
Fターム[2F129BB37]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正対象 (3,438) | 方位センサ (111)
Fターム[2F129BB37]に分類される特許
81 - 100 / 111
デッドレコニング装置
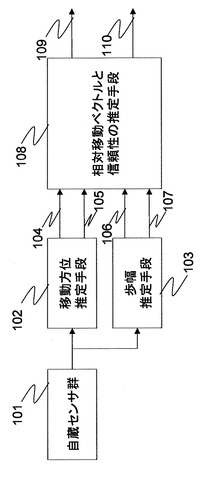
【課題】歩行者に装着されたセンサシステムによって人の歩行動作を計測、解析し、その移動方位と歩幅を装着型計算機システムが推定することにより、その歩行者に対して道案内などのアプリケーションを提供するために利用するデッドレコニング装置を提供する。
【解決手段】歩行動作に基づいて基準位置からの相対移動ベクトルを出力するデッドレコニング装置において、歩行動作を計測、解析して一歩ごとに歩行動作の移動方位と歩幅を推定して出力する手段と、前記出力された移動方位と前記出力された歩幅の信頼性を算定して出力する手段と、前記出力された移動方位と前記出力された歩幅に基づいて基準位置からの相対移動ベクトルを推定して出力する手段と、前記出力された移動方位と前記出力された歩幅、前記出力された移動方位の信頼性、前記出力された歩幅の信頼性に基づいて、前記出力された相対移動ベクトルの信頼性を算定して出力する手段を備える。
(もっと読む)
車載用ナビゲーション装置

【課題】旋回走行を要する自走式の駐車場における旋回走行によって、自車方位および自車位置の誤差が発生したとしても、これらの誤差を迅速かつ適切に補正することができ、自車方位精度および自車位置精度を向上させることができる「車載用ナビゲーション装置」を提供すること。
【解決手段】自車位置・方位補正手段29,38により、駐車場における自車両の旋回走行の中心点を回転中心とした回転処理手段37による回転後の所定範囲の走行軌跡を用いて、自車方位の補正および自車位置の補正を行うこと。
(もっと読む)
自車位置/方位修正装置及びその方法
【課題】GPS信号を受信できないか又は受信が困難な場所であっても、自車の位置及び方位を修正することのできる「自車位置/方位修正装置及びその方法」を提供する。
【解決手段】自車位置/方位修正装置は、記憶手段と、自車位置及び方位を検出する自車位置検出手段と、直線走行路を検出する直線路検出手段と、前記自車位置及び方位を修正する位置方位修正手段と、前記記憶手段、自車位置検出手段、直線路検出手段及び位置方位修正手段に動作可能に接続された制御手段とを有する。前記制御手段は、自車が屋内駐車場(43)に進入したと判定した後、前記直線路検出手段によって最初に直線走行路であると判定された走行路(45)を基準直線路として前記記憶手段に格納し、さらに前記直線路検出手段によって検出された直線走行路(48)を走行する自車の位置(48a)及び方位(θ2)を前記基準直線路を基に前記位置方位修正手段に修正させる。
(もっと読む)
測位装置及び測位方法
【課題】電波航法により絶対位置、絶対速度を得ることができない場合、或いは、電波航法による測位精度が低い場合でも、自律航法における測定誤差を的確に推測する。
【解決手段】電波を受信している衛星の数や配置等に基づいて、電波航法で得られる絶対測位情報が高信頼度であるかを判定し(ステップS2)、高信頼度であるときには、電波航法による絶対測位情報を利用して、自律航法による測位結果の測定誤差を推定する(ステップS4)。電波航法による絶対測位情報が高信頼度でない場合は、捕捉衛星の中から受信パワーや仰角がしきい値よりも大きい高信頼度衛星を選択し(ステップS5)、この高信頼度衛星との間の擬似距離及びドップラ周波数を算出しこれを利用して、自律航法による測位結果の測定誤差を推定する(ステップS6)。そして推定した測定誤差を用いて自律航法による測位結果を補正し、測位装置10本体の測定位置を得る。
(もっと読む)
位置算出装置の誤差円の決定方法
【課題】 GPS位置の測位誤差を表す誤差円を測位環境に応じて再決定する「位置算出装置の誤差円の決定方法」を提供する。
