
Fターム[2H040AA02]の内容
Fターム[2H040AA02]に分類される特許
41 - 60 / 124
点検鏡
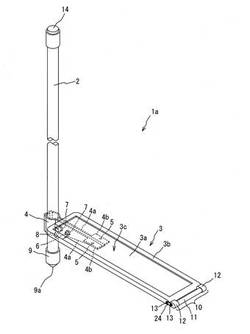
【課題】ベルトコンベアの下部又は内部のように作業者が直接目視することのできない狭所を広範囲にわたり容易に観察することができる点検鏡を提供する。
【解決手段】平板状の鏡面体3と、鏡面体3の遠隔操作を可能にするための主杆2と、主杆2の端部の近傍に設けられ,鏡面体3の鏡面3cが主杆2を仰ぎつつその軸方向に対して垂直をなすように鏡面体3を支持固定する支持具4と、鏡面体3において,主杆2から離れる側の端部に設けられ被点検対象を照らす光源10と、主杆2の端部に設けられるピボット9と、光源9を発光させる発光手段とを有することを特徴とする点検鏡1aによる。
(もっと読む)
内視鏡及び内視鏡観察システム

【課題】内視鏡の観察窓に隣設する発光部から出射される照明光で、凹部内、或いは凹凸部を有する表面の検査を行う場合に、影の発生による観察不良を防止して、良好な観察画像を得られる内視鏡を提供する。
【解決手段】挿入部の先端部に観察窓21及び照明窓31を備える内視鏡は、観察窓21及び照明窓31の先端側に配置される照明範囲変換部40を備える。照明範囲変換部40は、照明光入射面42a、観察窓21の一部を外部に対して露出させる開口41、照明光出射面42b、及び照明光出射面42bと開口41を挟んで対向する位置に設けられる、照明窓31の光軸に対して傾斜して配置され、入射した照明光の一部を外部に出射させる一方、残りの照明光を開口41方向に反射させる反射面を兼ねる第1傾斜面45を備える変換部本体42と、開口41を通過して到達した照明光を照明光出射面42bに向けて反射させる反射板43とを具備する。
(もっと読む)
内視鏡装置および計測方法
【課題】計測により適した位置をユーザに知らせることができる内視鏡装置および計測方法を提供する。
【解決手段】CPU18は、被写体の表面の曲率情報に基づいて、その表面を近似する平面とその表面との交点のうち2つの交点間の空間距離を算出する。映像信号処理回路12は、映像信号に基づく画像上に、2つの交点間の空間距離分の幅を示す目印を表示するための表示信号を生成する。CPU18は、画像上で指定された点の空間座標を算出し、少なくとも3点の空間座標で決まる平面と1点の空間座標との空間距離を算出する。
(もっと読む)
管内観察カメラ装置
【課題】カメラの挿入方向前方側、および、カメラの挿入方向に直交する側面の両方の状況を確認できる装置を簡単な構成で安価にして提供する。
【解決手段】管路内に挿入する装置本体11の先端側の球状部11aに、管路内を撮影する1台のカメラ12を設けるとともに、先端側の外周に周方向に所定間隔を隔てて、管路内を照射するLED13を6個設ける。カメラ12に、ハードケーブル14を介してモニタ15を接続する。装置本体1に、カメラ12の挿入方向に対して傾斜した鏡面部19を形成した反射部材17を、電気テープ16によって一体的に取り付ける。これにより、カメラ12の挿入方向前方側、およびカメラ12の挿入方向に直交する側面側の両方の管路内の状況をカメラ12で撮影し、その撮影画像をモニタ15に表示できる。
(もっと読む)
内視鏡装置
【課題】固定式とアダプタ交換式のいずれも接続できかつ小型の内視鏡装置を提供する。
【解決手段】内視鏡装置100は、LED5を含む光学アダプタ4が装着可能なアダプタ交換式の内視鏡1BとLED5が内蔵された挿入部を有する固定式の内視鏡のいずれについても接続可能である。内視鏡装置100は、定電流回路2bと、光学アダプタ4の種類を判定するアダプタ種類判定回路と、アダプタ交換式の内視鏡か固定式の内視鏡かを示す内視鏡種類情報を読み出して、接続された内視鏡がアダプタ交換式の内視鏡か固定式の内視鏡かを判定し、アダプタ交換式の内視鏡の場合は、アダプタ種類判定回路の判定結果に基づく、所定の第1の値の電流をLED5に供給するように、定電流回路2bを制御し、かつ固定式の内視鏡の場合は、所定の第2の値の電流をLED5に供給するように、定電流回路2bを制御する制御回路2aとを有する。
