
Fターム[2F129BB24]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 相対位置測位 (18,278) | 角速度センサ (5,830) | ロール (137)
Fターム[2F129BB24]に分類される特許
121 - 137 / 137
ナビゲーション装置
【課題】情報記録媒体より取得した情報に基づき目的地を設定する場合に、ユーザに時間的損失を与えてしまうことを回避可能なナビゲーション装置を提供する。
【解決手段】カーナビゲーション装置1の制御回路2は、QRコードより取得した施設や店舗等の情報を、当該QRコードに記録されている有効期限に基づき有効性を判断し、有効性が無いと判断すると、携帯電話機10を介してQRコードに記録されているURLにアクセスすることで代替情報を取得する。
(もっと読む)
カーナビゲーション装置

【課題】カーナビゲーション装置において、車両が駐停止した場合には、経由地に立ち寄るための駐停止もあることに鑑み、車両を再走行させるときに、その駐停止位置近くに存在する未通過の経由地を通過経由地候補としてユーザに通知し、その経由地に立ち寄った旨の入力がなされたときには、その経由地を除いて新たな案内経路を再設定する。
【解決手段】駐停車位置で再出発すべくイグニッションスイッチ18をオンすると、カーナビゲーション装置1が現在位置と現在の案内経路中の経由地との間を地図データに基づいて演算し、所定距離以内ならば、その経由地に立ち寄ったか否かをユーザに問い合わせる。経由地に立ち寄ったとの入力があった場合、カーナビゲーション装置は、その経由地を除いて目的地までの新たな案内経路を再設定する。
(もっと読む)
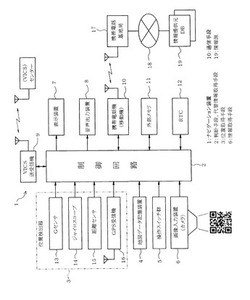
方位測定装置および方位測定システム
【課題】迅速に磁気センサの残留磁気値を取得することができ、正確に船首方向の方位を測定することが可能な方位測定装置および方位測定システムを提供する。
【解決手段】磁気センサコンパス3は、3軸磁気センサ38が検出した検出磁気値から残留磁気値を減算した検出磁気真値に基づいて船首方位ψmを算出する。残留磁気値は、3軸磁気センサ38が検出した検出磁気値と、地磁気データ記憶部22が記憶する地磁気データに基づいて取得された標準の地磁気の値とに基づいて算出される。衛星測位コンパス2は、衛星受信部34aおよび34bが受信した信号に基づいて船首方位ψsを算出する。選択部10は、衛星受信部34aの受信状況が良好であるときは、船首方位ψsを船首方位ψとして船首方位表示部12へ入力し、衛星受信部34aの受信状況が良好でないときは、船首方位ψmを船首方位ψとして船首方位表示部12へ入力する。
(もっと読む)
キャリア位相相対測位装置及び方法
【課題】
整数バイアス解の再決定時のみならず、電源投入直後における最初の整数バイアス解の決定時においても、移動体の姿勢情報を用いて整数バイアス候補解の検定を行うことができるキャリア位相相対測位装置及びその方法を提供することを目的とする。
【解決手段】
衛星から送信される測位用信号を受信するために、移動体上に固定された複数のアンテナ1と、加速度及び角速度を計測する慣性センサ3を備えたキャリア位相相対測位装置において、少なくとも最初の整数バイアス解の決定前に、慣性センサ3の観測量を用いて移動体の姿勢情報を算出する基準姿勢演算部6を設け、整数バイアス検定部7により、基準姿勢演算部6で算出した姿勢情報を用いて、整数バイアス推定部4で推定した整数バイアス候補解の検定を行うことを特徴とする。
(もっと読む)
状態推定装置及びそのプログラム、並びに、統合状態推定システム及び統合状態推定装置
【課題】 複数の状態推定動作を並列動作させることで推定処理の高速性、信頼性、汎用性を高めた統合状態推定システムを提供する。