【解決手段】 誤差円の決定方法は、GPSにより測位された一定期間Tcの走行距離Dpと自立航法センサにより測位された前記一定期間Tcに対応する走行距離Dqとの比率を表す走行距離比率に基づきGPS測位によるGPS位置の誤差円Rを決定するステップと、自立航法センサにより測位された航法位置がGPS位置の誤差円Rに含まれないと判定されたとき、走行距離Dpと走行距離Dqを算出するための前記一定期間Tcを予め決められた期間Tsだけ延長させ誤差円Rを再決定するステップとを有する。
(もっと読む)
位置算出装置の進行角決定方法
【課題】 信頼度の高い方位データを用いて、移動体の進行角を決定することができる「位置検出装置の進行角決定方法」を提供する。
【解決手段】 本発明の進行角決定方法は、GPS衛星により測位されたGPS方位および自立航法センサにより測位された航法方位を入力するステップと、入力されたGPS方位の信頼度と航法測位の信頼度を比較し、信頼度が高いと判定された方位データに基づき進行角を算出するステップとを有する。これにより、進行角の誤差が軽減され、位置精度が向上する。
(もっと読む)
たて抗掘削機用方位検出装置及びそれを用いたたて抗掘削時の方位検出方法
【課題】本発明は、地球の自転角速度・重力を利用し、前記ドリルの旋回により生じる方位角誤差を除去し、抗掘削の方位精度を向上させることを目的とする。
【解決手段】本発明によるたて抗掘削機用方位検出装置及びそれを用いたたて抗掘削時の方位検出方法は、方位検出部(20)が検出する地球の自転角速度・重力を利用し、ドリル(2)の旋回により生じる方位角誤差を除去する構成と方法である。
(もっと読む)
方位センサの補正係数演算装置及び演算プログラム
【課題】GPS情報を基準とし、方位センサからの方位センサ情報に基づく方位変化量及びGPS情報に基づく方位変化量に関する情報の取得を適切に行い、前記方位センサ情報を補正するための補正係数を適切に演算することが可能な方位センサの補正係数演算装置等を提供する。
【解決手段】近傍領域arA内と後方領域arB内の双方で直進し、近傍領域arAと後方領域arBとの間で方位変更があった場合に、近傍領域arA内での進行方位と後方領域arB内での進行方位との間のGPS情報に基づくGPS方位変化量ang−GPSと、方位センサ情報に基づくセンサ方位変化量ang−SENとの差異に基づいて、方位センサ情報を補正するための補正係数を演算する。
(もっと読む)
方位センサの補正係数演算装置及び演算プログラム
【課題】方位変更の前後におけるGPS情報と方位センサ情報とに基づいて、方位センサ情報を補正するための補正係数を演算する場合において、方位センサの静的な設置角度及びその設置角度の動的な変化を考慮した動的補正係数を適切に演算することが可能な方位センサの補正係数演算装置等を提供する。
【解決手段】方位変更の前後におけるGPS方位変化量とセンサ方位変化量との差異に基づいて、方位センサ情報の基本補正係数を演算し、方位センサ4の検出軸Xの静的な設置角度αに応じて基本補正係数を補正した静的補正係数を演算し、方位センサ4の検出軸X方向の動的変化角度βに応じて、静的補正係数を動的に補正して動的補正係数を演算する。
(もっと読む)
周辺施設検索装置
【課題】ユーザが施設の行き易さを容易に把握することができる周辺施設検索装置を得ることを目的とする。
【解決手段】進行方向検出部5により検出された進行方向を含む一定の角度範囲内に存在する施設の中で、現在位置検出部4により検出された現在位置から最も近い位置に存在する施設を起点にして、一定幅の施設検索エリアPを渦巻状に設定し、施設検索処理部10により検索された施設を施設検索エリアP内に配置する施設配置処理部11を設け、その施設配置処理部11により施設検索エリアP内に配置された施設のうち、渦巻きの内側に存在する施設ほど、推奨順位が高い施設として提示する。
(もっと読む)
方位測定装置および方位測定システム
