
Fターム[2F129BB37]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正対象 (3,438) | 方位センサ (111)
Fターム[2F129BB37]に分類される特許
21 - 40 / 111
ナビゲーション装置
【課題】カメラからの映像を、地図情報と自車位置とのマップマッチング以外の用途にも利用することが可能なナビゲーション装置を提供する。
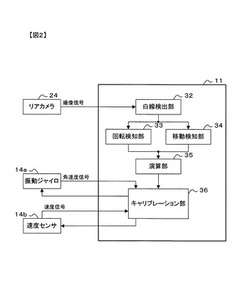
【解決手段】自車両の周辺を撮像し撮像信号を出力するリアカメラ24と、自車両の走行状態を表す信号を出力する振動ジャイロ14aおよび速度センサ14bと、リアカメラ24が出力する撮像信号に基づいてキャリブレーション情報を演算する演算部35と、キャリブレーション情報に基づいて、振動ジャイロ14aおよび速度センサ14bのキャリブレーションを行うキャリブレーション部36とを備えるナビゲーション装置。
(もっと読む)
リンク情報生成装置及びリンク情報生成プログラム

【課題】消費電力を低減しつつ、ユーザの直進距離の情報を含むリンク情報を高精度に算出する。
【解決手段】判定部34が、加速度情報検出部50により歩行が検知されている間に、地磁気情報検出部40により取得される地磁気の変化量に基づいて、ユーザの歩行状態を判定し、リンク情報算出部36は、加速度情報検出部50による検出結果と、判定部34による判定結果と、に基づいて、ユーザの直進距離の情報を含むリンク情報を算出する。
(もっと読む)
GNSS受信機、航法装置、信号処理装置、GNSS速度補正プログラム及びGNSS速度補正方法
【課題】アンテナの動揺による速度測定値の誤差を遅延無く除去することが可能であり、しかも特別な設定作業等を行う必要が無いGNSS受信機を提供する。
【解決手段】本実施形態のGPS受信機2は、GPSアンテナ4と、GNSS位置・速度算出部11と、磁気方位センサ5と、傾斜センサ6と、動揺速度除去部15と、を備えている。GPSアンテナ4は、船舶に取り付けられ、GPS衛星からの測位用信号を受信する。GPS位置・速度算出部11は、測位用信号に基づいて、GPS速度を算出する。磁気方位センサ5は、船舶の船首方向の絶対方位を検出する。傾斜センサ6は、GPSアンテナ4の傾斜角を検出する。動揺速度除去部15は、絶対方位及び傾斜角に基づいて、GPSアンテナ4の動揺による誤差を算出してGPS速度から除去する。
(もっと読む)
移動端末、処理装置及びプログラム
【課題】現在位置の取得精度を維持しつつ、省電力化を図る。
【解決手段】絶対位置取得部30が、歩き始めの地点、歩き始めの地点から一定距離L1だけ離れた地点、及び一定距離L2だけ離れた地点で端末本体10の絶対位置を取得し、現在位置取得部36が、当該絶対位置を用いて歩行経路補正部35により補正された歩行経路に基づいて、端末本体の現在位置を取得する。この場合、一定距離L1は、端末本体が移動する2点間の実際の方位と、当該2点において絶対位置取得部により取得される絶対位置から求められる2点間の方位との最大角度差が、所定範囲内となる2点間の距離であり、一定距離2は、端末本体が移動する2点間の実際の距離と、当該2点において絶対位置取得部により取得される絶対位置から求められる2点間の距離との最大距離差の実際の距離に対する割合が、所定範囲内となる2点間の距離とされている。
(もっと読む)
磁気データ処理装置、方法及びプログラムならびに磁気測定装置
【課題】蓄積された磁気データ群からオフセットを正確に導出できる磁気データ処理装置、方法及びプログラム、並びに磁気測定装置を提供する。
【解決手段】磁気センサから出力される磁気データqiを順次入力する入力手段(92)と、前記磁気データのオフセットを導出するために複数の前記磁気データを母集団データ群として蓄える蓄積手段(92)と、前記母集団データ群を構成する前記複数の磁気データのそれぞれを重み付けしたデータ群を母集団とする統計的手法により前記オフセットを導出する導出手段(94)と、を備える磁気データ処理装置。