【解決手段】 統合状態推定システムSは、通信路(ネットワークN)を介して、複数の状態推定装置10を備え、各状態推定装置10が、それぞれ推定した観測対象の状態(状態量X)を送受信し合うことで状態量Xを統合し、少なくとも一つの状態推定装置10が、観測対象の状態を示す推定量Eを出力することを特徴とする。
(もっと読む)
角速度センサの零点補正装置および補正方法
ロボット等の運動体に角速度センサ(10)が設けられる。第1設定器(14)は角速度の変化幅が所定幅以下であるか否かで静止状態を判定し、静止判定器(20)は判定時間を超えて静止状態が継続しているか否かを判定する。総和平均器(34)は、静止状態と判定された期間のn個のデータのうち、終了タイミング直前のi個のデータを除いた(n−i)個のデータの総和平均を算出して零点オフセットとする。零点補正器(36)は、出力値を零点補正して出力器28に出力する。 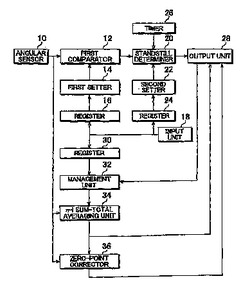 (もっと読む)
(もっと読む)
傾斜角算出装置及びナビゲーション装置
【課題】 車両自体の傾斜角を求めて、道路のみの傾斜角を正確に算出可能とする。
【解決手段】 ナビゲーション装置1は、車両の前後に取り付けるステレオカメラ10、11を具備し、水平的な姿勢における各ステレオカメラ10、11による算出距離に対応した基準距離D1、D2及び各ステレオカメラ10、11のレンズ中心間の水平距離を記憶部9に予め記憶している。各ステレオカメラ10、11が撮像した画像情報に基づき画像演算処理部8は地面までの距離を求め、求めた距離と基準距離との差及びレンズ中心間の水平距離等より三角関数を用いて車両自体の傾斜角(車両傾斜角)を算出する。算出した車両傾斜角で3Dジャイロセンサー5の検出結果より求めた傾斜角を補正して道路のみの傾斜角を得る。
(もっと読む)
ナビゲーション装置
【課題】 装置の取り付けの簡素化、安全性の向上を図ることができるナビゲーション装置を提供する。
【解決手段】 車両の進行方向における加速度を検出する加速度センサ101と、車両のヨー動作方向の角速度を検出するジャイロセンサ3とを備え、演算手段109は、まず加速度センサ101により得た加速度情報より速度および走行距離△Dnを計算し、ジャイロセンサ102により得た角速度情報より移動方位
θznを計算し、求めた走行距離△Dnと移動方位θznと車両の位置を求める。
(もっと読む)
携帯装置で使用するためのパーソナルナビゲーション装置
ユーザによって使用されるナビゲーションシステムは、ナビゲーションユニットと携帯装置とを含む。ナビゲーションユニットは、ナビゲーション関連出力を生成する。ナビゲーションユニットは、無線通信リンクを介して携帯装置にナビゲーション関連出力を送信する。携帯装置は、ナビゲーション関連出力を受信し、それによって実施される処理のためにナビゲーション関連出力の少なくとも一部を使用する。一実施形態では、携帯装置は、携帯装置のユーザからユーザ入力を受信するための入力インターフェースを含む。このような一実施形態では、携帯装置は、無線通信リンクを介してナビゲーションユニットにナビゲーション関連入力を送信し、ナビゲーションユニットは、ナビゲーション関連出力を生成するため、ナビゲーション関連入力の少なくとも一部を使用する。 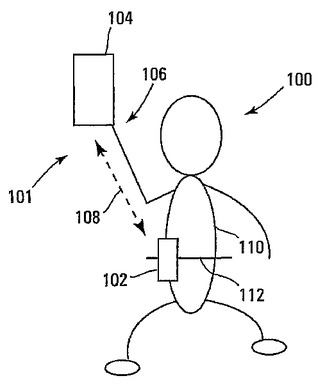 (もっと読む)
(もっと読む)
地図表示装置及び地図表示方法
【課題】よりサービス性に富んだ位置情報管理システムを提供する。