(もっと読む)
像面湾曲を利用し被写界深度を湾曲させたレンズ及びその利用方法
【課題】本発明の課題は、従来技術のように特殊な画像処理技術を用いることなく、新しい特殊なレンズを用いるだけで遠くから近くまでの連続領域全体にピントのあう画像を撮影する技術を提供することにある。
【解決手段】本発明の被写界深度を湾曲させたレンズは、像面湾曲を逆補正や過補正することにより、被写界深度の形状を極度に湾曲させるようにした。また、本発明の全焦点画像を撮影する光学装置は、上記の極度に湾曲した被写界深度をもつレンズを用いることにより、湾曲と合致する物体の表面をピントのあった画像として撮影できるものとした。
(もっと読む)
配管の亀裂箇所の点検修理方法
【課題】 配管の亀裂箇所の点検修理を容易に、かつ確実に行うことができる点検修理方法を提供する。
【解決手段】 配管1の亀裂箇所3の点検修理方法であって、前記配管1の亀裂3aを超音波探傷検査により検出し、該超音波探傷検査により検出した亀裂箇所3の近傍に前記配管1を貫通する点検修理用孔4、5を設け、該点検修理用孔4、5内に撮像手段10及び修理手段12を挿入し、前記撮像手段10により前記亀裂箇所3を目視しながら、前記修理手段12により前記亀裂箇所3の修理を行い、この後に、前記撮像手段10及び前記修理手段12を前記点検修理用孔4、5から抜き出し、前記点検修理用孔4、5を閉塞手段で閉塞する。
(もっと読む)
内視鏡装置
【課題】検査終了後の追跡調査等においても過去に記録した画像の全ての領域を確認でき、かつ撮影した画像に付加情報を記録することによって画像の改竄防止を行うことができる工業用内視鏡装置を提供する。
【解決手段】撮像手段が撮像して得られた画像信号を映像信号として出力する映像出力手段と、撮像手段が撮像して得られた画像信号の付加情報を、映像出力手段が出力する映像信号に重畳し、付加情報が重畳された映像信号を出力する付加映像出力手段と、映像出力手段が出力した映像信号、付加映像出力手段が出力した付加情報が重畳された映像信号のいずれかを選択する映像信号切り替え手段と、映像信号切り替え手段によって選択された、映像出力手段が出力した映像信号、付加映像出力手段が出力した付加情報が重畳された映像信号のいずれか、または両方を画像データとして記録する画像記録手段と、を備える。
(もっと読む)
光走査型内視鏡プロセッサおよび光走査型内視鏡システム
【課題】光走査型内視鏡の先端から管腔の側壁を正面視した画像を作成する。
【解決手段】光走査型内視鏡プロセッサは光源ユニット、アクチュエータ駆動回路、受光ユニット23、および画像信号処理部を有する。光源ユニットから白色光が照明用光ファイバに照射される。アクチュエータ駆動回路にアクチュエータを駆動させる。アクチュエータは照明用光ファイバに螺旋状の走査経路に沿って白色光を照射するように傾斜させる。受光ユニット23は白色光の反射光に応じた画素信号を生成する。画像信号処理部30はバッファメモリ32および側面画像メモリ35を有する。生成された画素信号をバッファメモリ32に格納する。正面画像において定められた扇形の領域に位置する画素の画素信号を抽出して、側面画像メモリ35に格納する。
(もっと読む)
内視鏡装置および内視鏡画像用プログラム
【課題】操作に係るユーザの負担を軽減することができる内視鏡装置および内視鏡画像用プログラムを提供する。
