
Fターム[3B150NA22]の内容
Fターム[3B150NA22]の下位に属するFターム
布枠に関する信号 (271)
Fターム[3B150NA22]に分類される特許
1 - 20 / 29
テープ縫い付け方法及び装置、身頃セット方法及び装置
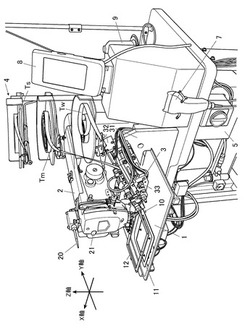
【課題】靴の身頃にテープを斜めに縫い付ける場合において、靴のサイズのみをバーコードで読み取ってテープ幅を選択してから、身頃の左右及び内外の区別に対応してテープを縫い付けでき、小ロット生産を可能にする。
【解決手段】靴のサイズのみをバーコードで読み取ってテープ幅を選択し、その選択された幅のテープTをテープ供給装置3にセットする。そして、テーブル1にセットされた身頃の左右及び内外の区別を身頃センサで判別し、その判別された身頃に対応するテープ長さ、縫製パターンを選択して、その選択された長さのテープTをテープ供給装置3により身頃に供給するとともに、選択された縫製パターンに基づいてミシン2により身頃にテープTを縫い付ける。
(もっと読む)
玉縁縫いミシン

【課題】布地の切断動作を安定して行う。
【解決手段】ミシンモータを駆動源とする針上下動機構と、送りモータを駆動源とする布送り機構と、固定メスに対してメスモータによりセンターメスを上下動させて直線切れ目を形成するメス機構と、被縫製物の搬送速度に応じて定まるセンターメスの上下動頻度に従ってメスモータを制御する動作制御手段とを備え、メスモータの動作速度を検出する検出手段を備え、動作制御手段が、メスモータの指令値に対して検出手段の検出する動作速度が規定値以上の低下を生じた場合に、ミシンモータ及び送りモータを減速させる制御を行うことを特徴とする。
(もっと読む)
打刻データ作成装置及び打刻データ作成プログラム
【課題】刺繍縫製可能なミシンを用いてシート状の被加工物に対する小孔形成動作を実行するための打刻データを作成するものにあって、被加工物に対する所定の模様の描画及び/又は模様の輪郭に沿った被加工物の切断を可能とする打刻データを作成することができ、しかも、模様の描画を行う際の被加工物の破れや、模様の輪郭形状を切断する際の未切断部の発生を効果的に防止する。
【解決手段】針棒ケース7の特定の一部の針棒8に、縫針9に代えて打刻針を装着可能とする。移送機構18のキャリッジ19に、シート状の被加工物を保持する保持体を取付可能とする。制御回路は、打刻データに基づいて、被加工物に対する小孔形成動作を実行させる制御を行う。制御回路は、被加工物に対し複数の小孔により所定の模様を描画するための描画データ、被加工物に対し模様の輪郭に沿って複数の小孔を連続的に形成することにより輪郭を切断するためのカットデータを作成し、更にそれらデータを補正する。
(もっと読む)
ミシン
【課題】刺繍枠の移動手段の座標系と、撮像手段の座標系との対応が的確にとれたミシンを提供すること。
【解決手段】被加工物を保持部材に保持させた状態で、パラメータ算出処理が実行される。パラメータ算出処理では、加工データが取得される(S10)。加工データに従って、保持部材が移動され(S30)、保持部材に保持された被加工物に複数の特徴点が形成される(S40)。複数の特徴点が形成された被加工物が撮像される(S70)。被加工物の画像から、複数の特徴点が抽出され、特徴点座標が算出される(S80)。S85で取得された基準座標と、特徴点座標とが対応付けられる(S90)。対応付けの結果に基づいて、移動手段の座標系と撮像手段の座標系とを対応づけるパラメータが算出される(S100)。
(もっと読む)
ベルトループ付けミシン
【課題】適正なベルトループの縫着を行う。