【解決手段】携帯端末11は、GPSによる位置測定、携帯電話またはPHSの基地局による位置測定、電波マーカー33による位置測定、及び方向検出器20による自立的位置測定と複数の位置測定手段を有しており、どのような場所でもナビゲーションを行うことが出来るようになっている。携帯端末11からは、同じく携帯端末11を有している第3者の位置をセンターシステム10に問い合わせることにより知ることが出来、徘徊老人や子ども、スキー場でのスキーヤーの行動監視等を行うことができる。携帯端末11には、所持者がよく使う地域の地図データのみがコンパクトに保持されており、この地図データにない地域に行ったときは、センターシステム10から対応する地データをダウンロードして使う。
(もっと読む)
地理的軌道の軌跡を割り出すための方法
所定の出発位置と所定の終点位置とを有する地理的軌道の軌跡を割り出すための方法は、装置の移動の間に物理的測定データをサンプルとして収集する車載同期センサ一式を備えているデータ収集装置を、前記出発位置から前記終点位置まで移動させるステップと、収集した測定データにもとづき、方位プロファイル、ピッチ・プロファイル、距離プロファイルおよびロール・プロファイルを割り出すステップと、前記方位プロファイル、前記ピッチ・プロファイル、前記距離プロファイルおよび前記ロール・プロファイルにもとづいて前記軌跡を割り出すステップとを有している。出発位置から終点位置までの装置の移動の間、前記物理的測定データのすべてが記憶される。記憶された測定データの取り出し後でかつ前記プロファイルの割り出しの前に、この方法は、前記一式のうちの第1および第2のセンサの測定データにそれぞれもとづいて、第1および第2の軌道パラメータをそれぞれ割り出し、第1の軌道パラメータを第2のパラメータにマッピングするステップと、該マッピングにもとづいて、第1および第2のセンサの測定データの誤差補償を決定するステップと、誤差補償によって第1および第2のセンサの測定データを補正するステップをさらに有している。 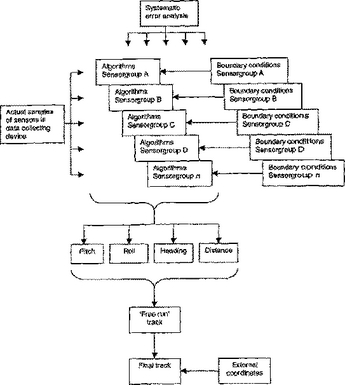 (もっと読む)
(もっと読む)
高度なナビゲーション性能のための方法およびシステム
ナビゲーションのための方法およびシステムが開示される。一実施例においては、地上局の視野内におけるGPS衛星からのデータがイリジウム衛星などのLEO衛星に再伝送され、必要であれば、ユーザに伝送される前に相互リンクされる。次いで、ユーザは、干渉またはジャミングによるエラーを解決するために、GPS衛星から直接受取ったデータとフィードフォワードされたデータを組合せることができる。代替的には、方法は、ユーザ装置において少なくとも1つの搬送波信号を受信するステップを含み、各々の搬送波信号は別個のLEO衛星によって伝送される。ユーザ装置は、第1の搬送波位相情報を得るよう搬送波信号を処理する。ユーザ装置は、慣性基準ユニットにおいて得られる慣性位置決定を再現する。ユーザ装置は、慣性位置決定および第1の搬送波位相情報に基づいてユーザ装置の位置を導き出す。 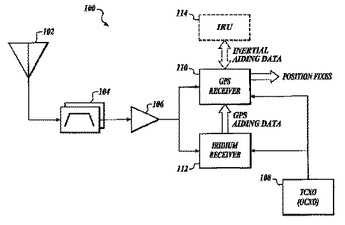 (もっと読む)
(もっと読む)
船舶の制御システムを検査するための方法及びシステム
船舶(4)の制御システム(2)を検証するための方法であって、上記制御システム(2)は、その動作状態において、センサ(8)からのセンサ信号(7)及びコマンド入力装置(10)からのコマンド信号(9)を受信するとともに、応答として、制御信号(13)をアクチュエータ(3)に対して供給することにより、上記船舶(4)の所望の位置、速度、進路又は他の状態を維持する方法において、時間(t0)中に、実際のセンサ信号(実センサ信号)(7a、7b、7c、……)の受信を切り離して、上記実際のセンサ信号を、検査信号源(41)からの人工の測定値(7a’、7b’、7c’、……)の検査シーケンス(T0)と置き換えるステップと、人工のセンサ信号(7、7’)に基づいて上記制御システム(2)を機能