
Fターム[2F129BB24]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 相対位置測位 (18,278) | 角速度センサ (5,830) | ロール (137)
Fターム[2F129BB24]に分類される特許
61 - 80 / 137
車両姿勢角推定装置及びセンサドリフト推定装置
【課題】ドリフト誤差による影響を軽減して、精度よく姿勢角を推定することができるようにする。
【解決手段】前後車体速度を推定する前後速度推定手段12と、横車体速度を推定する横速度推定手段10と、ピッチ角速度を推定するピッチ角速度推定手段24と、ロール角速度センサ20及び上下加速度センサ14からのセンサ信号について、初期不感帯を設定するように補正する初期不感帯補正手段23と、各センサ信号、補正されたロール角速度センサ20及び上下加速度センサ14からのセンサ信号、前後車体速度の推定値、並びにピッチ角速度の推定値に基づいて、ロール角及びピッチ角を推定する姿勢角オブザーバ26と、を備えている。ピッチ角速度推定手段24は、前後車体速度の推定値、横車体速度の推定値、補正されたロール角速度及び上下加速度の各検出値、並びに推定されたロール角及びピッチ角の前回推定値に基づいて、ピッチ角速度を推定する。
(もっと読む)
ナビゲーションシステムおよび地点の選択方法

【課題】電子ペンなどの携帯入力装置と地図の印刷物とを好適に用いることで、ユーザが所望する施設を、ユーザがその施設の詳しい位置や正確な名称などを知らなくとも容易に、ナビゲーション本体において指定すること。
【解決手段】ナビゲーションシステム1は、印刷物5に印刷された地図11中の範囲を指定する携帯入力装置4と、ナビゲーション本体2と、を有するものである。そして、ナビゲーション本体2は、携帯入力装置4により指定された範囲内に関連付けられている施設を表示する表示手段56と、表示手段56に表示された施設の内から、所望の地点を選択する選択手段68と、を有する。
(もっと読む)
ナビゲーションデータを三次元で表示するコンピュータ装置および方法
本発明は、プロセッサ(11)および当該プロセッサ(11)へアクセス可能なメモリ(12、13、14、15)を備えるコンピュータ装置に関する。メモリは、前記プロセッサ(11)に、(a)ナビゲーション情報を取得させる、(b)そのナビゲーション情報に対応する画像を取得させる、(c)その画像およびそのナビゲーション情報の少なくとも一部を表示させるように構成されたデータおよび命令を備えるコンピュータプログラムを備え、そのナビゲーション情報の少なくとも一部はその画像に重ね合わせられる。プロセッサ(11)は、(b1)その画像に対応する深さ情報を取得し、その深さ情報を使用してアクション(c)を実行することをさらに許可される。  (もっと読む)
(もっと読む)
移動体用測位装置
【課題】本発明は、移動体のリアルタイムの位置を、高精度で測位する移動体用測位装置を提供することを目的とする。
【解決手段】現在時刻における移動体の位置を測位し、所定の出力周期で出力する移動体用測位装置100であって、
前記現在時刻が、GPS演算データ更新時には、GPS演算データ、慣性航法測位手段30、速度検出手段40及び誤差補正手段50を用いて前記移動体の初期位置を算出し、該初期位置算出の際に算出された補正値を用いて、移動体モデル演算手段60が前記現在時刻までの移動体モデルを演算して前記移動体の位置を測位し、
前記現在時刻が、前記GPS演算データ更新時と異なったときには、前記慣性航法測位手段、前記速度検出手段及び前記誤差補正手段を用いて前記移動体の初期位置を算出し、該初期位置算出の際に算出された補正値を用いて、前記移動体モデル演算手段が前記現在時刻までの移動体モデルを演算し、前記移動体を測位することを特徴とする。
(もっと読む)
位置及び経路地図生成データ取得解析システム
【解決手段】位置及び経路地図を表示するための位置及び経路地図データを生成する装置、システム、及び方法を開示する。この装置(20)は、物体の姿勢に関する複数の第一のデータ信号を生成する一組の第一センサ(14)と、この物体の姿勢に関する複数の第二データ信号を生成する一組の第二センサ(16)と、最重要特徴物を含んだ複数の第三データ信号を生成する撮像装置であって、最重要特徴物はこの撮像装置(17)による少なくとも2枚の画像内に配置される、撮像装置と、少なくとも一つの処理装置(11)であって、複数の第一データ信号及び複数の第二データ信号を用い自装置の進行方向(方位)を算出し、複数の第三データ信号を用い進行方向に沿った移動距離を算出し(85)、算出された進行方向及び移動距離を、二次元又は三次元システム上に視覚表示される経路地図の一区間又は区間の一部に変換するように構成される処理装置とを含む。 (もっと読む)
