
Fターム[2F129BB24]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 相対位置測位 (18,278) | 角速度センサ (5,830) | ロール (137)
Fターム[2F129BB24]に分類される特許
41 - 60 / 137
ハイブリッド車両の駆動制御装置
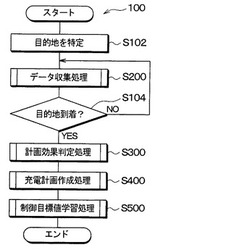
【課題】ハイブリッド車両における燃費の向上を図る。
【解決手段】制御目標値を規定するための第1の情報(車速、道路勾配)と、制御目標値のスケジュールを規定して駆動制御を行うことにより一定の燃費向上効果が得られると推定される計画有効区間を抽出するための第2の情報(区間長、道路勾配等)を一定距離毎に収集し(S200)、第2の情報に基づいて出発地から目標とする地点に到達するまでの区間から計画有効区間を抽出し(S400)、第1の情報を用いて計画有効区間について低燃費となるような制御指標のスケジュールを規定し(S500)、駆動制御を行う。
(もっと読む)
軌道ベースのロケーション決定

ここで開示する主題事項は、移動体デバイスの動きの推定された軌道を使用して、特に、推定された軌道と、1つ以上の予め定められた候補の軌道との比較を使用して、移動体デバイスのロケーションを決定することに関する。 (もっと読む)
位置検出装置
【課題】車速パルス信号を用いずに、移動体の現在位置を精度良く検出できる位置検出装置を提供する。
【解決手段】本発明に係る位置検出装置は、ロール角算出部19は右側方向加速度センサ11とヨー方向角速度センサ16の出力信号に基づいてロール角を算出し、姿勢角算出処理部13は、ピッチ方向角速度センサ15、ヨー方向角速度センサ16、ロール角算出部19の出力信号に基づいて移動体の姿勢角を算出する。進行方向加速度センサ10は移動体の進行方向の加速度を検出し、走行距離算出部12は加速度センサ10において検出された加速度と、姿勢角算出処理部13において算出された移動体の姿勢角に基づいて移動体の走行距離を算出する。位置算出部14は姿勢角算出処理部13において算出された移動体の姿勢角と、走行距離算出部12において算出された移動体の走行距離に基づいて移動体の現在位置を算出する。
(もっと読む)
コンピュータ支援による船舶操縦方法
【課題】信頼できる船舶操縦方法を提供すること。
【解決手段】接岸時の操船において、船舶の位置と動きが、移動または静止している障害物または障害輪郭とともに、自動的に冗長手段によって把握され、コンピュータによって画像表示が制御されることにより、前記画像表示上において前記障害物または前記障害輪郭に対する前記船舶の実際の位置が、実行されているまたは推奨されている操縦操作とともに表示されることとする。
(もっと読む)
信号チャネル間の相対的な処理遅延を補償することによる慣性センサ・データの正確な獲得のための方法および装置
本明細書において開示される主題は、複数の座標軸に関係してモバイルデバイスの物理的移動を検出することに適合した複数のセンサによって生成される複数の信号を受信するためのシステムおよび方法に関係する。受信された信号のうちの少なくとも1つがデジタル化される時間は、遅延され、共通の時点に関係して同期される受信された複数の信号のデジタル化されたバージョンの出力を提供する。 (もっと読む)
携帯端末及びその管理システム及び携帯端末の位置データの補正方法、及び補正プログラム
【課題】相対位置データで補正された現在位置データに含まれる累積誤差による精度低下を防止し、携帯端末における現在位置データの精度低下に伴う不都合の発生を防止することができる携帯端末及び管理システムを提供する。
