
Fターム[2F129BB37]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正対象 (3,438) | 方位センサ (111)
Fターム[2F129BB37]に分類される特許
41 - 60 / 111
方位センサの補正係数演算装置及び演算プログラム
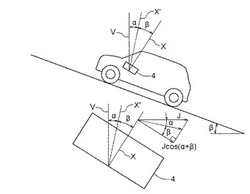
【課題】方位変更の前後におけるGPS情報と方位センサ情報とに基づいて、方位センサ情報を補正するための補正係数を演算する場合において、方位センサの静的な設置角度及びその設置角度の動的な変化を考慮した動的補正係数を適切に演算することが可能な方位センサの補正係数演算装置等を提供する。
【解決手段】方位変更の前後におけるGPS方位変化量とセンサ方位変化量との差異に基づいて、方位センサ情報の基本補正係数を演算し、方位センサ4の検出軸Xの静的な設置角度αに応じて基本補正係数を補正した静的補正係数を演算し、方位センサ4の検出軸X方向の動的変化角度βに応じて、静的補正係数を動的に補正して動的補正係数を演算する。
(もっと読む)
ナビゲーション装置

【課題】方位を変化させる施設に関する情報などを用いずに、方位を正しく算出する。
【解決手段】ナビゲーション装置1は、ナビゲーション処理等を行うメインシステム100と、車両の方位を算出するためのデータを算出するジャイロセンサモジュール200と、車両の振動を検知するショックセンサモジュール300を有する。また、ナビゲーション装置1は、メインシステム100およびジャイロセンサモジュール200に電源を供給する主電源制御スイッチ(主SW)420と、ジャイロセンサモジュール200に電源を供給する副電源制御スイッチ(副SW)430とを有する。ショックセンサモジュール300は、主電源制御スイッチ420がOFFの間に、車両の衝撃を検知すると、副電源制御スイッチ430をONにする。
(もっと読む)
地磁気センサを用いて歩行者の端末所持状態を判別する携帯端末、プログラム及び方法
【課題】端末姿勢の変動状態を判別することによって、端末姿勢が変動しない第1の進行方向決定技術と、端末姿勢が腕振りによって変動する第2の進行方向決定技術とを自動的に使い分けることができる携帯端末、プログラム及び方法を提供する。
【解決手段】携帯端末は、3軸の地磁気ベクトルを出力する地磁気センサを有し、当該携帯端末に対する地磁気ベクトルの向きの変動量を算出する変動量算出手段と、変動量が所定閾値以上である場合、当該携帯端末は姿勢不変動状態にあり、そうでない場合、当該携帯端末は姿勢変動状態にあると判別する姿勢状態判別手段とを有する。変動量算出手段は、地磁気ベクトルを正規化する正規化手段と、正規化された地磁気ベクトルから、地磁気ベクトル変動量Cを算出する地磁気ベクトル変動量算出手段と、その変動量Cにおける所定個数nの移動平均変動量Caを算出する移動平均変動量算出手段とを有する。
(もっと読む)
方位決定装置及び方法及びプログラム、位置算出装置及び方法及びプログラム、並びに、電子機器
【課題】GPS電波の受信状況が良好でない場合であっても、方位を高精度に決定することが可能な方位決定装置等を提供する。
【解決手段】GPS衛星からの電波を受信するGPSアンテナ11a、11bと、位置を算出するGPSユニット12a、12bと、地磁気に基づいて第1の方位を検出する電子コンパス13と、GPSユニット12a、12bによって算出された位置に基づいて第2の方位を算出し、第1の方位と第2の方位とを比較し、第1の方位と第2の方位とが一致する場合には、第1の方位及び/又は第2の方位を現在の方位として決定し、第1の方位と第2の方位とが不一致の場合には、第1の方位を現在の方位として決定するホストCPU14と、を含む。
(もっと読む)
方位追従表示装置、方位追従表示方法および方位追従表示プログラム
【課題】画面に表示された画像によって画面内において認識される方位と現実空間の方位とのずれを低減する方位追従表示装置を提供する。