車両検索システム
【課題】携帯機の姿勢に依らずに常時車両の方向を正しく認識することができる車両検索システムを提供すること。
【解決手段】車両検索システム1は、携帯機2から観た絶対方位を検出する電子コンパス22と、携帯機2の姿勢を検出するジャイロセンサ29と、車両3から観た携帯機2の相対方向を検出すると共に当該車両3に到来する到来電波の電波強度Eaを測定するアレーアンテナ33a,33dと、車両3から観た絶対方位を検出する電子コンパス32と、携帯機2の相対方向の情報と車両3から観た絶対方位の情報とに基づき、車両3から観た携帯機2の絶対方向を演算する車両側制御部31と、同車両3から観た携帯機2の絶対方向、携帯機2から観た絶対方位、及び携帯機2の姿勢の各情報に基づき、同携帯機2から観た車両3の相対方向を演算する携帯機側制御部21と、同車両3の相対方向を3次元表示する表示部25とを備えている。
(もっと読む)
ナビゲーション装置、ナビゲーション方法、及びプログラム
【課題】簡単な作業により、検索条件を設定すること。
【解決手段】ナビゲーション本体14は、自動車の道路案内に用いられる。ナビゲーション本体14は、地図と位置情報とが重畳して印刷されている用紙21から、電子ペン12によって読み取られた上記位置情報に基づいて、電子地図上の経路を検索する。例えば、上記電子ペン12の上記用紙21に対する筆記軌跡に基づいて、出発地点と目的地点が設定される。そして設定されたその上記出発地点から上記目的地点までの経路が検索される。本発明は、自動車などの車両にナビゲーション本体が設置されるナビゲーションシステムにおいて好適に利用することができる。
(もっと読む)
ナビゲーション装置、操作部表示方法
【課題】運転者の特性に応じて各運転者の操作性を向上させることができるナビゲーション装置及び操作部表示方法を提供すること。
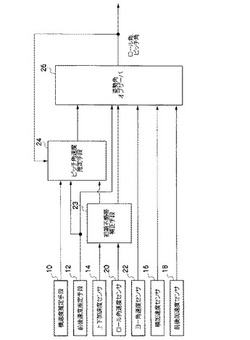
【解決手段】表示部28に表示された操作部A〜Eの接触位置により操作されるナビゲーション装置100において、走行時の車両操作を検出する車両操作検出手段11、12、13と、車両操作検出手段が検出した車両操作に基づき、運転者操作情報を取得する車両操作取得手段21と、運転者操作情報に基づき運転者の運転者特性を学習する運転者特性学習手段23と、運転者特性学習手段23が学習した学習結果に応じて、操作部A〜Eの表示態様を変更する操作部生成手段24と、を有することを特徴とする。
(もっと読む)
ナビゲーションディスプレイの開閉制御装置
【課題】車両に搭載されるナビゲーション装置と連係するナビゲーションディスプレイの開閉を詳細に制御する。
【解決手段】ナビゲーションディスプレイの開閉制御装置10を、車両に搭載され、少なくとも表示画面での表示または表示画面でのナビゲーション装置1に対する操作入力の検出をおこなう表示装置52と、表示装置52の開閉ディスプレイを電動により開閉する開閉機構15と、車両の走行モードとして通常走行モードとスポーツ走行モードとを切り替えて実行する走行モード切替部23と、開閉ディスプレイの開状態において走行モード切替部23によって車両の走行モードが通常走行モードからスポーツ走行モードへと切り替えられた場合に、開閉機構15によって開閉ディスプレイを開状態から閉状態へと切り替える開閉制御部24とを備えて構成した。
(もっと読む)
カルマンフィルタ処理における繰り返し演算制御方法及び装置
【目的】少ない繰り返し演算回数で高精度の位置、速度等の推定を可能にする「カルマンフィルタ処理における繰り返し演算制御方法及び装置」を提供することである。
【構成】車両の位置、速度及びセンサーの姿勢を含む状態量を推定するカルマンフィルタ処理において、カルマンフィルタ処理部14は車両の位置、速度及びセンサーの姿勢を含む状態量を演算し、カルマンフィルタ繰り返し演算停止制御部22は、演算された状態量のうち所定の状態量あるいは該状態量に応じた値について前回と今回との差分を演算し、該差分が前回の差分より大きくなったとき、あるいは、該差分が設定値以下になったとき、カルマンフィルタ処理部14による状態量の繰り返し演算を停止し、補正状態量出力部21はカルマンフィルタ処理部14により演算された状態量を補正状態量として出力する