【解決手段】針上下動機構と、ループクランプ31と、ループ押さえ52と、載置台51と、布押さえ71と、第一の移動機構50と、第二の移動機構70と、クランプ移動機構30と、単一のフォーク部材38とを備え、第二の移動機構の駆動源を布送りモータ74とし、ループクランプが挟持するベルトループBの幅方向に折り目となる折り目縫い目L2を形成し、当該折り目縫い目から折り返される方向にクランプ移動機構によりループクランプを移動させ、折り返されたベルトループにより隠れた状態となる折り目縫い目の上から重ね縫い目L3を形成する重ね縫い目形成制御と、重ね縫い目形成制御の実行の際に、第二の移動機構の布送りモータを制御して設定補正量に応じて折り目縫い目に対して重ね縫い目の形成位置を補正する制御を行う重ね縫い目位置補正制御とを行う制御手段80を備えている。
(もっと読む)
布搬送装置
【課題】被縫製物のズレを回避しつつ円滑な縫製及び搬送を行う。
【解決手段】被縫製物Cを保持する保持機構310と、保持機構を介して被縫製物を搬送する移動機構330とを備え、複数のボタン穴かがり縫いを搬送方向に沿って行うために、ボタン穴かがりミシン200に対して被縫製物を搬送する布搬送装置300において、保持機構は、被縫製物を載置する載置板311と、載置板のミシン側端縁部からミシン側に延出されると共に上側に折り返してなる支持腕320と、支持腕によって支持されると共に載置板上の被縫製物を上方から押圧保持する複数の保持部材314とを備え、載置板のミシン側端縁部に対向する対向面352を有する被縫製物の位置決め部材351と、当該位置決め部材を移動機構による支持腕の移動範囲から退避移動させる退避手段354とを有する位置決め機構350を備えている。
(もっと読む)
ミシンの布押さえ昇降装置
【課題】電源遮断時の布押さえ高さの固定状態を解消する。
【解決手段】布押さえ5を昇降するエアシリンダ4と、空気圧供給源20からエアシリンダの各空気室4U,4Dへ空気圧を供給する第一の電磁弁10と、布押さえを操作する操作入力手段30と、第一の電磁弁を制御して布押さえの高さを切り換え、下降時間の長さにより布押さえを中間停止させる制御手段40と、エアシリンダの各空気室に設けられた予備排気経路71,72と、各予備排気経路に設けられた逆止弁73aと、各逆止弁に空気圧を供給する閉塞圧供給経路74と、各逆止弁の排気側に対する空気圧供給状態と大気解放状態とを切り換え可能な第二の電磁弁75と、主電源の通電時には空気圧供給状態とし、主電源の切断時には大気解放状態に第二の電磁弁を切り替える押さえ解放制御回路77を備えている。
(もっと読む)
ベルトループ縫いミシン
【課題】 縫製物本体が浮き上がった状態で押さえに押さえられることを防止して、ループ材を縫製物本体にきれいに縫い付けることにより、ベルトループの品質の向上を図る。
【解決手段】 制御手段は、ループ材20の一端部20aがZ字状に折曲される形状のベルトループを形成する場合において、1番目の縫製部分である一端部20aを縫い付け、挟持手段3がミシン2の縫製位置を通過して一端部20aがU字状に折曲されるように挟持手段3を移動した後であって、2番目の縫製部分である一端部20aの近傍を縫い付ける前に、挟持手段3を縫製位置に近づく方向に移動する制御を行う。
(もっと読む)
ループ材供給装置
【課題】 ミシンの布送り動作時にループ材における縫製物本体に縫い付けられた部分と挟持手段に挟持された部分との間においてねじれが発生してしまうことを防止し、これにより、ミシンによって形状が均一で高品質にベルトループを縫い付ける。
【解決手段】 制御手段17は、縫製物本体21およびループ材20がミシン2の押さえ23によって押さえられた後であって、ミシン2が縫製物本体21を縫い形状に合わせて搬送しながらループ材20を縫製物本体21に縫い付ける前に、ループ材20における挟持手段3による挟持部分と押さえ23による押さえ部分との間が緩む方向に挟持手段3を移動するように、Y方向移動手段12やZ方向移動手段13の駆動を制御する。
(もっと読む)
ループ材供給装置
【課題】 1台のループ材供給装置でベルトループ形状の変更に柔軟に対応することができ、種々のベルトループ形状を形成する。