(もっと読む)
情報処理装置で実行される地図データを処理するためのコンピュータプログラム、方法及び地図表示装置
【課題】情報処理装置の進行する方位を迅速に検出できるとともに、電子コンパスの外部干渉による影響を低減できるコンピュータプログラムを提供する。
【解決手段】複数の異なる時刻において、各時刻における情報処理装置1の現在位置を検出するステップと、検出された各時刻における情報処理装置の現在位置を示す位置データを記憶するステップと、記憶されている位置データに基づいて、情報処理装置が進行している第2の方位を算出するステップと、第2の方位を反映させて、地図データに基づく地図画像をディスプレイに表示させるとともに、地図画像上に情報処理装置の現在位置を表示させるステップと、所定の表示切替条件が満たされたか否かの判定を行うステップとが実現され、判定ステップによって表示切替条件が満たされたと判定された場合には、第2の方位が反映されてディスプレイ上に表示されている地図画像を、第1の方位を反映させた表示に切替る。
(もっと読む)
磁気センサ制御装置および方法
【課題】オフセットの算出に統計処理を用いる必要のない磁気センサ制御装置を提供する。
【解決手段】3次元磁気センサから順次出力される、3成分を有する複数の磁気データを入力する入力手段と、入力された複数の前記磁気データから、予め決められた4点選抜条件を満たす4つの前記磁気データを選抜する選抜手段と、選抜された4つの前記磁気データを成分とする4点から等距離にある点である中心点を算出する算出手段と、前記中心点の成分を前記磁気データのオフセットとして設定する設定手段と、を備え、前記4点選抜条件は、選抜候補の4つの前記磁気データを成分とする4点を頂点とする四面体の正四面体に対する歪みに相関する条件を含む、磁気センサ制御装置。
(もっと読む)
方位角計測装置
【課題】ホール素子を用いて検出された地磁気に基づいて、方位を計測する。
【解決手段】補正値記憶部7には、x軸ホール素子HExおよびy軸ホール素子HEyの基準値Lx、Lyが携帯端末10の使用状態ごとに記憶され、補正計算部6は、携帯端末10の使用状態に対応した基準値Lx、Lyを用いることにより、x軸ホール素子HExおよびy軸ホール素子HEyの出力増幅値Dx、Dyを補正し、地磁気の各軸成分に比例した値α、βだけを取り出す。
(もっと読む)
向き計測装置、向き計測システム、向き計測方法、及び向き計測プログラム
【課題】移動装置が、自装置の方向を正確に測定できること。
【解決手段】位置積分部1162は、位置の変化量を積分して移動ロボット1の位置を示す推定位置情報を推定する。方向積分部1161は、方向の変化量を積分して移動装置の方向を示す推定方向情報を推定する。位置補正部1163は、絶対位置測定装置から受信した位置情報であって時々刻々の移動ロボット1の位置を示す絶対位置情報と、時々刻々の推定位置情報と、を同定して、方向のずれを補正する方向補正値を算出する。方向補正部1164は、方向補正値を用いて、推定方向情報が示す方向を補正する。
(もっと読む)
方位角推定装置、方法及びプログラム
【課題】方位角計測センサを用いずに、位置計測センサの計測値のみから、方位角を推定する。
【解決手段】時刻ステップt−1において方位角Φs(t−1)の対象物が行動a(t−1)を取ったときに、時刻ステップt−1において(Zxa(t−1),Zya(t−1))に位置し、時刻ステップtにおいて(Zxa(t),Zya(t))に位置する確率P(Zxa(t),Zya(t),Zxa(t−1),Zya(t−1)|Φs(t−1),a(t−1))を用いて、Bel(Φs(t−1))=P(Zxa(t),Zya(t),Zxa(t−1),Zya(t−1)|Φs(t−1),a(t−1))・Bel0(Φs(t−1))の関係を満たす、時刻ステップt−1において対象物の方位角がΦs(t−1)である更新後確率Bel(Φs(t−1))を計測更新部18が計算する。
