
Fターム[2G087DD03]の内容
Fターム[2G087DD03]に分類される特許
1 - 20 / 48
動力伝達用シャフト
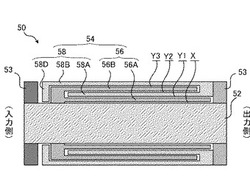
【課題】大きな減衰効果を得ることのできる動力伝達用シャフトを提供する
【解決手段】動力伝達用シャフト50は、動力を伝達するシャフト本体52と、シャフト本体52と中心線が一致するように配置された多重円筒部材54と、を備え、多重の円筒部材54は、その片側の端部のみがシャフト本体52の一方側の端部に一体的に取り付けられた第1の円筒部材56と、その片側の端部のみがシャフト本体52の他方側の端部に一体的に取り付けられた第2の円筒部材58とを有し、第1の円筒部材56と第2の円筒部材58との間には粘性体の封入空間Y1〜Y3が円筒状に形成される。
(もっと読む)
エンジン試験方法および装置

【課題】安全性を確保でき、且つ、試験前の準備作業を簡単に行うことのできるエンジン試験方法および装置を提供する。
【解決手段】エンジン試験装置10は、試験対象であるエンジン12に負荷を与えるダイナモメータ14と、エンジン12及びダイナモメータ14を制御する制御装置20とを備える。制御装置20は、制御指令値を出力する制御器40と、エンジン12及びダイナモメータ14を含む実機部をモデル化したベンチモデルを有し、ベンチモデルに制御指令値を入力してシミュレーションを実行するシミュレーション部42と、シミュレーションの結果に基づいて制御器40からの制御指令値の出力先をシミュレーション部42と実機部とで切り替える切替手段44を備える。切替手段44は、シミュレーション部42のシミュレーションの結果が所定の範囲内である場合に、制御指令値の出力先をシミュレーション部42から実機部に切り替える。
(もっと読む)
エンジン試験方法及び装置
【課題】応答性とロバスト性の高い制御を行うことのできるエンジン試験方法及び装置を提供する。
【解決手段】エンジン試験装置10は、エンジン12に負荷を与えるダイナモメータ14と、エンジン12とダイナモメータ14にそれぞれ制御指令値を与える制御装置20と、を備える。制御装置20のシミュレーション部42は、エンジン12及びダイナモメータ16を含む実機部をモデル化したベンチモデルを有し、ベンチモデルに制御指令値を入力してシミュレーションを行う。制御装置20の制御器40はシミュレーションの結果を入力して制御指令値を決定し、シミュレーション部42と実機部に出力する。
(もっと読む)
軸トルク制御装置
【課題】負荷側モータ(エンジン)の回転数制御と駆動モータ(動力計)の軸トルク制御の干渉を抑制した軸トルク制御ができる。
【解決手段】軸トルク制御器は、エンジンが速度制御されている場合に動力計に対するトルク外乱を外乱オブザーバ21により推定して動力計のトルク指令値にフィードバックすることにより動力計の加速度制御系を構成する。さらに、軸トルク検出値または軸トルク推定値を共振比制御理論に基づいて決定されるゲインKr(28)で動力計の加速度指令値にフィードバックし、さらにまた、動力計の速度検出値ω2を所定の共振抑制効果が得られるように決定したゲインKvで動力計の加速度指令値にフィ−ドバックし、及び、軸トルク指令値に軸トルク検出値が追従するように比例積分制御系23を構成する。
(もっと読む)
動力計の軸トルク制御装置
【課題】中間軸を持つエンジンベンチシステムにおけるカップリングのばね剛性に起因する共振を抑制でき、さらにはクラッチのばね剛性に起因する共振も抑制できる。
【解決手段】軸トルク検出値T23を低域通過フィルタ(LPF)21を通して動力計トルク指令値T23refに加算して新たな動力計トルク指令値とする。20は中間軸を持つエンジンベンチシステムの3慣性系機械モデルで置き換えたシステムである。低域通過フィルタに代えて無駄時間要素(TD)とする構成、さらに低域通過フィルタまたは無駄時間要素を通した動力計の軸トルク検出値を高域通過フィルタ(HPF)を通した構成、さらにまた動力計トルク指令値に対して低域通過フィルタを通した軸トルク検出値でフィードバック制御する軸トルク制御器を組み合わせた構成とする。
(もっと読む)