【解決手段】CPU18は、映像信号に基づく画像上の位置を指定するカーソルの移動指示をリモートコントローラ4から検出する。CPU18は、映像信号に基づいて、カーソルによって指定された位置を基準とする位置における画像の特徴量を算出する。CPU18は、カーソルの移動指示が検出された場合に、特徴量に応じて、画像におけるカーソルの移動を制御する。
(もっと読む)
計測装置
【課題】管状の被計測物の計測を容易に行うことができる計測装置を提供することを課題としている。
【解決手段】管状の被計測物2の内周面2a全周にわたって光を照射する照射手段4と、照射手段4により照射された光の反射光を投影する投影手段6と、投影手段6に投影された像を撮像する撮像手段7とを備え、照射手段4と撮像手段7とを対向して配置し、投影手段6を、照射手段4と撮像手段7との間に配置し、照射手段4を、前記内周面2aの照射手段4と撮像手段7との間に線状のリング光Lを形成するように、光を円錐状に拡げて内周面2aに照射する構成とし、投影手段6に前記リング光Lを投影し、投影手段に投影されたリング光を撮像手段7により撮像し、被計測物2の計測を行う。
(もっと読む)
内視鏡搬送装置及びそれを用いた内視鏡システム
【課題】精度よく、内視鏡による管状構造物内の時系列画像の撮像を可能とするための内視鏡搬送装置及びそれを用いた内視鏡システムを提供する。
【解決手段】内視鏡搬送装置100は、内視鏡2を把持した検査者の手300が載置される手置台101と、手置台101を所定の速度で搬送可能な搬送手段103と、搬送手段の搬送動作を制御する制御手段107とを備える。
(もっと読む)
内視鏡
【課題】 低消費電力で、安全基準条件を満たす電子内視鏡を提供すること。
【解決手段】 内視鏡1の先端部11内には照明用LEDを配置した照明部21と、照明光によって照らされた観察像を撮像するC−MOS23とが設けられている。操作部15内には照明部21及びC−MOS23に電力を供給する電池24が配置されている。操作部15の基端部には表示装置2へ映像信号を出力するビデオケーブル16の一端部が接続される映像出力端子部25が設けられている。電池24と、照明部21及びC−MOS23とは照明用電源ケーブル27と撮像素子用電源ケーブル28とに分岐する電源供給用ケーブル26によって接続されている。電源供給用ケーブル26の中途部には照明部21及びC−MOS23に過剰電流が流れることを防止する電流制限回路29が設けてある。映像出力端子部25にはC−MOS23から延出する映像信号伝送ケーブル30が接続されている。
(もっと読む)
管内検査カメラ装置
【課題】作業性に優れた、信頼性の高いカメラヘッドの滑動部被嵌構造を有する管内検査カメラ装置を提供する。
【解決手段】円筒状胴体部11の外周面に係合用溝部12を設けたカメラヘッド10と、胴体部11の先端側からカメラヘッド10に脱着可能に被嵌され、内周面に螺合部22bを有する後部スキッド部材22と、胴体部11の先端側からカメラヘッド10に脱着可能に被嵌され、係合用溝部12に係合する爪部21cを有するとともに、後部スキッド部材22の螺合部22bに螺合する螺合部21bを有し、螺合部21b,22b相互を螺着することにより、爪部21cを溝部12に係止させて、後部スキッド部材22と結合するスキッド部材21と、前部スキッド部材21および後部スキッド部材22の外周面に設けられ、拡径方向に膨出する滑動部fa,fbとを具備する。
(もっと読む)
管内移動体用アクチュエータ、内視鏡
【課題】推進機構を管壁に確実に接触させつつ、管壁に不要な後退動作を伝えず推進力のみを確実に伝えること。
【解決手段】管内移動体用アクチュエータにおいて、第1部位と前記第1部位の両端に接続される1対の第2部位とを備え管壁に対し推進力を与えるための推進機構と、前記第1部位を前記管壁に当接させた状態で一方の前記第2部位を収縮状態から伸長状態に変化させ他方の前記第2部位を伸長状態から収縮状態に変化させることにより前記第1部位が前記管壁に対し推進力を与えるように制御する制御部と、を有することを特徴とする。
