
Fターム[3C007BS29]の内容
マニピュレータ、ロボット (46,145) | マニピュレータの種類、タイプ (2,563) | マニュアルマニピュレータ (63)
Fターム[3C007BS29]に分類される特許
1 - 20 / 63
配線基板搬送用治具、配線基板の製造方法
【課題】吸引時の配線基板の姿勢を安定させることにより、配線基板への吸引部の接触を確実に防止することができる配線基板搬送用治具を提供すること。
【解決手段】本発明の配線基板搬送用治具11は吸引部20を備える。吸引部20には、凹部の内周面にて開口するエア吹出穴が設けられる。また、配線基板搬送用治具11には、エア吹出穴にエアを供給するエア流路221が設けられ、エア流路221上には、作業者によって操作されるスイッチ部51が設けられる。スイッチ部51には、エア流路221が延びる方向とは直交する方向に長い断面形状を有する貫通孔61が設けられる。なお、貫通孔61がエア流路221と連通しない操作位置であれば、エア流路221を閉鎖する閉鎖状態となり、貫通孔61がエア流路221と連通する操作位置であれば、エア流路221を開放する開放状態となる。
(もっと読む)
作業用器具

【課題】先端部において回動支持される工具を、手元の操作によって所望の角度位置で固定して、所要の作業を確実に行えるようにする。
【解決手段】筒状の操作棒2と、該操作棒2の先端部2aに同一軸線上に配置されるとともに、作業に使用される工具6が直接又は間接的に接続される接続体3と、操作棒2の先端部2bおよび接続体3の基端部3aが互いに離間する方向に付勢された状態で、操作棒2および接続体3を相対回動自在に連結する連結部4と、相対回動する操作棒2および接続体3を所望の角度位置で固定する位置固定操作、該位置固定を解除する解除操作が手元で行えるように構成される操作機構部5とを備える。
(もっと読む)
医療用マニピュレータ
【課題】マニピュレータを電気メスとして使用する場合であっても、先端動作部での通電経路を適切に確保して、その動作や手技を円滑に行うことができる医療用マニピュレータを提供する。
【解決手段】マニピュレータ10は、ワイヤ80bの進退駆動によって従動回転される歯車体126等により、少なくとも軸線方向を中心とするロール方向への回転動作が可能な先端動作部12を備える。先端動作部12は、高周波電源23から、第1通電経路E1及び第2通電経路E2を介してそれぞれ通電されることにより、その間で生体に通電可能な一対のグリッパ部材308、309を有する。先端動作部12における第1通電経路E1及び第2通電経路E2は、ロール方向へと先端支持部材161と共に回転可能なスリップリングR1、R2を含む第1構造部S1と、第1構造部S1より基端側に設けられて通電ピンP1、P2を有し、ロール方向には回転しない基端部材402を含む第2構造部S2とを備える。
(もっと読む)
間接活線把持工具
【課題】 把持部にて種々の断面サイズを有する被把持物を把持できる間接活線把持工具を提供する。
【解決手段】 本発明は、把持部の可動把持片および固定把持片において、これらの少なくとも湾曲内面に弾性部材を配し、前記可動把持片を前記固定把持片に接近させて被把持物を把持する場合に、前記各把持片の互いに対向する湾曲内面と当該被把持物との間に当該弾性部材が介在し、これによって当該被把持物が支持固定されるようにした間接活線把持工具に関する。前記弾性部材は、さらに前記各把持片の把持面をそれぞれ被覆する被覆部を備えることができる。前記弾性部材は、前記各被覆部と、その間を連結する連結体部とで形成でき、また前記各把持片を互いに接近させた場合に、これらの湾曲内面によって形成される開口空間を充填、密閉するように形成してもよい。
(もっと読む)
真空ピンセット及び真空吸着方法
【課題】反りがある半導体ウエハに対して、安定して吸着することができ、かつ、半導体ウエハを平らに矯正することができる真空ピンセット。