ダイナモメータシステムの軸トルク制御装置
【課題】少ない可調整パラメータで機械系の共振ゲインを抑制し、安定で高応答な軸トルク制御が可能なダイナモメータシステムの軸トルク制御装置を提供する。
【解決手段】ダイナモメータの電動機の駆動トルクT1,負荷側電動機の慣性1/JL・s、電動機慣性と負荷側電動機慣性のバネ剛性K12/sおよび電動機の慣性1/Jsh・sに基づいて2慣性機械系モデル18を構成し、軸トルクの検出値Tshを求め、減算器11でトルク指令Trefから前記Tshを減算し、減算器11の出力に積分要素KI/sを乗じた値と、前記Tshに比例ゲインKを乗じた値とを加算器14で加算し、加算器14の加算出力T2に、前記電動機駆動用のインバータの周波数応答を1次遅れとして近似した伝達関数1/(ACRfc・s+1)を乗じた値を前記2慣性機械系モデル18に導入し、KI=(1−K)・2・π・fcを用いて2慣性の軸トルク制御を行なう。
(もっと読む)
軸連結補助装置および軸連結方法
【課題】雄、雌のスプライン軸を嵌合する場合に、スプライン軸相互の軸芯を一致させる作業が面倒である。
【解決手段】互いに連結しようとする一対の回転軸4、6の端部に、雄、雌一対のスプライン軸7、11を取り付け、これらの嵌合により一対の回転軸を連結する軸連結装置において、スプライン軸7、11の軸芯を合わせるための軸連結補助装置21である。軸連結補助装置21は、一方のスプライン軸7の外側に、該スプライン軸7と同芯状に配置された芯出しリング22と、他方のスプライン軸11の外側に、該スプライン軸を中心とする同一円周上に所定の角間隔をもって配置されていて、スプライン軸7、11の嵌合に先立って、芯出しリング22の外周面に係合してスプライン軸7、11の軸芯を合わせる複数本の芯出しピン23と、を備えている。
(もっと読む)
エンジンの駆動方法および装置
【課題】大型化したり、油量を大幅に増加したりすることなく、ピストンを正確に変位させることのできるエンジンの駆動方法および装置を提供する。
【解決手段】試験装置10は、燃焼室用ピストン14を油圧によって駆動する油圧式アクチュエータ20を備える。油圧式アクチュエータ20は、駆動用シリンダ22と、駆動用シリンダ22内に配置された駆動用ピストン24と、駆動用ピストン24に連結されたロッド26と、駆動用シリンダ22内に設けられて駆動用ピストン24によって隔てられるとともに駆動用ピストン24を受圧面とする二つのピストン側油圧室22A、22Bと、ロッド26の端面を受圧面とする端面側油圧室22Cと、ピストン側油圧室22A、22Bと端面側油圧室22Cに圧油を供給・排出する油圧回路30と、油圧回路30の圧油の供給・排出を制御する制御装置44と、を備える。
(もっと読む)
動力系の試験装置及びその制御方法
【課題】応答遅れを抑制し、吸収側の動力部であるダイナモメータの速度を高精度に制御することができる、動力系の試験装置及びその制御方法を提供すること。
【解決手段】目標速度値V1が微分されて加速度値A2が得られ、加速度値A2に基づき目標トルク値T1が算出される。この目標トルク値T1が、吸収側トルク計6で検出された実トルク値T4に近づくようにPIアンプ52により制御される。目標速度値V1は予め設定された既知の情報であるので、目標速度値V1が微分された値である加速度値A2もほとんど遅延なく得ることができる値となる。したがって、フィードバック制御の応答遅れを抑制することができ、高精度にダイナモメータ2の速度を制御することができる。
(もっと読む)
走行抵抗模擬装置
【課題】精度良く走行抵抗を模擬することができる走行抵抗模擬装置を提供する。
【解決手段】走行抵抗模擬装置4は、パワートレーン1からの出力を計測する動力計10と、パワートレーン1の出力軸2aと動力計10の入力軸10aを接続する回転軸5と、回転軸5に、走行状態にある車両に生じる走行抵抗Fを模擬した負荷を付与する負荷付与装置と、を備えるものであって、前記負荷付与装置は、転がり抵抗f1を模擬した負荷を付与する第一の負荷付与装置である転がり抵抗付与装置6と、勾配抵抗f2を模擬した負荷を付与する第二の負荷付与装置である勾配抵抗付与装置7と、空気抵抗f3を模擬した負荷を付与する第三の負荷付与装置である空気抵抗付与装置8と、加速抵抗f4を模擬した負荷を付与する第四の負荷付与装置である加速抵抗付与装置9と、を備える。