(もっと読む)
測位方法、プログラム及び測位装置
【課題】慣性航法用センサの検出結果に含まれる誤差を補正するための新たな手法を提案
し、より正確な現在位置の測位を実現すること。
【解決手段】カーナビゲーション装置1において、カーナビ用ジャイロセンサ61の検出
結果を積分することで、地球に対する慣性航法用センサ60の絶対姿勢の推定値である推
定絶対姿勢が算出される。そして、移動体座標系と基準座標系との座標変換行列が推定絶
対姿勢に基づいて算出され、当該座標変換行列を用いて、カーナビ用加速度センサ63の
検出結果が基準座標系に変換されるとともに、重力加速度の成分が減算されることで、基
準座標系における自動車の移動ベクトルが算出される。そして、この移動ベクトルを用い
て現在位置が測位される。
(もっと読む)
ナビゲーション装置
【課題】マルチコアプロセッサ上でプログラムを動作させる場合に、プログラムの処理時間の短縮を図ることができるナビゲーション装置を提供する。
【解決手段】ナビゲーションプログラムを構成するプログラムのうちリアルタイム性よりも高スループットを高めることが要求される地図更新プログラム或いはセキュリティプログラムをSMP型プログラムとして構成した上でコアC2,C3に割当て、それらのプログラムを起動する場合は、コアC2,C3をTSPMモード(機能分散動作モード)からTTSMモード(負荷分散動作モード)に切換える。これにより、AMP型プログラムを割当てられた1つのコア上で動作させる従来構成と比較して、プログラムの処理時間の短縮を図ることができる。
(もっと読む)
標定装置、標定方法および標定プログラム
【課題】車両の位置姿勢を標定できるようにする。
【解決手段】消失点抽出部120は、画像センサ104により車両から撮像された画像204に基づいて画像204に映っている白線の消失点実測値205を算出する。航法演算部110は、慣性センサ101とオドメトリ102とにより計測された角速度201と速度202とに基づいて車両の自己姿勢角207と自己位置206とを計測する。データベース検索部130は自己位置206と自己姿勢角207とに基づいて画像204に映っている白線の白線座標203を取得する。消失点計算部140は白線座標203と自己姿勢角207とに基づいて消失点予測値208を算出する。カルマンフィルタ部160は消失点実測値205と消失点予測値208との差分である消失点残差209に基づいて姿勢誤差推定量210を算出する。そして、航法演算部110は自己姿勢角207を姿勢誤差推定量210により補正する。
(もっと読む)
測位方法、プログラム及び測位装置
【課題】現実的な移動体の移動を想定した適切な誤差推定を実現する測位方法等を提供す
ること。
【解決手段】慣性航法演算処理により随時求められる相対高度である第1高度変化「Δh
i」と、移動体である自動車の外気圧を検出する気圧センサの検出結果に基づいて算出さ
れる相対高度である第2高度変化「Δhb」との差「δh=Δhi−Δhb」が算出される
。そして、算出された高度変化の差「δh」、慣性航法演算処理により求められる自動車
の直進方向に対する左右方向の速度「vix」、及び、慣性航法演算処理により求められる
自動車の高度方向の速度「viz」に応じた観測値を用いたカルマンフィルタ処理が行われ
て、慣性航法演算処理の演算結果「(pi,vi,Ai)」に含まれる誤差「(δp,δv
,ε)」が推定され、推定された誤差を用いて慣性航法演算処理の演算結果が補正されて
、自動車の現在位置が測位される。
(もっと読む)
航法装置
【課題】角速度センサの角速度バイアスを温度の関数として求める方法の利点と、時系列に推定する方法の利点とを併せ持ち、移動中リアルタイムに角速度バイアスを推定して高い測位精度を保てるようにした航法装置を構成する。