【解決手段】本体2と、本体2の端部に設けられた支持部3と、一端が支持部3に接続され、他端に吸着部5を備えた複数の先端部材4と、を少なくとも備え、先端部材4と支持部3と本体部2の内部に吸引流路10a〜10cが設けられた、反りを有する平板状の被処理体用Wの真空ピンセット1Aであって、複数の先端部材4は、反りの形状に合わせるように、及び、反りを矯正するように、支持部3に対して可動であることを特徴とする真空ピンセット1A。
(もっと読む)
ICタグホルダー着脱装置、ICタグホルダーの装着方法ならびにICタグホルダーの取り外し方法
【課題】ICタグを装着したICタグホルダーを管体に着脱するICタグホルダー着脱装置を提供する。
【解決手段】複数の支持脚4を有し、該複数の支持脚4が開脚しようとする弾性力により管体内部に定着されるICタグホルダー3を固定可能な保持具8を先端に有するアーム7と、該保持具8によるICタグホルダー3の固定および固定の解除を操作する保持具操作手段と、前記アーム7に対して摺動可能、かつ、前記管体に挿入可能に設けられた筒状体5とを有し、該筒状体5のアーム7に対する摺動により、前記保持具8で固定したICタグホルダー3の支持脚4を前記筒状体5へ出し入れして、該支持脚4の開閉を可能としたことを特徴とするICタグホルダー3の着脱装置。
(もっと読む)
真空ピンセット
【課題】反りがある半導体ウエハに対して、安定して吸着することができる真空ピンセット。
【解決手段】長尺状の本体2と、この本体2の端部に設けられ、複数の吸着面4〜6を有する吸着部3と、吸着面4〜6毎に少なくとも一つ設けられ、被処理体を吸着する吸着孔7と、を備え、少なくとも一つの吸着面は、一辺に屈曲部11を有し、被処理体に対して吸着孔7が接近又は離間するように、屈曲部11を中心に回動可能に構成されていることを特徴とする真空ピンセット1を提供する。
(もっと読む)
真空ピンセット
【課題】反りがある半導体ウエハに対して、安定して吸着することができる真空ピンセット。
【解決手段】長尺状の本体2と、本体2の端部に設けられ、平坦部を有する先端部3と、先端部3の平坦部3aに設けられた複数の突部4と、を備え、突部4のうち少なくとも1つが、可撓性を有する材料からなる吸着部4であることを特徴とする真空ピンセット1を提供する。
(もっと読む)
空間の任意の位置に自在に可動するアームで道工具箱や被加工物を定置する自在アーム。
【課題】空間の任意の位置に動工具箱や被加工物を定置する場合架台の上に定置するか吊り下げて定置していた、この方法では架台や吊り具が周辺に位置を占め干渉していた、
【解決手段】空間の任意の位置に物を横方向から定置するためにはアームが旋回と上下に自在に屈曲可動して固定し、十分な強度と耐久性を有すること、旋回する梁と旋回上下する棹その先に回転可能な定置受け台からなり、定置受け台は前記の梁と棹の旋回上下の動きに関係なく常に平行を保つことを特徴とする自在アームである。
(もっと読む)
遠隔操作用把持工具
【課題】被把持物を把持しながらその遠隔操作棒の軸心方向に対する傾斜角度を容易に調節できる遠隔操作用把持工具を提供する。
【解決手段】遠隔操作棒17の先端に連結されるジョイント部材9を回転自在に保持する工具基台2に、固定側把持腕部3が回動支軸23により回動自在に支持され、固定側把持腕部3に可動側把持腕部4が回動自在に連結され傾斜した押圧ガイド斜面14aを有する押圧部材14を先端に備えた作動部材13がジョイント部材9の回転により工具基台2から可動側把持腕部4に対し接離方向に進退され且つ可動側把持腕部4に設けた受圧部材19の球状の支点部19aが回動支軸23の軸心とほぼ同一面上で押圧ガイド斜面14a上に当接され、固定側把持腕部3を手動操作で回動支軸23回りに回動したときに支点部19aが押圧ガイド斜面14a上で転動する状態で支点部19aを支点に可動側把持腕部4を回動させる角度調節機構15を備えている。
(もっと読む)
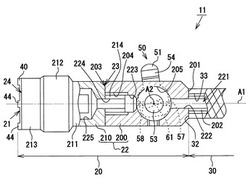
遠隔操作型アクチュエータ
【課題】 細長いパイプ部の先端に設けられた工具の姿勢を遠隔操作で変更することができ、その工具の姿勢変更を手元操作で容易に行える遠隔操作型アクチュエータを提供する。