【解決手段】方位追従表示装置は、画面に対して固定され画面が基準姿勢にあるとき、x軸が現実空間において左右方向に平行でありz軸が画面に対して垂直であるxyz直交座標空間の姿勢を表す正格直交行列である姿勢行列Aにもとづき、画面内において基準水平方位を認識させる画像であって、基準姿勢の画面に表示されると画面内において認識される基準水平方位が現実空間における基準水平方位に一致する画像が、任意の姿勢の画面に表示されるときに、画像から認識される基準水平方位が現実空間における基準水平方位に対して追従するように、画像を回転させる角度θを導出する表示制御手段を備える。
(もっと読む)
車載装置
【課題】ユーザに対し、排気ガスの排出を抑えた状態、または、エネルギーの消費を抑えた状態のうちの少なくともいずれか一方の状態での運転であるエコ運転が行われた度合いについての適切な判定結果を速やかに把握させることが可能な車載装置を提供する。
【解決手段】運転開始後1分周期で到来する判定タイミングにおいて、1分前から判定タイミングまでの期間の自車両の運転と、運転開始後から判定タイミングまでの期間(1トリップとも記載)の自車両の運転とについて、複数の異なる観点で、エコ運転が行われた度合いについての判定(エコ運転判定)を行う。そして、ナビゲーション装置は、これらのエコ運転判定の判定結果に基づき、1分間の運転と1トリップの運転について、エコ運転が行われた度合いについての総合的な判定結果であるエコ運転レベルをそれぞれ特定し、表示する(S250)。
(もっと読む)
加速度センサ及び地磁気センサを用いて歩行者の進行方向を決定する携帯端末、プログラム及び方法
【課題】歩行者が、携帯端末を手持ちで歩行している場合であっても、その携帯端末に搭載された地磁気センサのみを用いて、歩行者の進行方向をできる限り正確に決定する携帯端末、プログラム及び方法を提供する。
【解決手段】携帯端末の進行方向決定手段は、腕振り運動に基づく加速度面に対する法線ベクトルとなる歩行基準ベクトルを算出する歩行基準ベクトル算出手段と、加速度データ及び地磁気データから、重力ベクトルと、該重力ベクトルに対応する地磁気ベクトルとを導出し、重力ベクトル及び地磁気ベクトルの方位基準面に対する法線ベクトルとなる方位基準ベクトルを算出する方位基準ベクトル算出手段と、歩行基準ベクトル及び方位基準ベクトルに基づいて、進行方向の方位角を算出する方位角算出手段とを有する。
(もっと読む)
地磁気センサの異常判定装置、移動方位特定装置、コンピュータプログラム及び地磁気センサの異常判定方法
【課題】地磁気センサの異常を判定することができる地磁気センサの異常判定装置、地磁気センサが異常である場合でも安価に移動方位を特定することができる移動方位特定装置、コンピュータプログラム及び地磁気センサの異常判定方法を提供する。
【解決手段】地磁気センサ判定部14は、加速度センサ22で検出したデータにより装置の移動方向の変化に伴う加速度を算出し、算出した加速度及び距離センサ21で検出した移動距離に基づいて、装置の移動方位変化Δθaを算出する。また、地磁気センサ判定部14は、地磁気センサ23で検出したデータにより装置の移動方位変化Δθmを算出する。地磁気センサ判定部14は、算出した移動方位変化Δθm及び移動方位変化Δθaの差に応じて、地磁気センサ23の正常又は異常を判定する。
(もっと読む)
姿勢特定装置、移動方位特定装置、位置特定装置、コンピュータプログラム及び姿勢特定方法
【課題】歩行者が携帯した場合でも自身の姿勢を特定することができる姿勢特定装置、移動方位特定装置、位置特定装置、コンピュータプログラム及び姿勢特定方法を提供する。
【解決手段】座標変換部31は、装置直交3次元座標(X、Y、Z)と基準直交3次元座標(x、y、z)との間の座標変換を、ピッチ角α、ロール角β、ヨー角γをパラメータとして行う。角度算出部32は、座標変換部31での座標変換に3軸加速度センサ22及び3軸地磁気センサ23で検出したデータ(加速度、地磁気)を適用することにより、ピッチ角α、ロール角β、ヨー角γを算出する。姿勢特定部30は、基準となる基準直交3次元座標(x、y、z)に対するピッチ角α、ロール角β、ヨー角γを求めることにより、自身の姿勢を特定する。
(もっと読む)
姿勢特定装置、移動方位特定装置、位置特定装置、コンピュータプログラム及び姿勢特定方法
【課題】歩行者が携帯した場合でも自身の姿勢を特定することができる姿勢特定装置、移動方位特定装置、位置特定装置、コンピュータプログラム及び姿勢特定方法を提供する。