【解決手段】音を取得する集音手段1−3bと、携帯端末1Aの絶対位置を検出する絶対位置検出手段1−1と、携帯端末の相対位置を検出する相対位置検出手段1−2と、集音手段1−3bで取得した音を音声と認識する音声認識手段1−3と、相対位置検出手段1−2で検出した相対位置データで補完された現在位置データを補正する現在位置データ補正手段1−6と、を備えたことを特徴とする。
(もっと読む)
ナビゲーション装置及び電気自動車のナビゲーション方法
【課題】駆動用モータの温度上昇をより確実に抑制するように経路を設定できるナビゲーション装置を提供する。
【解決手段】ナビゲーション装置11の情報処理装置12は、探索した目的地までの経路に従って電気自動車1が走行する場合について駆動用モータ3の温度変化を推定し、駆動用モータ3の温度が当該モータ3の性能が劣化するレベルまで上昇しないように経路を変更する。具体的には、各リンクについて設定されるリンクコストとリンクコスト係数とに基づきリンクコストの積算値を計算し、そのリンクコストの積算値を最小にする経路を探索する。また、各リンクについて設定した温度コストと温度コスト係数とに基づいて温度コストの積算値も計算し、その温度コストが駆動用モータ3の性能が劣化する温度に対応して設定される性能劣化閾値を超えないように経路を変更する。
(もっと読む)
GPSによって支援されたスタンド予約の電気乗り物
電気走行駆動装置と、少なくとも1つの再充電可能かつ交換可能な電気エネルギーユニットと、を備える乗り物であって、電気エネルギーユニットから電気走行駆動装置に電気駆動エネルギーが供給され、かつ電気エネルギーユニットが低い充電状況で充電または交換される乗り物を駆動するための方法。 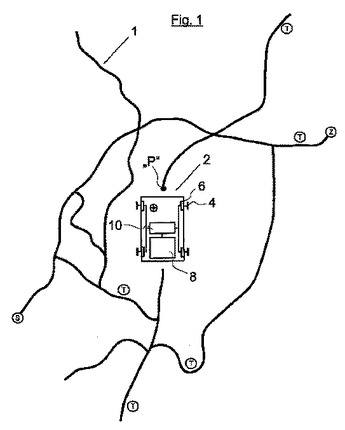 (もっと読む)
(もっと読む)
推測航法における高度成分の調整
ここに開示される主題は、センサーによる推測航法に少なくとも部分的に基づいて推定所在の高度成分を調整することに関する。 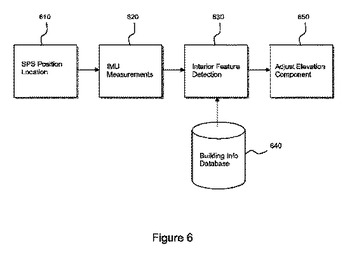 (もっと読む)
(もっと読む)
地理的軌道の軌跡を割り出すための方法
【課題】軌道の地理的データを割り出すための方法であって、軌道に沿って移動するデータ収集装置から得られるデータの精度を高めることができる方法を提供する。
【解決手段】軌道に関するデータを測定するためのデータ収集装置に一組の車載センサが備えられ、当該装置の移動の間に物理的測定データをサンプル様式で収集することを可能にし、収集した測定データから方位プロファイル、ピッチ・プロファイル、距離プロファイルおよびロール・プロファイルを割り出すことができるようにする。当該装置が軌道の出発位置から終点位置まで移動する間、測定データが、後の評価のために、メモリに記憶される。プロファイルを割り出し、それらプロファイルから軌跡を割り出すべく収集した測定データを評価する前に、少なくとも当該装置の第1および第2のセンサの測定データに対して誤差補償が適用される。
(もっと読む)
車載用表示システム及び表示方法
【課題】車両の姿勢及び方位と背景との傾きの差による違和感を低減した車載用表示システム及び表示方法を提供する。
【解決手段】表示オブジェクトを有する映像を含む光束を観視者の片目に向けて投影する映像投影部と、前記観視者が搭乗する車両の姿勢及び方位の少なくともいずれかの角度に関する車両角度情報、及び、前記車両の外界の背景における前記表示オブジェクトのターゲットの位置での背景物の角度に関する外界角度情報の少なくともいずれかを取得する角度情報取得部と、を備え、前記映像投影部は、前記角度情報取得部によって取得された前記車両角度情報及び前記外界角度情報の少なくともいずれかに基づいて、前記表示オブジェクトの前記映像内における角度を変化させることを特徴とする車載用表示システムを提供する。