(もっと読む)
過渡運転性能適合試験装置、過渡運転性能適合試験方法及び制御プログラム
【課題】加速状態において所定の基準を満たしながら、トレードオフの関係となる最適なエンジンの出力を発揮することができるエンジンの設定値を選択することを目的とする。
【解決手段】エンジン2の制御要素に係る設定値に従って制御駆動されたことにより出力され、互いにトレードオフの関係となる複数種の出力要素に係る出力値の組み合わせを、所定の時間加速させた状態で設定値を複数変更して取得するデータ取得部121と、出力値の組み合わせと設定値とを対応付ける対応付け部123と、対応付け部123により対応付けられた複数の出力値の組み合わせに基づいて、他の出力値の組み合わせに優越しない出力値の組み合わせである最適解を選択する最適解選択部126と、を備える。
(もっと読む)
エンジン試験方法及び装置
【課題】試験時間を短縮することができ、且つ、慣性値の分からないエンジンであってもエンジントルクも精度良く求めることができるエンジン試験方法及び装置を提供する。
【解決手段】エンジンベンチ10は、エンジン11に接続されてエンジン11に負荷を与えるダイナモメータ20と、エンジン11にかかるトルクを計測するトルクメータ23と、エンジン11の回転数またはスロットル開度を変化させながらトルクメータ23の計測値を記憶し、トルクメータ23の計測値からエンジン11のトルクを演算する信号処理部40およびシステム制御部50と、を備える。システム制御部50は、回転数とスロットル開度が同じ値での変化速度値が等しくなるように回転数またはスロットル開度の増加と減少を行いながらトルクを計測するとともに、回転数とスロットル開度が同じ値における増加時トルク計測値と減少時トルク計測値との平均を算出し、エンジントルクを求める。
(もっと読む)
エンジンベンチ
【課題】応答性が良く、エンジンの温度変動を極力抑えることのできるエンジンベンチを提供する。
【解決手段】エンジンベンチ10は、エンジン12に接続されて負荷を与えるダイナモメータ20と、エンジン12とダイナモメータ20を制御するエンジン・ダイナモ制御部30と、エンジン12を冷却する冷却装置60と、冷却装置60を操作することによってエンジン12の温度を制御する温度制御装置70と、運転パターンとエンジンモデルに基づいてシミュレーションを実行し、その結果に基づいてエンジン・ダイナモ制御部30を操作する運転管理部40とを備える。温度制御装置70は、シミュレーションの結果を用いてエンジン12の発熱量を予測し、冷却装置60の操作量と操作時間差を決定するとともに、冷却装置を、エンジン・ダイナモ制御部30の操作によりも前記操作時間差の分だけ先に前記操作量で操作する。
(もっと読む)
ハイブリッド車用試験装置
【課題】エンジン,モータ,連結装置の各単体が分散した環境で、ハイブリッド車用試験装置を実現する。
【解決手段】ダイナモにより負荷トルクが与えられる連結装置を介してエンジンとモータとが連結され、実車のモデルを内蔵した計測制御部より前記エンジン、前記モータ、前記ダイナモに試験のための走行情報が設定される試験装置において、エンジンと、これに負荷トルクを与えるダイナモと、エンジン用計測制御部とを具備するエンジン単体試験装置と、モータと、これに負荷トルクを与えるダイナモと、モータ用計測制御部とを具備するモータ単体試験装置と、連結装置とこの連結装置の連結腕に負荷トルクおよび駆動トルクを与える複数のダイナモと、連結装置用計測制御部とを具備する連結装置単体試験装置と、前記各単体試験装置内の計測制御部と通信し、これら計測制御部に試験のための走行情報を与える、実車のモデルを内蔵した統合計測制御部と、を備える。
(もっと読む)
排ガス計測システム
【課題】排ガス成分計測前に適切な前処理を行って計測精度を高める。
【解決手段】この前処理では、まず空気精製機2の吸着材11を高温精製空気によりパージし、次いで排気連結管7を高温精製空気によりパージする。排気連結管7のパージと並行してサンプリング装置4をパージする。これらパージ後、低温精製空気を用いてサンプリング装置4のパージが完了したか否かを判定する。パージ完了判定後、低温精製空気を用いて空気精製機2の診断を行い、次いで較正ガスを用いてシステム全体を診断する。