【解決手段】座標変換部31は、装置直交3次元座標(X、Y、Z)と基準直交3次元座標(x、y、z)との間の座標変換を、ピッチ角α、ロール角β、ヨー角γをパラメータとして行う。角度算出部32は、座標変換部31での座標変換に3軸加速度センサ22で検出したデータを適用することにより、ピッチ角α、ロール角β、ヨー角γを算出する。姿勢特定部30は、基準となる基準直交3次元座標(x、y、z)に対するピッチ角α、ロール角β、ヨー角γを求めることにより、自身の姿勢を特定する。
(もっと読む)
加速度センサを用いて歩行者の進行向きを決定する携帯端末、プログラム及び方法
【課題】歩行者が、携帯端末を手持ちで歩行している場合に、その携帯端末の加速度センサを用いて歩行者の進行向きを決定する携帯端末等を提供する。
【解決手段】加速度データを、歩数毎、又は歩数に基づく時間単位毎に出力する歩行タイミング決定手段と、加速度データから当該携帯端末の姿勢を決定する姿勢決定手段とを有する。姿勢決定手段は、加速度データから重力方向軸向きを決定する重力方向軸向き決定手段と、複数の加速度データからなる加速度面の法線ベクトルを近似的に算出し、該法線ベクトルから回転軸を決定する回転軸決定手段と、重力方向軸向き及び回転軸に基づいて進行方向軸を特定し、加速度データの合成加速度の大きさに基づいて連続する複数のピーク点を特定し、該ピーク点における進行方向軸方向の加速度に基づいて進行方向軸向きを決定する進行方向軸向き決定手段とを有する。
(もっと読む)
車両進行方向推定装置
【課題】 インフラ情報を利用して、交差点通過後の自車両の進行方向を推定することができる車両進行方向推定装置を提供する。
【解決手段】 車両進行方向推定装置のECUは、まず交差点に対応するノード及び交差点における道路の接続角度を含むインフラ情報を取得し、交差点通過前後の自車両の方位角平均値を順次求め、交差点通過前に対する交差点通過後の自車両の方位変化量Δを求める。そして、ECUは、自車両の方位変化量Δと任意方路のリンク接続角度との差分の絶対値が自車両の方位変化量Δと他の方路のリンク接続角度との差分の絶対値よりも小さく、且つ自車両の方位変化量Δと上記任意方路のリンク接続角度との差分の絶対値が角度誤差閾値よりも小さいかどうかを判断し、これを満足するときは、交差点通過後の自車両の進行方向が上記任意方路であると判定する。
(もっと読む)
位置特定装置、コンピュータプログラム及び位置特定方法
【課題】歩行者が地下街又は建物の中などの屋内にいる場合であっても、歩行者の位置を特定することができる位置特定装置、コンピュータプログラム及び位置特定方法を提供する。
【解決手段】歩行挙動判定部173は、測位部13の距離センサ132、方位センサ133、高度センサ134などで得られたデータに基づいて、歩行者の歩行挙動を判定する。位置推定部171は、歩行者の地図上の推定位置を算出し、誤差算出部172は、位置推定部171で推定した推定位置の誤差範囲を算出する。位置特定部175は、推定位置の誤差範囲内に、歩行挙動判定部173で判定した歩行挙動に関連する特徴地点があるか否かを判定し、特徴地点がある場合、その特徴地点を歩行者の位置として特定する。
(もっと読む)
加速度センサ及び地磁気センサを用いて歩行者の進行方向を決定する携帯端末、プログラム及び方法
【課題】歩行者が、携帯端末を手持ちで歩行している場合であっても、その携帯端末に搭載された地磁気センサのみを用いて、歩行者の進行方向をできる限り正確に決定する携帯端末、プログラム及び方法を提供する。
【解決手段】携帯端末の進行方向決定手段は、複数の加速度ベクトルから重力方向の重力ベクトルを導出し、且つ、該重力ベクトルに対応する地磁気ベクトルを選択する基準ベクトル導出手段と、記重力ベクトルと地磁気ベクトルからなる方位基準面の法線ベクトルを導出する方位基準面導出手段と、複数の加速度ベクトルから加速度面の法線ベクトルを近似的に算出する加速度面算出手段と、方位基準面と加速度面の両平面の法線ベクトルのなす角を方向角として算出する方向角算出手段とを有する。
(もっと読む)
位置特定装置、コンピュータプログラム及び位置特定方法
【課題】歩行者の位置を精度良く特定することができる位置特定装置、コンピュータプログラム及び位置特定方法を提供する。