【課題】迅速に磁気センサの残留磁気値を取得することができ、正確に船首方向の方位を測定することが可能な方位測定装置および方位測定システムを提供する。
【解決手段】磁気センサコンパス3は、3軸磁気センサ38が検出した検出磁気値から残留磁気値を減算した検出磁気真値に基づいて船首方位ψmを算出する。残留磁気値は、3軸磁気センサ38が検出した検出磁気値と、地磁気データ記憶部22が記憶する地磁気データに基づいて取得された標準の地磁気の値とに基づいて算出される。衛星測位コンパス2は、衛星受信部34aおよび34bが受信した信号に基づいて船首方位ψsを算出する。選択部10は、衛星受信部34aの受信状況が良好であるときは、船首方位ψsを船首方位ψとして船首方位表示部12へ入力し、衛星受信部34aの受信状況が良好でないときは、船首方位ψmを船首方位ψとして船首方位表示部12へ入力する。
(もっと読む)
ナビゲーション装置及び方位算出方法
【課題】磁気センサの周囲の磁性体の影響により、磁気センサを用いた走行方位の検出の精度が悪化することを防ぎ、GPS信号を受信できない場合であっても、磁気センサを用いて走行方位の検出を行うことにより、走行位置を正確に特定することができるナビゲーション装置を提供する。また、磁気センサの出力値から精度よく走行方位を算出する方位算出方法を提供する。
【解決手段】GPS信号を受信可能である場合は、GPSの位置情報及びジャイロセンサの出力値から走行方位を算出する。GPS信号を受信不可能である場合は、磁気センサの出力値から方位算出テーブルを参照して走行方位を算出する。GPSの位置情報及びジャイロセンサの出力値から走行方位を算出した場合には、算出した走行方位及び磁気センサの出力値を磁気センサの算出テーブルの更新用データとして記録する。データが所定数蓄積された場合には、算出テーブルの更新を行う。
(もっと読む)
ナビゲーション装置
【課題】0点電圧の検出精度を向上させて車両の現在位置を正確に推定させることを可能とし、しかも特別な機構の追加を要さず、簡易に実現可能なナビゲーション装置を提供する。
【解決手段】車両の後退時にバックギアチェンジを検出する車両後退検出手段と、車速パルスから車両の走行状態を検出する走行検出手段と、車両の方位を検出する方位検出手段と、車両の現在時位置を推定する自車位置推定手段とを備え、前記車両後退検出手段でバックギアが入っていないことを検出し、かつ、前記走行検出手段で一定時間車速パルスが発生しないことを検知した場合に、前記方位検出手段の出力を基準値として記憶するように構成されている。
(もっと読む)
方位及び傾斜角検出装置、方位及び傾斜角検出方法、プログラム及び携帯端末装置
【課題】地磁気成分や重力成分を検出して方位及び傾斜角の情報を検出するにあたって、重力成分に含まれる誤差の影響を抑える。
【解決手段】測定データ取り込み手段702は加速度センサや磁気センサから測定データg,hを取り込む。第1の演算手段703は測定データg,hから方位角α0や仰角β0、地磁気伏角θ0を算出する。平均化手段704は地磁気伏角θ0を蓄積し平均値をとって地磁気伏角θとする。第2の演算手段705は測定データhと地磁気伏角θとから方位角αや仰角βを算出する。複数の解が存在する場合、それぞれの解を候補値(α1,β1)(α2,β2)とする。選択手段706は上記の値α0,β0を参考値とし、候補値(α1,β1)(α2,β2)から検出値(α,β)を選択する。
(もっと読む)
カーナビゲーション装置
【課題】 動作が停止された後に移動されても起動時に正常なナビゲーションを開始できるカーナビゲーション装置を提供する。
【解決手段】 現在の位置を検出する位置検出手段1と、現在向いている方向を検出する方向検出手段2と、位置および方向の少なくとも1つを変更する地点を、変更地点として登録する変更地点登録手段3と、起動時に位置検出手段で検出された位置が変更地点登録手段によって登録された変更地点から所定範囲内にあるかどうかを判断する変更地点判断手段4と、変更地点判断手段によって所定範囲内にあると判断された場合に、位置検出手段で検出された位置を示す値および方向検出手段で検出された方向を示す値の少なくとも1つを、位置および方向の各々に対してあらかじめ定められた変更値に変更する位置・方向変更手段6とを備えている。