【解決手段】
回転駆動機構(2つのロータリーアクチュエータ)26は、フォーク部材25を回転方向の基準となる初期位置から正逆方向に回転可能とし、制御手段17は、ループ材20の両端部20a、20bU字状に折り曲げられた形状によって縫製物本体21に縫い付ける場合に、ループ材20の一端20aを折り曲げる際には、フォーク部材25を初期位置から正逆方向のいずれか一方向に回転させ、ループ材20の他端部20bを折り曲げる際には、フォーク部材25を初期位置から正逆方向の他方向に回転させる。
(もっと読む)
ボタン穴かがり縫いミシン
【課題】被縫製物の厚さに合わせて適切な切断圧力で被縫製物を切断すること。
【解決手段】メス30とメス受け50とを有し、これらによって被縫製物Cにボタン穴を形成するボタン穴かがり縫いミシン1は、メス又はメス受けを原点位置と切断終了位置との間で往復移動させるパルスモータと、パルスモータの駆動を制御する制御手段と、パルスモータの実際の回転パルスを検出するエンコーダと、制御手段からパルスモータに出力される駆動パルスと、エンコーダで検出されたパルスモータの実際の検出パルスとの位置偏差を算出する位置偏差算出手段と、駆動パルスと実際の検出パルスとの許容限界を記憶する偏差記憶手段と、を備え、制御手段は、偏差算出手段により算出された偏差が許容限界を超えた場合に、メス又はメス受けが切断終了位置に到達するまでの間、位置偏差が減少するように駆動パルスを補正してパルスモータに出力する。
(もっと読む)
ミシン
【課題】設定縫い速度での各アクチュエータの動作確認を可能とする。
【解決手段】ミシンモータ2aにより針上下動を行う針上下動機構と、位置決めモータ76a,77aにより布移動を行う位置決め機構と、縫製に関係する動作を実行するアクチュエータ42,79a,80a,81aと、縫製データ71aに基づいてミシンモータ、位置決めモータ及びアクチュエータの動作制御を行う動作制御手段1000とを備えるミシンにおいて、縫製データに定められた縫い速度に従って回転するミシンモータ又はこれにより駆動される主軸の回転同期信号を仮想的に再現し、ミシンモータを駆動させることなく、仮想的な回転同期信号に同期しながら前記縫製データに基づく位置決め機構及びアクチュエータの動作を実行させる確認動作制御手段1000を備えている。
(もっと読む)
テープ縫付け装置
【課題】幅継ぎ線を中心に左右対称の位置にテープを縫い付ける場合でも、カーテン生地を180度回転させてテーブルにセットし直すような手間のかかる作業を必要としないテープ縫付け装置を提供する。
【解決手段】生地をX方向に広げた状態に載置可能なテーブル(10)と、このテーブル10上に載置された生地をY方向へ送る布送り手段(40,50)と、前記生地にテープを縫い合わせる縫製ヘッド(20)と、この縫製ヘッドを前記テーブル上の所定位置でX方向に移動させるヘッド搬送手段(30,31,32)とを備え、布送り手段(40,50)は、テーブル上の生地をY方向における順方向と逆方向とに設定長送ることが可能なように構成されている。
(もっと読む)
玉縁縫いミシン
【課題】一方の側縁部が延出されたフラップ布に対して正しく縫着を行うことを可能とする。
【解決手段】両縫い針と片針駆動を切り替える針上下動機構70と、左右一対の大押さえ41A,41Bと、フラップ布Fを保持するフラップ保持機構55と、大押さえを移送する布送り機構40と、各大押さえ上の端部検出用の反射部41c,41dと、各反射部からの反射光を受光するフラップセンサ30、35と、フラップセンサによりフラップ端部を検出し、大押さえ41A,41Bの縫い開始対応位置を各針ごとに算出する縫い開始位置算出手段61とを備え、縫い開始対応位置の算出時点での大押さえ41A,41Bの位置が、いずれかの縫い開始対応位置を通過している場合に、通過距離以上の長さの逆送りを行って縫いを開始する逆送り制御手段61を有している。
(もっと読む)
根巻きボタン付けミシン