(もっと読む)
歩行計測装置、歩行計測方法およびプログラム
【課題】 歩行体の左右の歩行動作に非対称性があっても、正確な移動方向の計測が可能な歩行計測装置、歩行計測方法およびプログラムを提供する。
【解決手段】 歩行体に保持されて移動方向に関する物理量を検出する検出手段(ステップS1)と、この検出手段の検出により得られる前記物理量を表わす検出データのうち、左足を踏み出す歩行動作の際に得られる検出データと、右足を踏み出す歩行動作の際に得られる検出データとの何れか又は両方を、左右の歩行動作の大きさの違いに基づく前記検出データの差異を均衡させる方向に補正する補正手段(S9〜S11)と、この補正手段により補正された前記検出データに基づいて前記歩行体の移動方向を算出する移動方向算出手段(S12,S13)とを備えている。
(もっと読む)
方位角計測装置
【課題】ホール素子を用いて検出された地磁気に基づいて、方位を計測する。
【解決手段】補正値記憶部7には、x軸ホール素子HExおよびy軸ホール素子HEyの基準値Lx、Lyが記憶され、補正計算部6は、x軸ホール素子HExおよびy軸ホール素子HEyの出力増幅値Dx、Dyから回路的にキャンセル可能なオフセットを減じ、さらに基準値Lx、Lyを減算することにより、地磁気の各軸成分に比例した値α、βだけを取り出す。
(もっと読む)
ナビゲーション装置、補正値初期化方法及びナビゲーション機能付携帯電話機
【課題】地磁気センサによる方位の検出精度を高め得るようにする。
【解決手段】PND1の制御部11は、サスペンド状態から電源オン状態に切り替えられた際、地磁気センサ8から得られた地磁気データTMDを補正するための補正値を含む学習値LN及びその変動幅を制限する学習レベルLLについて、方位算出部28により初期化処理を行う。これにより方位算出部28は、サスペンド状態への移行直前と比較して周囲の磁場が大きく異なる場合や、サスペンド中にPND1内の金属部品等における磁化が変化した場合にも、学習値LNおよび学習レベルLLを確実に最初の値に戻し、学習し直すことができる。
(もっと読む)
自車影認識装置
【課題】 自車影領域を高精度に特定できる自車影認識装置を提供する。
【解決手段】 自車影認識装置11は、自車が走行している路面を含む範囲を撮像する自車周辺撮像装置300と、自車の現在位置の情報と、現在の日時の情報とから太陽の位置を算出する太陽位置算出手段110と、太陽位置算出手段110で得られた太陽の位置情報と、自車の進行方位情報と、自車の立体形状情報とから自車影が発生する領域を推定する自車影領域推定手段120と、自車影領域推定手段120から得られる座標情報に基づき、車両周辺撮像装置300で得られた画像の中から自車影領域を特定する自車影領域検出手段130と、を備えた。
(もっと読む)
磁気データ処理装置、磁気データ処理方法および磁気データ処理プログラム
【課題】3次元地磁気センサから出力される地磁気データのオフセット誤差を補正する磁気データ処理装置を提供する。
【解決手段】3次元磁気センサ20から出力される磁気データを順次取得しながら前記磁気データを母集団として繰り返し蓄積する蓄積手段91と、前記母集団が蓄積される度に、球面の方程式から導かれる目的関数f(p)の最小値を前記母集団の信頼指数Sとして導出し、前記母集団を十分信頼できるか否かを前記信頼指数Sを用いて判定する判定手段92と、前記母集団を十分信頼できる場合、前記母集団に基づいて前記磁気データのオフセットを導出するオフセット導出手段94a、94bと、を備える。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】自律航法用センサの方位計測の誤差修正を適宜行って、正確な位置情報を取得することのできる測位装置、測位方法およびプログラムを提供する。