【解決手段】 細長形状のスピンドルガイド部3と、その先端に姿勢変更自在に取付けられた先端部材2と、スピンドルガイド部3の基端が結合され手により保持可能な駆動部ハウジング4aとを備える。先端部材2は、工具1を保持するスピンドル13を回転自在に支持する。スピンドルガイド部3は、スピンドル13に回転を伝達する回転軸22と、ガイド孔30a内を進退して先端部材2の姿勢を変更させる姿勢操作部材31とを有する。姿勢操作部材31は、姿勢変更用駆動源で進退させる。この姿勢変更用駆動源に動作指令信号を出す姿勢変更操作具53を、駆動部ハウジング4aの外部に設ける。姿勢変更操作具53は、駆動部ハウジング4aを保持する手で入力操作可能とする。
(もっと読む)
取り寄せ具
【課題】遠方の物品を俊敏にキャッチし取り寄せる、長尺になる取り寄せ具を提供する。
【解決手段】ハンド保持具1にレール収納体3が設けられ、該レール収納体3にはこれから前方に繰り出される伸縮レール4が設けられ、該伸縮レール4に、とってこいスライダー5が設けられ、該とってこいスライダー5に吊下連結材6を介してキャッチ7が設けられている。また後方のスライダーにはスプーン形状のキャッチが設けられている。さらに先端具42付近に、先端つまみ具片44が設けられ、キャッチした物品を手元に移動しうる構成とする。
(もっと読む)
遠隔操作用作業器具
【課題】簡単な構成で主操作棒に撓みが発生するのを効果的、且つ確実に防止できる遠隔操作用作業器具を提供する。
【解決手段】固定具4と回動具5とが支持回動軸19を介して回動可能に結合された先端作業工具3と、先端部に固定具4が連結された主操作棒1と、支持回動軸19より突出した回動具5の受動片5aに先端部が回動可能に連結された補助操作棒2と、主操作棒1に操作用回動軸10を介して回動可能に支持され、操作用回動軸10より受動片5aと同一方向に突出した作動片7aに補助操作棒2の基端部が回動可能に連結されて、梃子の作用で補助操作棒2を移動させて可動具5を固定具4に対し接離する方向に回動させる操作ハンドル7と、主操作棒1と補助操作棒2の間に配置されて、一端部が主操作棒1に固定され、且つ他端部が補助操作棒2に対し移動可能に連結または保持されて主操作棒1と補助操作棒2とを略一定の間隔に保って連結する連結保持具6と、を備えている。
(もっと読む)
動作補助具
【課題】簡単な構造で伸縮自在な帯体を有し、必要なときは帯体を伸ばして離れた所に位置する物体を容易に取ることができ、不要なときは小形化して携帯することができる動作補助具を提供する。
【解決手段】第一第二の帯体26,34の先端部に取り付けられた取付部材28と、取付部材28に着脱可能に連結された付け替え可能な作業部材29を備える。ケース12は、第一帯体26を巻き回した第一回転ドラム24を収容した第一収容部14と、第一収容部14から第一帯体26を外側に引き出す第一開口部18を備える。さらにケース12は、第二帯体34を巻き回した第二回転ドラム32を収容した第二収容部16と、第二収容部16から第二帯体34を外側に引き出す第二開口部20を備える。第一開口部18と第二開口部20は、同方向に向かって開口している。
(もっと読む)
半導体ウエハ用真空ピンセット
【課題】半導体ウエハを安定してハンドリングでき、接触等による半導体ウエハのスクラッチや欠けを防止することができる半導体ウエハ用真空ピンセットを提供する。
【解決手段】ハンドグリップ部と、中心角が180度超360度未満の開環形状の吸着板、及び前記吸着板に配設される吸着口及び前記複数の吸着口を接続する第1真空吸引経路を有する吸着部と、角度調整機構を有し、前記ハンドグリップ部と前記吸着部とを接続する接続部と、一端が前記第1真空経路に接続され他端が半導体ウエハを吸着する真空吸引力を生成する真空圧源に接続されて、前記真空圧源の生成した前記真空吸引力を前記吸着口に伝達する第2真空吸引経路と、を有し、前記吸着板は、半導体ウエハの半径をRとした場合に、外周の大きさが0.71Rより大きく0.85R未満であり、且つ内周の大きさが0.5R以上0.61R未満であることを特徴とする半導体ウエハ用真空ピンセット。
(もっと読む)
ハンドマニプレータ
