
Fターム[3C007BT06]の内容
マニピュレータ、ロボット (46,145) | 手首のタイプ (749) | 手首軸 (426) | 3軸手首 (135)
Fターム[3C007BT06]の下位に属するFターム
3軸とも回転のもの (10)
2軸回転、1軸旋回のもの (78)
1軸回転、2軸旋回のもの (30)
Fターム[3C007BT06]に分類される特許
1 - 17 / 17
ロボットハンドの制御装置
【課題】簡易な構成で硬さの異なる被接触体に対応することができるロボットハンドの制御装置を提供する。
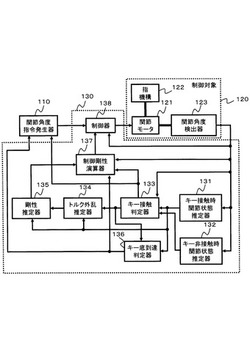
【解決手段】本発明の一形態に係るロボットハンドの制御装置は、指が被接触体に接触した時における関節の状態を推定する接触時関節状態推定器131と、指が被接触体に接触していない時における関節の状態を推定する非接触時関節状態推定器132と、指が被接触体に接触したか否かを判定する接触判定器133と、関節に印加されるトルク外乱を推定するトルク外乱推定器134と、被接触体の剛性を推定する剛性推定器135と、接触判定結果が接触状態の場合、関節の制御剛性を、指が被接触体の押し込み状態を維持できる最小値に演算する制御剛性演算器137と、関節モータ121を制御する制御器138と、を備える。
(もっと読む)
冗長マニピュレータの冗長自由度の決定方法

【課題】冗長マニピュレータ1の手先8をCP制御にて変化させるに際し、アームアングルψの連続性を担保する技術を提供する。
【解決手段】制御装置100は、各ステップにおける手先8の位置及び姿勢状態を取得する状態取得手段20と、各ステップにおける手先8の位置及び姿勢状態に基づいて、各ステップにおけるアームアングルψの実現可能な領域を算出する領域算出手段21と、隣り合うステップ間で領域同士が少なくとも一部重複するように、ステップs0からステップsnに至る間の領域の組み合わせを作成する組み合わせ作成手段22と、領域の組み合わせに基づいて、CP制御の各ステップにおけるアームアングルψを決定する冗長自由度決定手段23と、を備える。
(もっと読む)
ツイストスライド機構及びロボット
【課題】スライド動作の俊敏性を低下させずにツイスト動作の俊敏性を向上させることが可能なツイストスライド機構及びロボットを提供する。
【解決手段】本発明のロボット10は、平行に配置された1対のボール螺子機構40,40における1対のベース駆動用ボールナット42,42を旋回ベース30と連結させた構成とすることで、それらボール螺子機構40,40を駆動する1対のベース駆動用サーボモータ81,81によって旋回ベース30のスライド駆動とツイスト駆動の両方を行うことができる。また、それら1対のベース駆動用サーボモータ81,81が共に固定ベース11に固定されているので、スライド動作の俊敏性の低下させずにツイスト動作の俊敏性を向上させることが可能になる。
(もっと読む)
3軸を有する手術支援マニピュレータ
【課題】全ての駆動手段をベースに配置可能な、パラレルメカニズムを用いた手術支援マニピュレータを提供する。
【解決手段】手術器具を並進動作させるための並進用連結連鎖を8本のリンクにより構成し、並進用連結連鎖の片端を手術器具に、他端をベースに固定した並進用駆動手段によって回転する並進用駆動軸に固定することで実現する。
(もっと読む)
作業ツールを備えたロボット
【課題】作業ツール管理装置を備えた前腕後部が上腕の内側を通過するアーム姿勢となるときであっても、線条体または作業ツール管理装置が上腕に干渉しないようにする。
【解決手段】ロボットの線条体処理機構において、作業ツール管理装置(34)に動力、信号および材料のうちの少なくとも一つを供給する作業ツール管理装置用線条体(50)は、旋回胴(12)に取付けられた側面とは反対側に位置する上腕(14)の側面において旋回胴から上腕の長手方向に沿って案内され、前腕(18)の前面(18b)に案内され、次いで上腕が取付けられている側面とは反対側に位置する前腕の側面を通って作業ツール管理装置(34)に接続されている。さらに、作業ツール管理装置用線条体は、前腕の側面または前面に取付けられた線条体中継部(39)により中継されて作業ツール管理装置に接続されている。
(もっと読む)
動作支援装置およびその制御方法
【課題】安全性が高く、かつ人間的なスムーズな動きを再現して上肢の動作を好適に支援すると共に、多様な場面で使用者の利便に供し、高いリハビリ効果の期待できる動作支援装置およびその制御方法を提供する。