【課題】ボタンが縫いつけられた布地に損傷を与えることなく、ボタンが損傷してしまうのを防止するとともに、縫い糸の切断不良の発生を防止する。
【解決手段】駆動制御手段91は、根巻き縫い終了後、ボタン挟持部25を、ボタン13を垂直状態から水平状態に回動させながら、ボタン13を解放するように、ボタン回動機構16bおよびボタン挟持部開閉機構16aを制御するとともに、タング66を下降位置に移動させるようにタング上下動機構83を制御する。
(もっと読む)
根巻きボタン付けミシン
【課題】ボタンが縫いつけられた布地に損傷を与えることなく、ボタンが損傷してしまうのを防止するとともに、縫い糸の切断不良の発生を防止する。
【解決手段】駆動制御手段は、根巻き縫い終了後、布地の下降位置への移動の際に、ボタン挟持部を挟持位置に位置させたまま、ボタン挟持部によるボタンの挟持力を、根糸を介してボタンが下方に引かれることによりボタンがボタン挟持部から離脱な可能な程度に低減させる挟持力低減手段を備える。
(もっと読む)
ボタン縫い付け方法及びそのミシン
【課題】 ボタン付け姿勢から根巻き姿勢への切替え時に生じるボタン付け糸の歪みを簡単かつ合理的に矯正して見栄え及び風合いの良い仕上がりが得られるボタン縫い付け方法及びボタン付けミシンを提供する。
【解決手段】 ボタン付け作用(工程)が完了した後で、根巻き縫い作用への移行前の段階で、ボタンホルダー5及びこれに保持されているボタン6を生地ホルダー10に対して上昇移動並びに下降移動させることにより、ボタン付け糸RN,LNに生じている弛みによる歪みを矯正し、しかる後、根巻き縫い作用を行うようにしている。
(もっと読む)
ミシン
【課題】多段式の操作ペダルの操作手法をユーザの好みによって切り替えることができるミシンを実現する。
【解決手段】玉縁縫いミシン10において、表示入力手段91の表示パネルに表示されるペダル動作モード切替画面における多段式操作選択キー91cと回数式操作選択キー91dの何れかを選択操作することによって、操作ペダル92が踏み込み操作された際の踏み込み量に応じてミシンの各作動装置を作動させる多段式操作モードと、操作ペダル92が踏み込み操作された作動回数に応じてミシンの作動装置を作動させる回数式操作モードとに切り替えて、それぞれの操作モードに対応させて操作ペダル92を操作してミシン10を使用することを可能にした。
(もっと読む)
ボタン付けミシン
【課題】 全体構造が簡単で小型化、軽量化及び低コスト化を図りつつ、柔らかい生地を縫製対象とする場合でも、縫い皺などの発生を防止でき、また、糸の種類や太さに関係なく高い縫製品質のボタン付けを行うことができるボタン付けミシンを提供する。
【解決手段】 ボタン付け縫製時に、生地ホルダー10を所定位置に固定保持して該生地ホルダー10の左右X−X方向への移動を停止する状態と、生地ホルダー10の位置固定を解除して該生地ホルダー10をボタンホルダー5と共に可動テーブル22を介して前後Y−Y方向・左右X−X方向に移動させる状態とに切換え可能な生地ホルダーの可動・不動切換機構を設け、この切換機構中に、生地ホルダーの固定保持位置を左右方向に一定範囲内で調整可能な位置調整機構41が組み込まれている。
(もっと読む)
ミシン
【課題】縫いに要する各種作業の順序の選択を自在且つ容易に行う。
【解決手段】 縫製に要する各種の作業を実行する複数の作動装置14,16,18,22,26,32,36,42,44,52,56と、各種の作業を複数の工程に分けて当該各工程を順番に実行するミシンにおいて、入力操作により各工程の実行を指令する指令信号を順次発生する操作手段92と、各種の作業を各工程に割り当てる設定手段91と、各作業が割り当てられた工程を操作手段により順次発生される指令信号に従って順番に実行されるように各作動装置の動作制御を行う動作制御手段60とを備えている。
(もっと読む)
1 - 20 / 29
[ Back to top ]