(もっと読む)
ナビゲーション装置
【課題】より精度よく現在位置を求める技術を提供する。
【解決手段】ナビゲーション装置は、信号機のある交差点における車両の動作を利用して現在位置を求める。具体的には、ナビゲーション装置は、車両の信号待ち(信号機のある交差点付近での車両の停車)を検出した後、車両の旋回を検出した場合、その交差点において交差する道路であって旋回終了時の車両方位に一致する道路上に現在位置を求め直す。
(もっと読む)
ナビゲーション装置
【課題】旋回動作の多い駐車場内でも、精度よく車両方位を求めるナビゲーション装置を提供する。
【解決手段】ナビゲーション装置は、駐車場内の誘導路や駐車スペースが、一般的に、隣接する道路方位αに対して同じ向きか、又はα+90°、α+180°若しくはα+270°であることを利用して車両方位を修正する。具体的には、ナビゲーション装置は、方位の変位を積算して車両方位を求める車両方位算出手段と、現在位置が駐車場内に在るか否かを判定する手段と、現在位置が駐車場内に在ると判定された場合、当該駐車場に入る前に現在位置が存在した道路の方位α、α+90°、α+180°及びα+270°のうち車両方位算出手段で算出した車両方位に最も近い方位に当該車両方位を修正する手段とを備えている。
(もっと読む)
船舶用自動航法援助システム
【課題】潮流の有無に関わらず、船舶を予定航路に沿って正確に航行させることを可能とする船舶用自動航法援助システムを提供する。
【解決手段】命令半径演算部16は、予定航路データ記憶部12より入力された予定航路データと、GPS航法装置14より取得した対地速度・方位情報と、ジャイロ装置20より取得した対水方位及び船速測定器22より取得した対水速度(対水速度・方位情報)とから潮流速度・方位情報を算出し、オートパイロット装置18は、命令半径演算部16より入力された前記潮流速度・方位情報と、取得した前記対水速度・方位情報とに基づいて舵角量を算出し、算出した前記舵角量を舵器24に出力する。これにより、舵器24は、入力された前記舵角量に基づいて船舶を所定方位に旋回させ、この結果、該船舶を予定航路に沿って正確に航行させることができる。
(もっと読む)
磁気センサとレートセンサを用いた真方位角検出方法
【課題】本発明は、外乱による誤差及び観測雑音等の影響を除去した高精度の方位角推定値を得ることを目的とする。
【解決手段】本発明による磁気センサとレートセンサを用いた真方位角検出方法は、磁気センサ(1)からの方位角信号(2)とレートセンサ(4)の方位軸回りの角速度信号(5)をカルマンフィルタによる方位角推定部(3)に入力して演算処理することにより方位角推定値(6)を得る方法である。
(もっと読む)
自車情報認識装置及び自車情報認識方法
【課題】 演算処理負荷が少なく正確性が高い画像認識処理を用いて、自車位置及び自車方位の一方又は双方を高精度に認識することが可能な自車情報認識装置を提供する。
【解決手段】 自車両に搭載された撮像装置2により撮像した画像情報Gを取り込む画像情報取得手段10と、自車位置情報D3を取得する自車位置情報取得手段7と、地物の位置及び高さの情報を含む地物情報D1を格納する地物情報格納手段3と、年月日及び時刻の情報並びに地物情報D1を用いて地物の影の位置及び形状を演算する地物影演算手段18と、画像情報Gに含まれる地物の影の画像g1を認識する影画像認識手段11と、同一地物に対する地物影演算手段18による演算結果と影画像認識手段11による認識結果とに基づいて自車位置及び自車方位の一方又は双方の認識を行う自車情報認識手段21と、を備える。
(もっと読む)
81 - 100 / 111
[ Back to top ]