【解決手段】歩行挙動判定部173は、距離センサ132、方位センサ133、高度センサ134などで得られたデータに基づいて、歩行者の歩行挙動を判定する。乗降判定部174は、歩行者の歩行挙動と移動時間又は振動特性とに基づいて、歩行者が地下鉄などの交通手段に乗車したか否かを判定する。位置特定部175は、乗降判定部174で歩行者が交通手段に乗車したと判定した場合、歩行者が乗車したと判定した時点からの経過時間及び交通機関の駅間の所要時間に基づいて、交通機関の路線に沿って歩行者の位置を特定する。
(もっと読む)
移動方向算出装置および移動方向算出プログラム
【課題】歩行体の移動方向を、位置情報を用いることなく、より高精度に算出すること。
【解決手段】移動方向算出装置110には、歩行体100の位置に応じた地磁気を測定する磁気センサ111と、歩行体100が歩行する際の旋回の角速度を測定するジャイロセンサ112とが搭載されている。そして歩行体100の歩行時に移動方向算出装置110は、磁気センサ111とジャイロセンサ112とのいずれか一方のセンサ出力(測定結果)を採用して歩行体100の移動方向を算出する。このとき、磁気センサ111とジャイロセンサ112とのいずれのセンサ出力を採用するかは、各センサのセンサ出力の変化量を参照して判断する。
(もっと読む)
磁気データ処理装置、磁気データ処理方法および磁気データ処理プログラム
【課題】動作環境に応じた最適な信頼性が保証された磁気データの利用を可能にする。
【解決手段】磁気センサから出力される磁気データを順次入力する入力手段と、複数の前記磁気データを母集団データ群として蓄積する蓄積手段と、前記母集団データ群の分布指数を導出する指数導出手段と、前記分布指数と判定基準とに基づいて前記母集団データ群の信頼性について合否を判定する信頼性判定手段と、前記母集団データ群の信頼性が合格と判定されると前記判定基準を厳格化し、前記母集団データ群の信頼性が不合格と判定されると前記判定基準を緩和する判定基準設定手段と、を備える磁気データ処理装置。
(もっと読む)
磁気データ処理装置、磁気データ処理方法および磁気データ処理プログラム
【課題】信頼性が保証された磁気データの利用を可能にする。
【解決手段】3次元磁気センサから出力される磁気データを順次入力する磁気データ入力手段と、複数の前記磁気データを母集団データ群として蓄積する蓄積手段と、3次元加速度センサから出力される加速度データを入力する加速度データ入力手段と、前記母集団データ群の分布を示す近似平面の垂線の方向と前記加速度データが示す加速度の方向との角度差の関数である信頼指数を導出する信頼性判定手段と、を備える磁気データ処理装置。
(もっと読む)
方位特定装置、位置特定装置、コンピュータプログラム及び方位特定方法
【課題】歩行者の移動方向の方位を精度良く特定することができる方位特定装置、位置特定装置、コンピュータプログラム及び方位特定方法を提供する。
【解決手段】位置更新部175は、地図マッチング法を利用して、属性判定部173で判定した誤差範囲内の属性(例えば、道路領域)と位置推定部171で算出した推定位置とに基づいて、誤差範囲内で歩行していると考えられる位置に推定位置を更新し、更新した位置を歩行者の位置として検出(特定)する。方位補正部178は、所定時間又は所定距離をカウントするための期間カウンタを備え、位置更新部175で歩行者の位置を道路上に特定した場合、測位方位をその特定位置の道路方位に補正することにより、歩行者の移動方向の方位を特定する。
(もっと読む)
加速度センサ及び地磁気センサを用いて歩行者の進行方向を決定する携帯端末、プログラム及び方法
【課題】歩行者が、携帯端末を手持ちで歩行している場合であっても、その携帯端末に搭載された加速度センサ及び地磁気センサを用いて、歩行者の進行方向をできる限り正確に決定する携帯端末、プログラム及び方法を提供する。
【解決手段】歩行者の進行方向を決定する進行方向決定手段とを有する携帯端末であって、進行方向決定手段は、時間経過に応じた加速度データ及び地磁気データを3次元座標系にプロットし、近似的な加速度面及び地磁気面を導出する平面近似手段と、加速度面と地磁気面との間の平面間角度φを算出する平面間角度算出手段と、平面間角度φに基づいて、地磁気面に対する方向角θを歩行者の進行方向として算出する方向角算出手段とを有する。
(もっと読む)
41 - 60 / 111
[ Back to top ]