【解決手段】現在位置を測定可能な測位手段と、相対的な移動量の計測と移動方向の計測とを行う移動計測手段と、基準地点の位置情報に前記移動計測手段の計測結果に基づく変位情報を積算することで移動経路上の各地点の位置情報を算出する位置算出手段とを備えた測位装置において、移動中に任意のタイミング(A,B)で測位手段により現在位置の測定を連続的に行わせるとともに、当該測定により得られた複数の位置情報に基づいて移動方向(a1)を求め、この移動方向(a1)に基づいて移動計測手段の移動方向の計測誤差(θ1)を修正する。
(もっと読む)
加速度センサ及び地磁気センサを用いて歩行者の進行方向を決定する携帯端末、プログラム及び方法
【課題】歩行者が携帯端末を手持ちで歩行している場合に、その携帯端末の加速度センサ及び地磁気センサを用いて、歩行者の進行方向を正確に決定する携帯端末等を提供する。
【解決手段】携帯端末は、腕振りに基づく加速度面に対する法線ベクトルとなる歩行基準ベクトルを算出する歩行基準ベクトル算出手段と、重力ベクトルとそれに対応する地磁気ベクトルとを導出し、両ベクトルの方位基準面に対する法線ベクトルとなる方位基準ベクトルを算出する方位基準ベクトル算出手段と、両ベクトルに基づいて進行方向の方位角を算出する方位角算出手段とを有する。歩行基準ベクトル算出手段は、時間経過に伴う合成加速度の変化の中で、極小点同士の間の時間間隔を計測し、隣り合う2つの時間間隔を比較し、長い時間間隔の終点時の極小点は加速度面前方(進行方向前方)を表し、短い時間間隔の終点時の極小点は加速度面後方(進行方向後方)を表す。
(もっと読む)
携帯電子機器及び地磁気センサ較正方法
【課題】電磁結合による非接触通信に伴う地磁気の検出精度の低下等に起因する方位に関する表示制度の低下を抑制できる携帯電子機器とその地磁気センサ較正方法を提供する。
【解決手段】非接触通信機能部(111)において非接触通信が行われた場合、その通信の終了後に地磁気センサ(110)のキャリブレーションに関わる処理および方位の算出する処理を実行することにより、非接触通信に伴う方位に関する表示精度の低下を抑制する。
(もっと読む)
計算機装置
【課題】GPS方位計において、整数値バイアスを少ない計算負荷により短時間で導出する。
【解決手段】GPSアンテナ9および10のアンテナ間距離を、GPS衛星11からの測位信号の搬送波の1/2波長以下とするとともに、GPS信号受信部7および8が用いる基準クロックを共通にすることによって、方位計算部12は、GPS信号受信部7および8から得られる信号を用いて、搬送波位相観測値の一重差方程式に含まれる整数値バイアスを簡単な代数計算だけで解ける。
(もっと読む)
携帯電子機器及び地磁気センサ較正方法
【課題】地磁気センサのキャリブレーションに関わる処理を適切なタイミングで実行することができる携帯電子機器と、その地磁気センサ較正方法を提供する。
【解決手段】省電力モードにおいてキー入力部(103)のキーが操作されると、省電力モードが終了するとともに、地磁気センサ(110)の検出値のキャリブレーションに関わる処理が実行される。これにより、ユーザが表示部(107)の画面を見ようとしている状態でキャリブレーションに関わる処理が実行されるため、地平面に対する筐体の角度が適切な状態でキャリブレーション処理を実行し、方位の算出精度を向上することができる。また、ナビゲーションアプリ(方位の算出と表示に関わる処理)の起動中にキャリブレーションに関わる処理を実行することによって、方位の算出と表示を行わない状態で無駄なキャリブレーションを行わないため、消費電力の増大を抑制できる。
(もっと読む)
21 - 40 / 111
[ Back to top ]