させて、上記第1の時間(t0)における上記第1の検査シーケンス(T0)に対する応答(SO)として制御信号ロガー(42)に記録される制御信号(13’)を生成するステップと、検査シーケンス(T0)に対する応答(S0)を上記制御システム(2)の「署名」応答(S0)として記憶するステップとを含み、その後の時間(t1、t2、t3、……)において、制御システム(2)に対して入力される検査シーケンス(T0)を使用して、その後の応答(S1、S2、S3、……)を記録するとともに、上記その後の応答(S1、S2、S3、……)が署名応答(S0)にほぼ類似しているかどうかを決定して、上記制御システム(2)が変更されているか否かを検証するという目的をもっていることを特徴とする方法。  (もっと読む)
(もっと読む)
距離算出装置および算出プログラム
移動物体と対象物との間の方位角や、速度、ヨーレートなどの各種の状態量に基づいて、移動物体と対象物との間の距離を正確に算出することを目的とする。算出装置1は、移動物体と対象物との間の方位角を算出する手段2と、2つの時点間の移動物体の移動距離を算出する手段3と、移動方向の角度変化量を算出する手段4と、手段2、手段3、手段4の出力を用いて移動物体から対象物までの直線距離を算出する手段5とを備える。 (もっと読む)
水中の物体の位置をリアルタイムで決定するための方法および装置
様々なサンプリングレートで動作する多数のセンサを使用して水中の物体の位置決定をリアルタイムで達成するため、および中でも特に、検査業務を実行するために、決定された位置をリアルタイムで使用するための方法および装置が開示される。 (もっと読む)
慣性システム用の入力された位置合わせデータを使用する慣性GPSナビゲーションシステム
慣性(「INS」)/GPS受信機は、それが、始動中に動いているときには、入力された位置合わせデータを使用してINSサブシステムの位置合わせを決定する。位置合わせデータは、パラメータ化された表面情報、測定されたGPS速度、及び、受信機が搭載されている乗物と、慣性測定ユニット(「IMU」)の加速度計及びジャイロスコープに関連する慣性測定基準、または、ボディ、フレームとの間の既知のまたは既定の角度関係から決定される。制約をもたらすパラメータ化された表面情報は、受信機を収容している乗物が移動している表面の配向とすることができる。受信機は、初期のGPS位置を使用して、パラメータ化された表面上、したがって、既知の表面の配向上の乗物の位置を決定する。受信機は、次に、関連するGPS速度ベクトルを使用して、表面上の乗物のロール、ピッチ、及び方位を決定する。その後、受信機は、乗物の計算されたロール、ピッチ、方位、及び、乗物とIMUボディフレームとの間の既知のまたは既定の角度関係を使用して、IMUボディフレームを受信機によって使用される計算上のフレームまたは基準フレームに関連付ける回転行列を決定する。 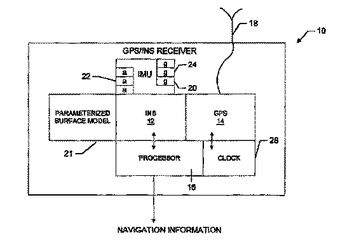 (もっと読む)
(もっと読む)
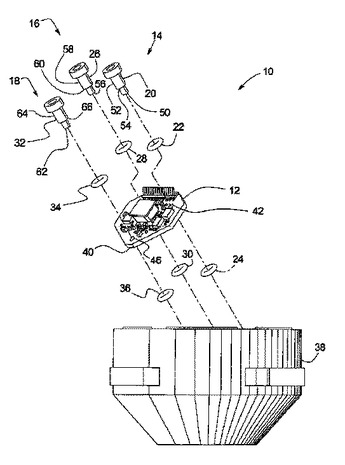
慣性センサアセンブリの弾性振動および衝撃絶縁
慣性センサシステムは、ベース、慣性センサ、および絶縁装置装着具を有する。絶縁装置装着具は、慣性センサをベースに固定し、絶縁装置装着具は、ボルトと、第1および第2振動吸収部材とを含む。ボルトは、慣性センサおよびベースを通して挿入され、第1振動吸収部材が、ボルトと慣性センサとの間にあり、第2振動吸収部材が、慣性センサとベースとの間にある。絶縁装置装着具が、ベースを通してホストシステムから伝播する振動、衝撃および/または音響雑音から慣性センサを絶縁する。
 (もっと読む)
(もっと読む)
121 - 137 / 137
[ Back to top ]