(もっと読む)
工業用内視鏡
【課題】経済的に有利な構成で、カメラヘッドの小型小径化を容易に図ることができる工業用内視鏡を提供する。
【解決手段】押し込みケーブルの先端に取り付けられたカメラ本体1と、前記カメラ本体1の前部に設けられた撮像レンズ2と、前記撮像レンズ2の周囲に複数の発光素子7を設け、前記各発光素子7により撮影対象を照明する照明ユニットと、前記照明ユニットの照射光を透過させ、前記照明ユニットを保護して、前記照明ユニットの一部照射光を全反射させ、外側に導光させる反射面を有した照明カバー8と、を具備する。
(もっと読む)
撮像素子を用いた弧状フレキシブル回路薄膜型内視鏡装置
【課題】撮像素子としてCCDカメラまたはCMOSセンサーを内蔵したヘッドハウジングにフィルム状のフレキシブル回路薄膜を連結した構成にして例えばロボットなどの狭い空間に装着し、狭い伝熱管の内部を検査し易いながらも、曲げ半径が小さくて狭小な空間内で取り扱い易い、撮像素子を用いた弧状フレキシブル回路薄膜型内視鏡装置の提供。
【解決手段】本発明の撮像素子を用いた弧状フレキシブル回路薄膜型内視鏡装置は、撮像素子と照明手段が装着されるヘッドハウジングからなり、イメージを撮影するイメージ撮影手段と、被検査物の空間内に挿入できるように弧状軟性薄板、絶縁接着フィルム、回路フィルムおよび絶縁保護フィルムが積層されてなり、一端部に前記撮像手段が連結され、他端部にコネクタを介して伝送ケーブルが連結される被検査物内挿入手段とを含んでなる。
(もっと読む)
輝度及び色差を用いた管路点検用画像解析方法、画像解析装置、管路点検システム及びプログラム
【課題】リアルタイムで高精度に管内の状況を定量化したデータを取得する技法を提供する。
【解決手段】本発明による画像処理方法は、パイプカメラによって撮影された地中埋設管内の画像を取得するステップと、取得された画像を解析し、所定の範囲の色を有する箇所を抽出するステップと、抽出された箇所と前記地中埋設管の管内面積との比率を算出するステップと、算出された比率を補正するステップとを含む。
(もっと読む)
内視鏡用ガイドチューブ及び内視鏡システム
【課題】内部が複雑な形状で、かつ、高温環境下であったとしても内視鏡装置の挿入部により被検体の内部を好適に観察することを可能とさせる内視鏡用ガイドチューブ及び内視鏡システムを提供する。
【解決手段】内視鏡用ガイドチューブ20は、内視鏡装置2の挿入部3の内の先端側が少なくとも挿入される略管状で、挿入部3の外周面との間に冷却用流体Aが流れる冷却用流路21を形成するガイド本体22と、冷却用流路21に冷却用流体Aを流通させる流体供給手段とを備え、ガイド本体22は、少なくとも一つの曲部25aを有して基端側の向きに対して先端側の向きが異なるように配設された第一のシース25と、第一のシース25の先端から突出して進退可能な第二のシース26とを具備する。
(もっと読む)
内視鏡装置
【課題】実際に階調特性の変更処理を行う処理領域を、被写体画像の輝度分布に応じて可変設定することができる内視鏡装置を提供する。
【解決手段】CCD11で撮像された被写体画像は、階調特性変更回路16に入力され、階調特性の変更処理が行われる。階調特性の変更処理が行われる実際の処理領域は、デフォルトの処理領域中における輝度値が閾値以上となる画素数N1と以下となる画素数N2との比N1/N2が基準範囲内となるように、デフォルトの処理領域における横方向のサイズ等が増減して、被写体画像の輝度分布に応じて可変設定される。
(もっと読む)
41 - 60 / 124
[ Back to top ]