(もっと読む)
位置算出方法及び位置算出装置
【課題】位置算出の正確性とセンサー部の消費電力とのバランスを考慮した適切な位置算出を実現すること。
【解決手段】移動体に保持或いは搭載される携帯型電話機1において、ホストCPU40は、移動体の移動状態を検出するセンサー部90を所定の間欠動作周期で間欠的に動作させるが、この間欠動作周期をGPS衛星信号の受信状況に基づいて可変に制御する。そして、間欠動作周期で動作したセンサー部90の検出結果を用いて所定の慣性航法演算を行って慣性航法演算位置を算出し、GPS算出位置と慣性航法演算位置とを合成して出力位置を決定する。
(もっと読む)
カーナビゲーション装置
【課題】二酸化炭素排出量の少ない推奨ルートを容易に割出し報知することができるようにする。
【解決手段】カーナビゲーション装置1は、マイコンを主体として構成された制御装置2、車両の現在位置を検出するための位置検出器3、地図データ提供部4、操作部5、外部情報受信部6、カラー液晶ディスプレイ等からなる表示装置7、音声出力装置8を備えて構成されている。制御装置2は、設定された目的地に対して複数ルートを探索し、ルート探索された各ルートに対して、ルート内の道路種別ごとに、距離を算出し、前記各ルート内の道路種別ごとに、走行状況における各種二酸化炭素排出量影響要因に対してパラメータを設定し、前記各ルート内の道路種別ごとの前記距離と、当該道路種別ごとの前記パラメータとに基づいて二酸化炭素排出量目安を算出し、前記各ルートにおける二酸化炭素排出量目安結果の相対結果を表示装置7及び音声出力装置8により報知させる。
(もっと読む)
位置算出方法及び位置算出装置
【課題】カルマンフィルタ処理を用いた位置算出の正確性を向上させること。
【解決手段】GPS衛星からのGPS衛星信号に基づいて、最小二乗法を用いた位置算出処理を行って移動体の位置を算出する。そして、加速度センサ71、ジャイロセンサ73及び方位センサ75を含むセンサ部70の検出結果に基づいて移動体の移動状態を判定し、判定した移動状態に応じて、カルマンフィルタを用いた位置算出処理で用いられる誤差パラメータ(観測誤差共分散行列「R」)及び時変パラメータ(システムノイズ行列「Q」)の値を変更する。そして、算出した位置を、カルマンフィルタ位置算出処理を行って補正する。
(もっと読む)
位置算出方法及び位置算出装置
【課題】カルマンフィルタ処理を用いた位置算出の正確性を向上させること。
【解決手段】携帯型電話機1を保持又は搭載した移動体の移動可能性、不定及び停止可能性それぞれについて、センサ部70の加速度センサ71の検出値適合範囲を設定するとともに、移動可能性の検出値適合範囲を最も広く設定することで、移動体の停止判定用のメンバシップ関数を設定する。そして、メンバシップ関数を用いたファジィ推定演算により移動体が停止状態にあるか否かを判定し、カルマンフィルタを用いた位置算出演算を行う際の誤差パラメータである観測誤差共分散行列「R」及びシステムノイズ行列「Q」の値を、停止状態にあると判定したか否かに応じて変更する。そして、最小二乗法を用いた位置算出処理により算出した移動体の位置を、カルマンフィルタを用いた位置算出処理により補正することで、出力位置を決定する。
(もっと読む)
車載型ナビゲーション装置および車載型ナビゲーション装置の制御方法
【課題】レーンを考慮して短時間で目的地に到着できる経路を探索すること。