【解決手段】使用者の上肢の動作を検出する第1検出手段30と、上肢の位置および姿勢を検出する第2検出手段14a、16a、18a、20aとを有し、これら各手段からの情報によって制御下に作動するマニピュレータ12を備え、このマニピュレータ12の先端は使用者の上肢が離間自在であり、該マニピュレータ12を第1検出手段30および第2検出手段14a、16a、18a、20aからの情報でフィードバック制御することで、上肢の動作を好適に支援する。
(もっと読む)
放射線治療システム
【課題】放射線治療システムにおいて、治療台の干渉を回避して安全性を向上させると共に、治療効率を向上させること。
【解決手段】放射線治療システム10は、治療用放射線を照射する照射ノズル11と、多関節ロボットで構成され且つ患者を乗せて照射ノズル11から照射される治療用放射線の照射位置に患者13の患部を位置決めする治療台12と、照射ノズル11及び治療台12を制御する制御部と、制御部に制御信号を入力する操作装置20と、操作装置20の操作者19の位置を検出する位置検出手段を備える。制御部は、位置検出手段で検出した操作者19の位置を基に当該操作者19との干渉を回避する移動経路を算出する経路算出装置42と、経路算出手段で算出した移動経路を基に治療台12の移動を制御する治療台制御装置42とを備える。
(もっと読む)
マニピュレータ
【課題】処置部の自由度が高いマニピュレータを一段と簡易な構成によって提供する。
【解決手段】処置対象に対して処置を行う処置部(作業部10)を先端に有する連結部40の長手方向に沿った方向に対して直交する回動軸16と、回動軸16回りに回動自在に支持され、回動軸16に対して直交する主軸部20bを有する主軸部材20と、回動軸16回りに回動自在に支持される歯車17と、回動軸16回りに回動自在に支持される歯車18と、歯車17と直交して噛み合い、回動軸16からオフセットした位置で主軸部20b回りに回動自在に支持される歯車22と、歯車18と直交して噛み合い、回動軸16からオフセットした位置で主軸部16回りに回動自在に支持される歯車23と、歯車22とともに回動する処置部材11と、歯車23とともに回動する処置部材12とを備える。
(もっと読む)
任意形状追従型固定装置及びそれを備えた検査・補修装置、並びにそれを用いた検査・補修方法
【課題】
検査装置や補修装置等の駆動軸数を低減し、装置の小型化及び簡素化、並びに制御システムの簡略化を図ることが可能な装置を提供することを課題とする。
【解決手段】
球状の回転体と回転体を格納及び保持する格納容器とから構成される関節状構造体と、回転体の動きを拘束する回転体固定機構とを備える。さらに、回転体固定機構は、回転体の摺動部に設置された磁粉と、回転体の外部に設置され、電気を通電することにより磁粉を固着させて回転体を拘束させる励磁コイルとを備える。これにより、検査装置や補修装置等の駆動軸数を低減し、装置の小型化及び簡素化、並びに制御システムの簡略化を図ることが可能となる。
(もっと読む)
3自由度能動回転関節
【課題】各自由度方向からなる任意の方向への一様な回転運動が可能であり、球関節に近いシンプルな構造を有する3自由度能動回転関節を提供する。
【解決手段】X軸用、Y軸用、Z軸用の中空軸回転型モータ20x、20y、20zの中空軸に挿設された出力軸21x、21y、21zに結合する回転球10と、中空軸回転型モータ20x、20y、20zをそれぞれ、それ自身の軸線まわりの回転を規制するとともに、他の直交2軸まわりのうち一方への回動を許容するように支持する可動支持体30x、30y、30zと、可動支持体30x、30y、30zをそれぞれ前記他の直交2軸まわりのうち他方への回動を許容するように支持する支持体50とを備え、一方のリンク60aがZ軸用の中空軸回転型モータ20zの後端から突出する出力軸21zに同軸上に固定され、他方のリンク60bが支持体50の支持端部50zの外面側に固定される。
(もっと読む)
ロボットのティーチングデータ作成方法
【課題】既存のティーチングデータにおける作業点の前後の退避点のデータを有効に利用し、ティーチングデータを迅速且つ容易に作成する。
【解決手段】既存のティーチングデータQ、Rから、作業点のデータ毎に関連性のある退避点のデータを含ませてグループを設定する(ステップS2)。新規に作成するティーチングデータPの作業点P1〜P4毎にグループのいずれか1つを適用する(ステップS3〜ステップS7)。選択されたグループを、作業点のTCPに基づいて回転変換する(ステップS8)。グループの端部同士を接続してティーチングデータPを設定する。
(もっと読む)
ロボットのティーチングデータ作成方法
【課題】既存のワークに対する既存のティーチングデータを有効に利用し、別のワークに対するティーチングデータの作成の自動化を図る。
