
Fターム[2F129BB37]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正対象 (3,438) | 方位センサ (111)
Fターム[2F129BB37]に分類される特許
101 - 111 / 111
自車情報認識装置及び自車情報認識方法
【課題】 演算処理負荷が少なく正確性が高い画像認識処理を用いて、自車位置及び自車方位の一方又は双方を高精度に認識することが可能な自車情報認識装置を提供する。
【解決手段】 自車両に搭載された撮像装置2により撮像した画像情報Gを取り込む画像情報取得手段10と、自車位置情報D3を取得する自車位置情報取得手段7と、地物の位置及び高さの情報を含む地物情報D1を格納する地物情報格納手段3と、年月日及び時刻の情報並びに地物情報D1を用いて地物の影の位置及び形状を演算する地物影演算手段18と、画像情報Gに含まれる地物の影の画像g1を認識する影画像認識手段11と、同一地物に対する地物影演算手段18による演算結果と影画像認識手段11による認識結果とに基づいて自車位置及び自車方位の一方又は双方の認識を行う自車情報認識手段21と、を備える。
(もっと読む)
携帯端末装置、携帯端末システム、キャリブレーション方法

【課題】 方位センサのキャリブレーションを正確に行うことができる、携帯端末装置および携帯端末システムを提供する。
【解決手段】 方位センサを有する携帯端末装置1は車内に設置したホルダ3に固定し、カーナビゲーション装置2と通信ケーブル4で接続する。携帯端末装置1はカーナビゲーション装置2で検出した方位情報を受信し、受信した方位情報が90度以上になった時点で方位センサのキャリブレーションを開始する。また、キャリブレーションでは、携帯端末装置1の方位センサで検出した磁場データだけでなく、カーナビゲーション装置2から受信した信頼性の高い方位情報も使用する。
(もっと読む)
携帯情報端末および地磁気センサの補正用プログラム
【課題】 本体を回転させることなく、搭載される地磁気センサのオフセットの補正を行うことができる携帯情報端末および携帯情報端末の制御装置に組み込まれる地磁気センサの補正用プログラムを提供する。
【解決手段】 図(a)に示すように、表示部18aにおいて、現在地の景観に対して傾斜して地図MAPaが表示されている携帯電話機MPがユーザに携帯され、左回転の指示の機能が割り当てられているカーソルキー9aが押下され、地図MAPaが左に回転する。その後、地図MAPaが、図(b)に示す地図MAPbのように、現在地の景観と一致して表示されるようになる。そして、地図と現在地の景観とが一致したことがユーザに確認されると、カーソルキー9aが開放され、確認ボタン10が押下され、地図が回転した量がオフセット値として採用される。
(もっと読む)
ナビゲーション装置
【課題】 ドライバ毎に設定を切り替えるナビゲーション装置において、ナビゲーション装置がドライバを特定するための手続きを簡略化する。
【解決手段】 車両用ナビゲーション装置が、ハンズフリー機能付き携帯電話とBluetoothによるハンズフリー機能のための無線接続が確立したとき(ステップ215、220)、接続対象の携帯電話機が携帯電話機−設定対応データに登録済みのものであれば(ステップ225)、携帯電話機−設定対応データにおいて当該携帯電話機の識別データに対応するユーザ名称と実際のドライバが合致しているか否かを音声対話でユーザに確認し(ステップ230、235)合致していれば、携帯電話機−設定対応データにおいてその携帯電話機に対応する個別設定データに従って、ハンズフリー機能のために接続した携帯電話機に対応する個別設定を実現する。
(もっと読む)
ナビゲーション装置、ナビゲーション方法、およびナビゲーションプログラム
【課題】運転中に適切な休憩案内をおこなうこと。
【解決手段】車両を連続して運転している時間または距離に関する情報(以下「連続運転情報」という)を取得する連続運転情報取得部101と、車両の現在位置にかかる渋滞状況に関する情報(以下「渋滞情報」という)を取得する渋滞情報取得部102と、連続運転情報取得部101によって取得された連続運転情報と、渋滞情報取得部102によって取得された渋滞情報と、に基づいて、休憩案内に関する報知をおこなう報知部107と、を備えたことを特徴とする。
(もっと読む)
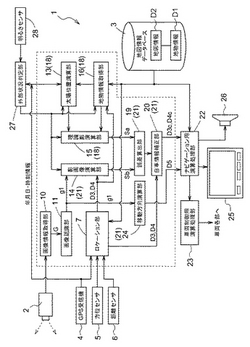
航法装置、航法システム、航法測位方法、および車両
【課題】 搬送波差分型全地球測位システム(GPS)受信機とレーザスキャナを有する自律陸上用車両(AGV)のための水平航法システムを提供する。高精度の車両航法システムは先進AGVに強く求められている。高性能のRTK−GPS受信機によっても高い測位精度は得られるが、高い建物やその他の障害物により遮蔽された環境下では、その性能は著しく低下する。