【解決手段】自車位置を特定する特定手段(CPU11)と、目的地の入力を受け付ける受付手段(タッチパネル式液晶ディスプレイ)と、記憶装置(HDD14)に記憶された道路情報を参照し、自車位置から目的地までの経路を探索する探索手段(CPU11)を有し、探索手段は、ノードに進入するリンクを進入リンクとし、ノードから脱出するリンクを脱出リンクとした場合に、進入リンクから脱出リンクへ通じるレーンの有無を考慮してコスト計算を実行する。
(もっと読む)
経路探索装置、経路探索方法、経路探索プログラムおよび記録媒体
【課題】位置情報の精度に応じた経路を探索すること。
【解決手段】まず、取得部103によって移動体の位置に関する位置関連情報を取得する。取得部103は、たとえば衛星から送信された測位情報や移動体の移動状態を検出するセンサの出力情報を位置関連情報として取得する。つぎに、算出部105によって、位置関連情報に基づいて、移動体の現在地点の位置情報を算出する。そして、判定部106によって、位置情報の精度を判定する。つぎに、探索部107によって、位置情報の精度に応じた経路を探索する。
(もっと読む)
案内情報出力装置、案内情報出力方法、案内情報出力プログラムおよび記録媒体
【課題】位置情報の精度に応じた範囲内に移動体が位置する場合に案内情報を出力すること。
【解決手段】まず、取得部103によって移動体の位置に関する位置関連情報を取得する。つぎに、算出部105によって、位置関連情報に基づいて、移動体の現在地点の位置情報を算出する。そして、判定部106によって、位置情報の精度を判定する。つぎに、判断部107によって、移動体の現在地点が案内地点から位置情報の精度に応じた範囲内に位置すると判断された場合、制御部108によって該範囲に対応する案内地点に関する案内情報を出力部102に出力する。
(もっと読む)
航法装置及び推定方法
【課題】航法装置の推定の精度を劣化させることなく、計算量を少なくする。
【解決手段】姿勢角外挿計算部122は、角速度センサ111が計測した移動体座標系における移動体800の角速度ωbに基づいて、慣性座標系における移動体800の姿勢角qnを計算する。速度増分計算部126は、加速度センサ112が計測した移動体座標系における移動体800に加わる加速度abと姿勢角qnとに基づいて、慣性座標系における移動体800の速度の増分Δvnを計算する。速度外挿計算部127は、速度の増分Δvnに基づいて、慣性座標系における移動体800の速度vnを計算する。速度減算部130は、速度vnと、GPS受信機113が計測した慣性座標系における移動体800の速度vgとの差dvを計算する。第一推定部140は、姿勢角qnと、速度の増分Δvnと、速度の差dvとに基づいて、角速度の誤差bgと、姿勢角の誤差εとを推定する。
(もっと読む)
センサドリフト量推定装置
【課題】車両運動の状態に関わらず、安定してセンサのドリフト量を推定することができるようにする。
【解決手段】姿勢角オブザーバ24によって、各センサの検出値に応じたセンサ信号に基づいて、車体の鉛直軸に対する姿勢角の微分量を算出する。運動方程式微分量算出手段26によって、センサ信号及び姿勢角オブザーバ24によって推定された姿勢角に基づいて、車両運動の運動方程式より得られる姿勢角の微分量を算出する。ドリフト量推定手段28によって、センサ信号のセンサドリフト量を考慮したときに、姿勢角オブザーバ24により算出された姿勢角の微分量と、運動方程式微分量算出手段26により算出された姿勢角の微分量にセンサドリフト量を考慮した値とが等しくなる関係を用いて、各センサ信号のセンサドリフト量を推定する。ドリフト量補正手段22によって、推定されたセンサドリフト量に基づいて、各センサ信号を補正する。
(もっと読む)
41 - 60 / 137
[ Back to top ]