、作業機械の3次元空間での位置と姿勢及びモニタポイントの絶対位置を演算、表示する際に、車体が静止した状態にあるときは表示のふらつきを低減し、車体が静止した状態にないときは表示の追従性の低下を抑え、ひいては作業効率を向上させる。
【解決手段】GPSアンテナ31,32の3次元位置に基づいて上部旋回体3の位置及び姿勢をグローバル座標系の値で求め、この値のローパスフィルタリング処理を行う。このとき、油圧ショベル1が旋回又は走行をしている場合は、ノイズ成分除去のための高いカットオフ周波数で、そうでない場合は、表示の変動を抑えるための低いカットオフ周波数でローパスフィルタリング処理を行う。この演算値を元に、モニタに地形に対する油圧ショベル1の位置関係を重ね合わせて表示する。
(もっと読む)
GPS測位精度早期安定化方法
【課題】橋梁や歩道橋などの物体が存在する道路においても常に高精度の現在位置表示が得られようにしたGPS測位精度早期安定化方法を提供すること。
【解決手段】道路にある歩道橋やトンネルなどの構造物100の出口105の近傍に、GPSアンテナ102とリピータアンテナ103を備えたリピータ101を設け、構造物100の下の道路を走行している自動車などの移動体200が出口105の近傍にきたとき、GPS衛星からGPSアンテナ102で受信した電波を、リピータアンテナ103を介して当該移動体200に中継し、移動体200に搭載したGPS受信機210による位置算出処理が、移動体200が構造物100を通過する際、その手前から開始されるようにし、GPS衛星からの電波を直接受信できる場所に移動体100が移動した際、GPS受信機が算出する位置の精度が早く復帰されるようにした。
(もっと読む)
歩行者の動態検知装置
【課題】
上下移動を伴う歩行動態を正確に認識できる装置がなかった。また、上下移動を伴う歩行動態では、平面歩行とは異なる歩幅で歩く事になるがそれを検知する装置がなかった。
【解決手段】
高度変化を検知するセンサと平面での歩行動態を検知する装置を組合せ上下移動を考慮した歩行動態を検知する。
【効果】
本発明によれば、上下移動を伴うような歩行動態が認識できるようになる。さらに、歩幅を正確に検知できるようになり精度の高い位置検知が可能になる。また、歩行動態と地理情報を比較して地理上のどこにいるかを推定できるようになる。
(もっと読む)
ナビゲーション装置、その制御方法及び制御プログラム
【課題】ナビゲーションの技術において、外部から受信するVICS等の規制情報により通常と異なる経路がひかれた場合に、原因となった規制など関連情報につき点滅表示等でユーザへ明示し早期に注意喚起することにより、大きな迂回を極力抑制する。
【解決手段】交通情報取得部45が、情報受信部13、14から道路の交通状況を表すVICS等の交通情報を取得すると、交通情報判断部47が、取得した前記交通情報が案内経路上のものどうかを判断する。交通情報(規制情報)が案内経路上と判断された場合、新経路計算部43が、前記交通情報に係る地点を通過せずに目的地に到達する新経路を計算する。情報表示部49が、もとの前記案内経路及び計算された新経路とともに、取得された交通情報のうち新たな経路を計算する原因の交通規制等の地点に、前記原因の存在を表すアイコンなどのマークを点滅により強調表示する。
(もっと読む)
現在位置算出装置
【課題】電波航法による計測を行えない期間の経過後に、より適正に現在位置を算出することのできる「現在位置算出装置」を提供する。
【解決手段】前回以前に最後にGPS受信機4から測位データを取得した回nに出力した現在位置Fnから、回nにGPS受信機4で求めた移動方向θ1と、今回n+mにGPS受信機4で求めた移動方向θ2の平均として求まる方向に、回nにGPS受信機4で求めた移動速度Vnと今回n+m、GPS受信機4で求めた移動速度Vn+mの平均として求まる速度で、回nから今回n+mまでの経過時間分移動した位置を今回の予測位置Cn+mとして算出し、その周囲に予測範囲Bn+mを設定する。そして、今回GPS受信機4で求めた測位位置が、予測範囲内に含まれる場合には、当該測位位置を現在位置として出力し、そうでない場合には、予測位置を現在位置として出力する。
(もっと読む)
測位データ処理方法
【課題】 測位センサの一部から測位データが得られなくなっても、複数の測位データの組み合わせ演算で得られる位置データに位置跳びの影響が出ることを回避でき、安定した制御を行うことができる測位データ処理方法を提供する。
【解決手段】 船舶又は浮体の位置制御において、複数の測位センサ1〜Nで検出される複数の測位データXaniに対して、それぞれドリフト補正を行い、該ドリフト補正を行った後のドリフト補正後測位データXcniに対して、それぞれの時系列データのバラツキに応じた加重平均処理を行って、位置制御のための位置データXciを得る。
(もっと読む)
21 - 40 / 49
[ Back to top ]