
Fターム[3C007BS06]の内容
マニピュレータ、ロボット (46,145) | マニピュレータの種類、タイプ (2,563) | 腕直列配列 (1,746) | 円筒座標型 (36)
Fターム[3C007BS06]に分類される特許
21 - 36 / 36
基板移載ロボット
【課題】基板の位置決めの際に、基板に生じる傷を軽減できる基板移載ロボットを提供すること。
【解決手段】基板が載置されるハンドユニットと、前記ハンドユニット上に載置された前記基板の位置決めを行なう位置決め手段と、を備えた基板移載ロボットにおいて、前記ハンドユニットが、ハンド本体部と、前記ハンド本体部から上方へ突出し、前記基板が載置される複数の載置部材と、を備え、各々の前記載置部材は、その上端において回転自在に支持されて自由回転する回転体を有することを特徴とする。
(もっと読む)
基板移載装置,基板処理装置,基板移載用アーム,基板移載方法

【課題】ウエハ保持ボートにおける任意の保持板との間で基板のやり取りを可能としつつ,保持板のピッチを従来以上に狭くする。
【解決手段】基板移載装置300は,旋回及び昇降可能に構成された基台310と,基台に進退可能に設けられ,ウエハを載せて搬送するための搬送フォーク部322を有する第1アーム320と,基台に進退可能に設けられ,起倒可能な基板持ち上げ機構340を設けた持ち上げフォーク部332を有する第2アーム330とを備える。
(もっと読む)
直線移動機構およびこれを用いた搬送ロボット
【課題】 正確な直線移動行程を実現しつつ、構造の簡略化を図ることができる直線移動機構、およびこれを用いた搬送ロボット、さらには真空環境下での使用に適した当該搬送ロボットを提供する。
【解決手段】 本発明に係る直線移動機構B1は、ガイド部材1と、このガイド部材1上に設定された水平直線状の移動行程GLに沿って移動可能な2つの移動部材と、駆動プーリ31b、およびこの駆動プーリ31bに掛け回されて移動行程GLの平行線に沿う所定の往復動区間3Aa,3Bbを往復動する出力ベルト33を含んで構成された駆動機構3A,3Bと、駆動プーリ31bを駆動するためのモータM3,M4とを備え、移動部材は、連結部材24a,24bによって駆動機構3A,3Bの出力ベルト33にそれぞれ連結されており、駆動機構3A,3BおよびモータM3,M4は、それぞれガイド部材1に支持されている。
(もっと読む)
防塵機構を備えた基板搬送装置
【課題】防塵効果が高く、アーム部が複数になっても対応できる防塵機構を提供すること
【解決手段】基板を搭載するアーム部を支持するとともに、支柱9外面に設けられた直線状の開口部12を介して支柱9内に設けられた案内機構22へと接続されて、案内機構22に従って、開口部12の開口を移動する支持部材4と、開口部12を封じて、支柱9内部と外部とを隔離するシールベルト5と、を備え、案内機構22によって支持部材が移動しても、シールベルト5によって支柱の内部が外部に露出しないよう構成された基板搬送装置において、シールベルト5が、その両端を支柱内部に固定されるとともに、支持部材4に回転可能に支持されたローラに巻装されて、開口部12を封じるようにした。
(もっと読む)
ロボット装置
【課題】教示作業が容易であり、且つ実動作でのタクトタイムを短縮できるロボット装置を提供する。
【解決手段】ワークを保持するワーク保持部10を有して往復運動する第1アーム11、その第1アーム11を連結して第1アーム11と同じ方向に往復運動する第2アーム12とで少なくとも構成されたアーム部2、及び、第1アーム11の動作を第2アーム12に優先して制御して、アーム部2を始点座標P0から所定の座標位置Pまで移動させる制御装置を備えたロボット装置1により、上記課題を解決した。前記の制御装置は、ロボット座標系としてR軸を設け、始点座標P0から所定の座標位置Pまでの距離RをR=R1+R2(R1は第1アーム11の移動距離であり、R2は第2アーム12の移動距離である。)の順機構解を定義し、RからR1,R2への割付を逆機構解として定義することが好ましい。
(もっと読む)
医療ロボットシステム