【解決手段】ドア枠100、102に対する既存のティーチングデータQ、Rに基づいて、別のドア枠104の作業点P1〜P4に対応してティーチングデータPを設定する際、対象作業点P1からの距離が所定範囲γ以内であり、多関節型のロボット12の配列方向Cの距離が所定範囲γc以内である作業点を選択する。対象作業点P1に対するエンドエフェクタ22の姿勢に対して姿勢の差が所定範囲内である作業点をさらに選択する。対象作業点P1から移動させた場合に、多関節ロボットの先端側の3つの回転関節の姿勢差が最も小さい作業点を選択する。他の作業点P2〜P4についても同様にしてティーチングデータQ、Rの作業点から1つを選択する。
(もっと読む)
マイクロマニピュレータ
【課題】装置全体を複雑にすることなく微小物体を容易かつ適切に操作することができるマイクロマニピュレータを提供する。
【解決手段】マイクロマニピュレータ1は、細胞を載置するためのXYステージ42と、細胞を操作するための第1操作ユニット3と、第2操作ユニット4とを備えている。第1操作ユニット3は、細胞を操作するハンドリング部34と、ハンドリング部34をX、Y方向に移動させるXY駆動部31と、XY駆動部31に支持され、ハンドリング部34をZ方向に移動させるZ駆動部33とを有している。第2操作ユニット4は、細胞を操作するハンドリング部44と、XYステージ42をX、Y方向に移動させるXY駆動部41と、ハンドリング部44をZ方向に移動させるZ駆動部43とを有している。第1、第2操作ユニットでハンドリング部34、44に対する操作機能が異なる。
(もっと読む)
ロボットおよびマニピュレータ
【課題】 小型軽量化が可能で、簡易な機構でありながら高信頼性、高剛性および広動作範囲で動力を伝達する。
【解決手段】 動作伝達機構は、可撓性動力伝達機構51と、入力回転軸52と、駆動側リンク53と、従動側プーリ54とを有する。駆動側リンク53と従動側プーリ54とをワイヤ51で接続し、駆動側リンク53とワイヤ51との接続を二重にするか、あるいはカシメ部材56と固定部材84で固定するため、駆動側リンク53に多大な負荷がかかってもワイヤ51が切れにくくなり、信頼性および安全性が高くなる。
(もっと読む)
荷受装置及び運搬機械
【課題】 荷物の傾きを補正可能な荷受装置及び運搬機械を得る。
【解決手段】 運搬機械本体のツール支持部に取り付けられる基体21と、基体21に水平軸J6まわりに傾動可能に取り付けられ、荷物を支持する荷受体22とを備え、移動体32及び案内体33からなる一対の直動案内31,31を、水平軸J6から離れた位置で、移動体32の移動方向における互いの間隔が連続的に変化するように、一方を他方に対して傾斜させた状態で基体21及び荷受体22にそれぞれ取り付け、該一対の移動体32,32間を連結体34,35で連結し、該連結体に取り付けられたナット36に係合するねじ軸37を駆動装置M5により回動させて、連結体34,35を案内体33,33に沿って移動させることにより、荷受体22を水平軸J6まわりに傾動させ、荷受体22に支持された荷物を略水平に支持する。
(もっと読む)
産業ロボットのアーム構造
【課題】低い搬送高さを直線的に動作できる広い動作範囲を持ったコンパクトで低コストな産業ロボットのアーム構造を提供。
【解決手段】固定ベース1上に第1垂直軸aの回りに回転自在に支持された第1水平アーム2と、第1水平アーム2の先端に第2垂直軸bの回りに回転自在に支持された第2水平アーム3と、第2水平アーム3の先端に第4垂直軸dの回りに回転自在に支持された回転基台4と、からなる水平方向移動部と、回転基台4の上に第1水平軸gの回りに回転自在に支持された第1垂直アーム7と、第1垂直アーム7の先端に第2水平軸hの回りに回転自在に支持された第2垂直アーム8と、第2垂直アーム8の先端に第3水平軸iの回りに回転自在に支持された第3垂直アーム9と、第3垂直アーム9の先端に作業工具を取り付けるためのフランジ10を有する水平方向及び垂直方向移動部と、を有する。
(もっと読む)
ロボットアームと、その回転関節装置及び手首装置
【課題】 非製造業分野のためのロボットアームについて、関節動作の制限をできるだけなくし、またアームと環境との干渉を避けやすい構造とすること、また、対人、対環境安全性を向上させるため、外力に順応する動作が可能な構造にする。
【解決手段】 回転可能に連結した2つのリンクを駆動するため、角度検出器とトルク検出器とアクチュエータとローカルコントローラ8とを有し、関節の回転と共に摺動しながらリンク間の電気的接続を維持するスリップリング機構を具備する。角度検出器およびトルク検出器から得られた角度およびトルクの値に基づきながら、マスタコントローラから指示された位置、トルク、剛性、粘性の各特性に関する制御を同時に実現するため、アクチュエータへの制御コマンドをローカルコントローラ上で演算し、かつリンク間の電気的接続を維持しながら無限に回転可能である。
(もっと読む)
1 - 17 / 17
[ Back to top ]