【解決手段】 本発明の航法システムによれば、こうした苛酷な環境下であっても、正確なGPS測位に必要なデシメートルレベルの測位精度が得られる。水平航法システムは低価格の光ファイバージャイロ(FOG)と精密なオドメータから成る。航法誤差は密結合の拡張カルマンフィルタ(EKF)を使用して推定する。EKFの測定値としては二周波数GPS受信機からの二重差分型符号と搬送波位相及びレーザスキャナ測定から生じる相対位置がある。
(もっと読む)
車両の相対方位検出装置
【課題】 ジャイロセンサを利用することなく、かつ、精度良く、車両の相対方位を検出することができる車両の相対方位検出装置を提供する。
【解決手段】 この相対方位検出装置は、車両のハンドル操作に基づいて車両の相対方位を検出するものであって、操舵角度検出手段50によりハンドルの操舵角度を検出し、絶対方位検出手段20によって車両の絶対方位を検出し、検出された操舵角度と絶対方位とに基づいて単位操舵角度あたりの方位変化量を係数として算出し、ハンドル操作時に操舵角度と予め求められている当該係数とに基づいて車両の相対方位を算出する。
(もっと読む)
地理的軌道の軌跡を割り出すための方法
所定の出発位置と所定の終点位置とを有する地理的軌道の軌跡を割り出すための方法は、装置の移動の間に物理的測定データをサンプルとして収集する車載同期センサ一式を備えているデータ収集装置を、前記出発位置から前記終点位置まで移動させるステップと、収集した測定データにもとづき、方位プロファイル、ピッチ・プロファイル、距離プロファイルおよびロール・プロファイルを割り出すステップと、前記方位プロファイル、前記ピッチ・プロファイル、前記距離プロファイルおよび前記ロール・プロファイルにもとづいて前記軌跡を割り出すステップとを有している。出発位置から終点位置までの装置の移動の間、前記物理的測定データのすべてが記憶される。記憶された測定データの取り出し後でかつ前記プロファイルの割り出しの前に、この方法は、前記一式のうちの第1および第2のセンサの測定データにそれぞれもとづいて、第1および第2の軌道パラメータをそれぞれ割り出し、第1の軌道パラメータを第2のパラメータにマッピングするステップと、該マッピングにもとづいて、第1および第2のセンサの測定データの誤差補償を決定するステップと、誤差補償によって第1および第2のセンサの測定データを補正するステップをさらに有している。 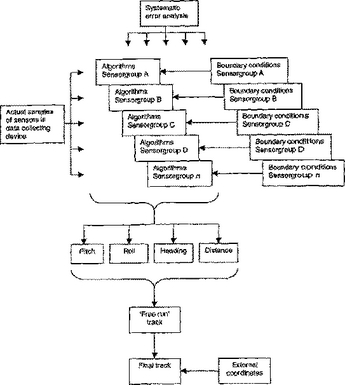 (もっと読む)
(もっと読む)
相互補完ナビゲーションシステム
【課題】移動体における相互補完ナビゲーションシステムを提供する。
【解決手段】ネットワークコンポーネントは、第1と第2のナビゲーションコンポーネントの間の函数関係を決定。函数関係は、第1のナビゲーションコンポーネントによって第2のナビゲーションコンポーネントのためのナビゲーションソリューションを記述。ヘルスモニタは、第2のナビゲーションコンポーネントのためのヘルスインジケータを決定。第2のナビゲーションコンポーネントは、ヘルスインジケータが健全なことを示すとき、第2のナビゲーションパラメータに対するナビゲーションソリューションを決定。ネットワークコンポーネントは、ヘルスインジケータが健全でないことを示すとき、第1ナビゲーションコンポーネントによって第2のナビゲーションコンポーネントの動きを記述する函数関係に基づいて第2のナビゲーションパラメータに対するナビゲーションソリューションを決定。
(もっと読む)
距離算出装置および算出プログラム
移動物体と対象物との間の方位角や、速度、ヨーレートなどの各種の状態量に基づいて、移動物体と対象物との間の距離を正確に算出することを目的とする。算出装置1は、移動物体と対象物との間の方位角を算出する手段2と、2つの時点間の移動物体の移動距離を算出する手段3と、移動方向の角度変化量を算出する手段4と、手段2、手段3、手段4の出力を用いて移動物体から対象物までの直線距離を算出する手段5とを備える。 (もっと読む)
ナビゲーション装置
誤差数cmの範囲で移動体の現在位置を示すことができるナビゲーションシステムを提供する。 ナビゲーション装置100は、車両等の移動体に備えられたカメラにより得られる現実の映像に基づき、当該移動体から観察される範囲における映像的な特徴点の三次元座標を含む所定の三次元情報を予め生成する特徴点三次元地図生成装置110と、その所定の三次元情報を記録した記録媒体120と、移動体に備えられたカメラにより得られる現実の映像を、記録媒体120に記録された所定の三次元情報と比較し、現実の映像と一致する三次元座標上の地点と方向を求め、移動体に備えられたカメラの三次元座標上の位置,速度,加速度,視点方向,3軸回転姿勢,3軸回転速度,3軸回転加速度等の所定項目を出力,表示する地点検索ナビゲーション装置130とを備えている。 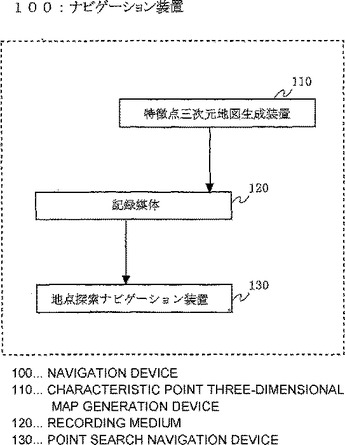 (もっと読む)
(もっと読む)
101 - 111 / 111
[ Back to top ]