【解決手段】航法装置100は、GPS受信機11、振動ジャイロからなる角速度センサ13、温度センサ14、加速度センサ12、CPU等からなる統合演算部30を備えている。統合演算部30の角速度バイアス温度特性検知部22は、移動体の停止時の温度検出値と角速度の検出値とに基づいて角速度バイアスの温度特性データを求め、バックアップ部23に書き込む。GPS/INS演算部21は、角速度バイアスの温度特性データが有効であるとき、角速度センサの温度特性と温度とから求めた角速度バイアスを初期値としてGSP/INS統合演算を行い、角速度バイアス及び角速度をリアルタイムに推定して、移動体の方位を高精度に求める。
(もっと読む)
複合センサー
【課題】高感度なモーションセンサーとして三軸検知可能であり、また磁界センサーとして使用可能で、簡便な構成で、小型で、かつ低消費電力の複合センサーを提供すること。
【解決手段】傾斜面を有する基板の前記傾斜面に設けられた磁気検知素子と、前記基板上に梁により支持され3軸方向の自由度を有する錘を有する磁界発生部とを備えた複合センサーであって、
前記磁気検知素子により第1の物理量の外部磁界を検知可能であると共に、
前記錘を有する磁界発生部の位置変動による前記磁気検知素子の出力の差に基づいて第2の物理量を検知することを特徴とする。
(もっと読む)
地図情報画面操作装置、地図情報画面操作方法
【課題】所定地点の道路地図を短時間で表示する地図情報画面操作装置及び地図情報画面操作方法を提供すること。
【解決手段】道路地図を表示装置17に表示する道路地図表示手段22、24と、道路地図の所定地点を記憶する所定地点記憶部26と、表示装置17に表示された道路地図を所定の方向にスクロールさせるスクロール手段27と、スクロール手段による道路地図のスクロールを検出して、表示される道路地図を所定地点の周辺の道路地図にジャンプさせるスイッチ31を表示装置17に表示するスイッチ生成手段231と、を有する地図情報画面操作装置100を提供する。
(もっと読む)
車載用装置および車載用装置の制御方法
【課題】ユーザの安全性を高めつつ、装置の利便性を向上させることが可能な車載用装置を提供すること。
【解決手段】車載用装置1は、車両外の状況および/または車両内の機器の状況および/または車両に関する状況のうちの2つ以上の状況を判断する判断手段27と、判断手段27で判断された2つ以上の状況に基づいて、車両内の対象機器15を段階的に制御する機器制御手段28とを備えている。この車載用装置1では、2つ以上の状況の判断結果に基づいて、ユーザの安全性を確保しつつも、必要以上に対象機器15の操作や動作が制限されないように、対象機器15を制御することができる。
(もっと読む)
動的に較正されるセンサデータと、ナビゲーションシステム内の繰り返し拡張カルマンフィルタとを使用する、ジャイロコンパスの整合用のシステム及び方法
【課題】動的に校正されるセンサデータと、ナビゲーションシステム内の繰り返し拡張カルマンフィルタとを使用して、ジャイロコンパスを整合させる。
【解決手段】ナビゲーションシステムは、慣性測定装置及び位置決め装置によって提供される第1及び第2のデータセットを受信するように構成される処理装置を備え、処理装置は、受信された第1のデータセットを動的に較正するように構成され、カルマンフィルタを備え、最初に動的に較正された第1のデータセット、第2のデータセット、及びカルマンフィルタを使用してジャイロコンパスの整合を生成するようにさらに構成される。本方法は、複数のセンサからセンサデータを受信すること、センサデータの少なくとも一部を動的に較正すること、動的に較正されたセンサデータに基づいてジャイロコンパスの整合情報を生成することを含む。
(もっと読む)
移動量計測装置及び位置計測装置
【課題】簡易な構成で、ロバスト性を確保して、移動体の移動量を精度よく計測することができるようにする。
【解決手段】GPSから、第1時刻及び第2時刻の各々で測定された測位位置と、第1時刻及び第2時刻の各々における受信信号の衛星番号群とを取得し(140)、第1時刻における衛星番号群と、第2時刻における衛星番号群とが同一である場合には(144)、第1時刻及び第2時刻で測定された測位位置の変化に基づいて、自車両の車速を算出する(146)。第1時刻と第2時刻とにおいて受信信号の衛星番号群が同一でない場合には(144)、過去の衛星番号群から、第2時刻における衛星番号群と同一の衛星番号群である時刻を検索し(148)、検索された時刻に測定された測位位置と、第2時刻における測位位置とに基づいて、自車両の車速を算出する(152)。
(もっと読む)
61 - 80 / 137
[ Back to top ]