医療器具、特に腹腔鏡手術器具(18)をロボット補助により取り扱うロボットマニピュレータ(14)を備える医療処置を実施するための医療ロボットシステム(10)。ロボットマニピュレータ14は、基部(24)、前記基部によって支持される垂直部分(27)、及び前記垂直部分(27)によって支持されるほぼ水平な部分(29)を備えるマニピュレータアーム(26)、前記マニピュレータアーム(26)によって支持されるマニピュレータリスト(28)、及び前記マニピュレータリストによって支持され、かつ医療器具を保持するように形状化されたエフェクタ装置(30)から構成される。マニピュレータアーム(26)にはマニピュレータリストを定位させるための円筒形PRP運動構成が与えられる。より詳細には、PRP運動構成には、ジョイントが下記順序、すなわち、ほぼ垂直な軸に沿った移行自由度を与えることによって垂直部分(27)の高さを変えるプリズム型(P)第一ジョイント、ほぼ垂直な軸を中心とした回転自由度を与えることによって垂直部分(27)と水平部分(29)との間の回転角を変える回転型(R)第二ジョイント、及びほぼ水平な軸に沿った移行自由度を与えることにより水平部分の到達範囲を変えるプリズム型(P)第三ジョイントの順で配置される。
 (もっと読む)
(もっと読む)
基板搬送装置
【課題】 半導体や液晶パネルの製造工程における基板搬送を簡易な構造で、迅速かつ高精度で行えるようにする。
【解決手段】 第1スライダ20と第2スライダ30とが同期をとって伸長するリニアスライダ10が収容される際、第1スライダ10はベースハウジング11内に完全に収容され、第2スライダ30は収容状態の第1スライダ20上まで縮退する。一方、第1スライダ10は、ベースハウジング11内に設けられた1対のプーリ間に掛け渡されたベルトBの一部に固定された保持プレート22によって、ベルトBの走行方向に移動して伸縮するとともに、第2スライダ30は、両端部がベースハウジング11内の保持プレート22に軸支された1対の従動プーリ23,24ととの間に掛け渡されたワイヤ18の一部に固定された部位を介して第1スライダ20の伸縮と同期してスライドする。
(もっと読む)
多関節ロボット
【課題】 各種用途に臨機応変に適応できるようにして汎用性を高める。
【解決手段】 位置が固定されるベース部6と、このベース部6を支点として旋回アーム7の一端7s側を水平方向に回転させる水平回転機構8と、この旋回アーム7の他端7t側から起立し、かつ支持部9をZ軸方向へ移動させるZ軸移動機構10と、前アーム部3と後アーム部4を回動軸部11を介して連結したアーム機構5を有し、このアーム機構5の後端5r側を装着位置の変更可能な着脱部12を介して支持部9に装着するとともに、アーム機構5の後端5r側を回転させることにより、アーム機構5の先端5fに支持するチャック部2をX軸方向に移動させるX軸移動機構13を具備する。
(もっと読む)
小型移載機
【課題】直動する距離以外の移動体の長さや余裕長さが不要であり且つ静粛性に優れた小型移載機を提供すること。
【解決手段】水平方向の進退動作と、水平面内での旋回動作が可能なロボットハンド130を有する小型移載機において、前記ロボットハンドは、駆動アーム160の揺動によって、水平方向の進退動作が行われ、回転テーブル110下側に前記回転テーブルと同軸上に水平駆動用モータ150と干渉しない位置に固設された半円強の旋回用ギヤ170と、旋回駆動用モータ190の回転軸に固設された駆動用ギヤ180との噛み合いにより水平面内での旋回動作が行われる構成としたことにより、上記課題を解決する。
(もっと読む)
直線移動機構およびこれを用いた搬送ロボット
【課題】 簡単な構成により、より正確な直線移動行程を実現できる直線移動機構およびこれを用いた搬送ロボット、さらにはハンドを2つ備えることによってワークの搬送効率を高めた搬送ロボットを提供する。
【解決手段】 ガイド部材1と、このガイド部材1上に設定された水平直線状の移動行程に沿って移動可能な移動部2A,2B材と、これら移動部材2A,2Bを駆動する駆動機構3A,3Bと、を備えた直線移動機構B1であって、駆動機構3Aは、移動行程GLを挟んで配置され、かつ同期駆動される一対の往復動機構を含んでおり、移動部材2Aは、移動行程を挟んで離間する一対の連結部材24aにおいて、上記一対の往復動機構に連結されている。
(もっと読む)
ロボットステーション
【課題】 ワークを搬送するアームおよびハンド部の動作範囲に死角が生じないようにし、全方位に等しくワークを送り出し尚かつどの方位の作業ステーションからもワークを受け取ることができるようにする。