(もっと読む)
負荷装置
【課題】流体力で再現できる負荷変動周期よりも短い周期の負荷変動を再現可能とする。
【解決手段】水制動機12では、タービン16を収容するケーシング15内に一定量の水を滞留させ、タービン16にケーシング15内の水により制動力を与える。タービン16が取り付けられた回転シャフト13にモータ/ジェネレータの回転子21を設け、その周囲にケーシング26に固定された固定子22を配置し電気制動機12とする。連結器14を介して回転シャフト13を動力性能試験の対象となる大型機関Eの主軸に連結する。長周期(または一定)の大きな制動力は水制動機11により与え、短周期の小さな制動力は電気制動機12で与える。
(もっと読む)
被試験体の試験装置
【課題】加減速の時でも正確な試験ができる被試験体の試験装置を提供する。
【解決手段】被試験体1に負荷を与えるための負荷装置2と、負荷装置2の出力側に連結されるフライホイール8とを備え、負荷装置2からの負荷をフライホイールを介して被試験体1に与えることにより試験を行う被試験体の試験装置であって、フライホイール8の負荷装置側となる入力側に、負荷装置2の出力トルクを検出する第1トルク計7を配置し、フライホイール8の出力側に、被試験体の出力トルクを検出する第2トルク計6を配置した。
(もっと読む)
エンジンマウントの変位量計測方法
【課題】高速な振動現象の下にあっても、エンジンマウントのマウント軸として配設されるボルトの中心の3軸並進量、及び、該ボルトの3軸回転量を高精度に算出することができる、エンジンマウントの変位量計測方法を提供する。
【解決手段】ボルト12の一端に配設した検出体34の3次元座標をステレオカメラ33で計測することにより、ボルト12の中心Kの位置座標O及びボルト12の姿勢角を算出するカメラ計測工程と、ボルト12の一端に配設した加速度ピックアップ31で計測したボルト12の3軸加速度を二階積分することにより、ボルト12の3軸変位量を算出する加速度検出具計測工程と、ボルト12の姿勢角に基づいてボルト12の3軸変位量をカメラ座標系における変位量に変換する変位量変換工程と、ボルト12の中心Kの位置座標Oに基づいて加速度検出具計測工程において行う二階積分の初期値を修正する座標修正工程とを備える。
(もっと読む)
動力伝達系の試験装置およびその制御方法
【課題】ダイナモメータの高周波の速度変動に対しても十分に追従させることが可能な動力伝達系の試験装置を提供する。
【解決手段】第2指令トルク算出部30は、第1指令トルクT1(第1指令トルクT1:指令速度と実速度ω0の速度偏差から算出されるトルク)から推定される推定速度ω1と実速度ωとの速度偏差から第2指令トルクT2を推定し、この第2指令トルクT2と第1指令トルクT1とを加算して得たトルクを指令トルクTをしてダイナモメータ3に出力する。この第2指令トルクT2は、ダイナモメータ3に加わる外力、つまり供試体モータ2から発生するトルクおよび慣性力を推定したトルクとなり、外力等の影響がうち消されたトルクとなる。
(もっと読む)
エンジンベンチシステムの動力計制御方式
【課題】軸トルクや速度が振動的になるのを抑制でき、安定なエンジン試験を効率よくできる。
【解決手段】エンジン1に動力計4をシャフト3で結合し、エンジンの各種特性を測定するエンジンベンチシステムにおいて、エンジンベンチシステムの機械系を2慣性系エンジンベンチモデルとし、このモデルの運動方程式と動力計制御特性の閉ループ特性の5次多項式P(s)を適切に設定した5次多項式の特性になるように、動力計制御パラメータを決定することにより、機械系の共振動作を抑制する動力計のトルク指令を得る。動力計のコントローラ9は、結合シャフト捩れトルク(軸トルク)T12と、動力計速度指令w2refと、動力計角速度w2と、パラメータ(Ki,Kp,b1,b0,a1)から演算要素9A〜9Dにより動力計トルク指令T2refを求めて動力計を制御する。
(もっと読む)
1 - 20 / 48
[ Back to top ]