【課題】レバー部材に対する操作を停止させても掴んだ状態を継続し得ること、操作性を維持して気密性を高めること。
【解決手段】ハンドマニプレータに、トリガー状レバー部材302を引くと進出する作動棒303sと、これを進退自在に外装する、周側に貫通孔303pを開口したガイド管303gと、各貫通孔303pに挿入したクラッチボール303bと、クラッチボール303bを挿入した各貫通孔303pに対面させて配した傾斜面303tを有するクサビ面部材303wと、ガイド管303gに後退作用力を付与するバネ手段303dと、ガイド管303gを一時的に進出させる規制解除手段と、で構成する作用伝達軸307の後退動作規制手段303を付設し、支分伝達軸307dの後端と支分外装管308bの内周との間にダイヤフラム314を、ボール孔308bhの外面側に弾性シート313sを配した。
(もっと読む)
操作機構及び該操作機構を備える医療用器具
【課題】指が太い操作者や細い操作者であっても確実に操作することができ、汎用性の高い操作機構及び該操作機構を備える医療用器具を提供する。
【解決手段】マニピュレータのトリガーレバー32は、指を当てて引き方向及び押し方向に操作する操作機構であって、前記引き方向に操作する際に指を当てる引込部101と、前記押し方向に操作する際に指を当てる押出部102とを有する。押出部102は、中心軸に対して偏心した外形を有する軸部材106を備え、該軸部材106が回転され所定の回転位置で停止されることにより、前記引込部101と押出部102との間で指を入れる指入れ部である孔部100の距離Wを変更する。
(もっと読む)
マニピュレータ
【課題】高い自由度が得られ、操作者が先端動作部に加わる外力等をより確実に感知する。
【解決手段】マニピュレータは、進退動作するワイヤ56と、ワイヤ56に両端が接続された受動ワイヤ252と、基端側から順に、アイドルプーリ140、ガイドプーリ142及び進退可能な受動プーリ156と、受動プーリ156に連結されたエンドエフェクタ104とを有する。受動ワイヤ252は、ターミナル250から、アイドルプーリ140の第1の側方を通り、第1の側方と逆の第2の側方に延在して受動プーリ156の第2の側方を通り、該受動プーリ156に巻き掛けられ、該受動プーリ156の第1の側方を通り、アイドルプーリ140の第2の側方を通ってターミナル250に戻る8字の経路で配設されている。受動ワイヤ252は、アイドルプーリ140とガイドプーリ142との間で交差している。
(もっと読む)
マニピュレータシステム
【課題】高い自由度が得られ、操作者が先端動作部に加わる外力等をより確実に感知する。
【解決手段】マニピュレータは、トリガレバー32を含む操作部14と、エンドエフェクタ104、及びエンドエフェクタ104の向きを変えるヨー軸及びロール軸を含む先端動作部12と、操作部14と先端動作部12を連結する連結シャフト48とを有する。操作部14のアクチュエータブロック30にはヨー軸及びロール軸を駆動するモータ40及び41と、トリガレバー32の操作を機械的に伝達して、エンドエフェクタ104を駆動するグリッパ操作量補正部42が設けられている。コントローラ45は、ヨー軸及びロール軸の姿勢角度によるエンドエフェクタ104の干渉量を演算する。グリッパ操作量補正部42は、コントローラ45の作用下に、プッシュロッドを進退させ、干渉量を補償するようにトリガレバー32による操作量を補正する。
(もっと読む)
医療用マニピュレータ
【課題】操作性を一層向上させることが可能な医療用マニピュレータを提供する。
【解決手段】医療用マニピュレータ10は、エンドエフェクタであるグリッパ22を含む先端動作部14と、前記先端動作部14を操作する操作部16と、前記先端動作部14と前記操作部16とを連結する連結部12と、前記先端動作部14の姿勢を変える姿勢変更機構とを備え、前記グリッパ22の動作は、前記操作部を操作者が操作することにより伝達部材を介して機械的に操作される一方、前記姿勢変更機構の動作は、前記操作部16を操作者が操作することにより作動する屈曲用駆動源及び回転用駆動源を介して操作される。
(もっと読む)
1 - 20 / 63
[ Back to top ]