【解決手段】 ロボット移動ステーション1を中心として各作業ステーション2がワーク10に対し組立・加工・洗浄等の各工程が行われる各作業ステーション2にワーク10を送り出しあるいは各作業ステーション2からワーク10を受け取り又はワーク10に対して作業を行う産業用ロボットMを載置する回転テーブル5と、回転テーブル5の中央に配置され、これと一体となって回転可能な回転軸3と、回転軸3近傍に配置した回転軸3を回転させる回転軸用駆動装置4とを備え、回転テーブル5を中心として各作業ステーション2がその周囲に配置されるとともに、産業用ロボットMは、回転テーブル5とは独立の駆動ユニットとなっている。
(もっと読む)
真空用搬送ロボットおよびそのアーム構造体
【課題】 干渉領域が小さい真空用搬送ロボットおよびそのアーム構造体を提供することである。
【解決手段】 アーム用回転モータ80によって、ベース体43に対して第1アーム部材110を変位駆動するとともに、第1アーム部材110に対して第2アーム部材111を連動して変位駆動する。したがってベース体43から移動方向Xに予め離れた位置へ半導体ウェハ32を搬送する場合、1つのアーム部材で搬送する場合に比べて、各アーム部材110,111の長さを短くすることができる。これによって各アーム部材110,111を縮退させた状態では、1つのアーム部材を用いる場合に比べて、旋回半径を小さくすることができる。さらにアーム用回転モータ80を非真空領域に配置することによって、搬送ロボット30を安価に実現することができる。
(もっと読む)
基板移送装置
【課題】基板を安定して移送することができ、基板の収納状態も感知することができる 基板移送装置を提供すること。
【解決手段】基板移送装置はハンド130a、130bがピックアップ位置から溝の位置に戻った時、ハンド130a、130bのポケット部132に配置された基板Wを把持する把持部材140を含む。この把持部材140は基板Wのエッジと面接触する湾曲部144aを有し、そして少なくとも一つのハンド130a、130bの移動方向と同一の方向に移動可能に前記ベース上に設けられるプッシャー144及びプッシャー144が基板Wのエッジを側方に押すように弾性力を加える弾性体146を含み得る。
(もっと読む)
ロールハンドリング装置
【課題】被製版ロールや印刷ロールを挟持して昇降自在・垂直面内に往復旋回自在・垂直面内に往復旋回自在・搬送自在であることにより、他の装置との間でまたは他の場所へ被製版ロールの受渡しを行える、ロールハンドリング装置。
【解決手段】走行台車装置に装着された旋回台に、昇降台装置を備えた支柱が立設され、昇降台に装着された垂直旋回台に基端を水平アームが固定され、水平アームには水平アームと一体に旋回する一対の挟持アームが互いに接近移動・離隔移動自在に設けられ、一対の挟持アームに一対のロール挟持具を備えている。被製版ロールを、一対のロール挟持具によりロールの面長方向中央部を挟持中心として挟持して昇降自在・垂直面内に往復旋回自在・垂直面内に往復旋回自在・搬送自在であることにより、他の装置との間でまたは他の場所へ被製版ロールの受渡しを行う。
(もっと読む)
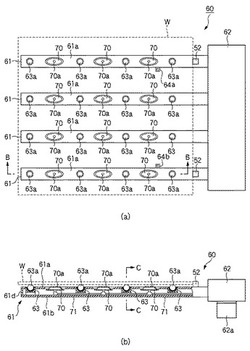
基板搬送装置
【課題】 本発明は搬送構造を改善した基板搬送装置を提供する。
【解決手段】 本発明による基板搬送装置は、ベース部20と;ベース部20上に直線運動ができるように設置されて、回転体32が備わっている運動部30と;運動部30の両側に並立設置されて、高さ調節が可能な一対のフレーム部40a、40bと;一対のフレーム部40a、40bの間に連結されて、フレーム部40の高さ調節動作に連動して、上下直線運動する搬送部50と;を含んで構成される。これにより、構造的な安全性を確保した状態で、簡便で精密に基板、特に大型基板を搬送させることが可能になる。
(もっと読む)
移載機
【課題】リンク機構のみで、大きなストロークを確保して大型のガラス板でも、ストッカーなどと干渉することなく、高速で移載できるようにした移載機を提供すること。
【解決手段】先端に搬器4を取り付けた2本一対の搬器支持リンク2と、先端側に搬器支持リンク2を枢着したX字形の主リンク1と、主リンク1の基端側と枢着し、基端側の駆動軸Pにて揺動可能とした2本一対の揺動リンク3とよりなり、揺動リンク3の揺動にて前記リンク機構の屈伸作用で、姿勢を制御しつつ、直線の移載方向の運行軌跡に沿って搬器4を移動するように構成する。
(もっと読む)
21 - 36 / 36
[ Back to top ]