
Fターム[3C007CS08]の内容
マニピュレータ、ロボット (46,145) | 基台 (1,360) | 無軌道で移動するもの (1,271)
Fターム[3C007CS08]に分類される特許
201 - 220 / 1,271
自律走行ロボット、自律走行ロボットを用いた追走システム、及び追走方法
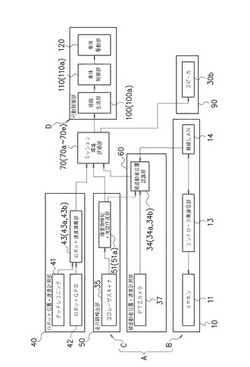
【課題】本発明は、被追走体を見失う事象が曲がり角以外の環境において生じる場合であっても、被追走体への追走を継続して行うことができるようにする。
【解決手段】本発明は、被追走体検出部37により、被追走体を見失ったか否かを判定する見失判定手段34aと、見失ったと判定したときには、見失った後の被追走体位置を推定する被追走体位置推定手段70bと、被追走体を見失う前の被追走体位置、被追走体を見失った後の被追走体推定位置及び遮視物の位置の相対的な位置関係に基づいて、その被追走体が遮視物に遮られたか否かを判定する遮視判定手段70aと、被追走体が遮視物に遮られたと判定したときには、その被追走体の被追走体推定位置を目標とした走行経路を生成する走行経路生成手段100aと、生成した上記走行経路に沿い、走行機構により移動させる走行手段110aとを有している。
(もっと読む)
予測不可能で動的な複雑な環境において計画することを伴う自律型ロボット

【課題】予測不可能な複雑な環境においてロボットが動きを行うことを可能にする自律型ロボットの制御方法を提供すること。
【解決手段】ロボットの動き制御のためのコントローラは、到達すべきターゲットに関する情報を該コントローラに供給するターゲット入力インターフェースと、該ロボットの内部モデルを使用して、制御される該ロボットの将来の状態の少なくとも1つを予測する予測モジュールと、前記予測モジュールから供給された予測状態から開始して、該ロボットの将来状態を計画する計画モジュールと、前記制御されるロボットをターゲットに到達させるべく、モータコマンドを出力する反応コントローラと、前記予測モジュールによって出力されたターゲットまたは前記計画モジュールからの出力を選択するターゲットアービトレータと、を備える。
(もっと読む)
遠隔操作システム及び遠隔操作方法
【課題】容易にロボット装置を最適な移動目標位置へ移動させ、操作内容を実行させることができる遠隔操作システム及び遠隔操作方法を提供すること。
【解決手段】ロボット装置を遠隔操作するための遠隔操作システムは、ロボット装置周辺を撮影する撮影手段と、撮影手段により撮影された撮影画像を表示する表示手段と、表示手段に表示された撮影画像上において、目標対象物に対する指示を入力する入力手段と、入力手段により入力された撮影画像上における目標対象物の指示方法に基づいて、ロボット装置を移動させる移動目標位置と、移動目標位置における前記ロボット装置の操作内容と、を推測する推測手段と、推測手段により推測された移動目標位置へロボット装置を移動させると共に、操作内容を実行させるための指令値を生成する指令値生成手段と、を備えている。
(もっと読む)
手投げ型ロボット
【課題】ロボットなどに用いられる新たな移動機構の提案。
【解決手段】移動機構として、モータの制御機能を有する本体と、本体の両側に対に設けられ本体に対して回動自在であり走行面に接地する駆動輪と、それぞれの駆動輪をモータでそれぞれ回転させる駆動手段と、それぞれの駆動輪の外側に、走行面に接地すると共に、駆動輪の回動と独立して本体との位置を固定的に保持される保持体とを有する。
(もっと読む)
ロボット装置
【課題】予め定められた状況以外の状況においてもユーザに対して適切な情報を提供することが可能なロボット装置を提供すること。
【解決手段】ロボット装置100は、状況情報取得部101と自律動作条件判定部102と自律動作部103と通信実行部104とを備える。状況情報取得部101は、周囲の状況を表す状況情報を取得する。自律動作条件判定部102は、状況情報取得部101により取得された状況情報に基づいて所定の自律動作条件が成立しているか否かを判定する。自律動作部103は、自律動作条件判定部102により自律動作条件が成立していると判定された場合、予め定められた動作を行う。通信実行部104は、自律動作条件判定部102により自律動作条件が成立していないと判定された場合、所定の通信先装置との間で通信を行う。
(もっと読む)
脚式ロボット
【課題】起伏や段差のある路面を安定に歩行することのできる脚式ロボットを提供する。
【解決手段】脚式ロボットは、記憶装置、4個以上の距離センサ群、路面センサ、及び、コントローラを備える。記憶装置は、足リンクの目標軌道を記憶している。距離センサ群は、足裏の4箇所以上の異なる位置に配置されている。各距離センサは、夫々の配置位置における足裏と路面との間の距離を計測する。路面センサは、路面の起伏や段差の形状を計測する。コントローラは次の処理を実行する。まずコントローラは、足リンクの目標軌道と路面センサの計測値によって定まる遊脚の足裏の接地予定領域を求める。次にコントローラは、求めた接地予定領域内に配置されている距離センサ群の中から3個の距離センサを選択する。そしてコントローラは、選択された3個の距離センサの計測値が等しくなるように足リンクの姿勢を制御する。
(もっと読む)
脚式ロボットとその制御方法
【課題】路面起伏にリアルタイムに適応して円滑に歩行することのできる脚式ロボットを提供する。
【解決手段】脚式ロボットは、記憶装置、離地位置と着地位置の間の路面起伏を計測する路面センサ、及び、脚の動作を制御するコントローラを備える。記憶装置は、歩行動作における足リンクの離地から着地までの遊脚軌道候補群を記憶している。複数の遊脚軌道候補は、相互にその軌道高さが異なっている。コントローラは、以下の計測ステップ、設定ステップ、選択ステップ、及び、制御ステップを実行する。計測ステップは、離地位置と着地位置の間の路面起伏を計測する。設定ステップは、計測された起伏表面に参照点を設定する。選択ステップは、参照点を通り脚式ロボットの進行方向と交差する鉛直面において参照点よりも高い位置でその鉛直面と交差する遊脚軌道候補を選択する。制御ステップは、選択された遊脚軌道候補に足リンクが追従するように脚を制御する。
(もっと読む)
コミュニケーションロボット開発支援装置
【解決手段】コミュニケーションロボットの開発を支援するためのものであり、テンプレートDB30には、たとえば行動モジュールがコミュニケーション行動の種類ごとにテンプレート化されて格納されている。テンプレート読み出し手段は、テンプレートDBから所望のテンプレートを読み出し、視覚化して、入力画面500を表示する。たとえば、コミュニケーションロボットの開発者等は、この入力画面500の引数入力領域に行動モジュールの実行に関する実行情報を入力する。行動モジュール作成手段は、テンプレート読み出し手段によって読み出されたテンプレートのデータに、入力画面の引数入力領域に入力された実行情報を取り込むことによって、新規の行動モジュールを作成する。
【効果】簡単に新規のビヘイビアを作成することができる。
(もっと読む)
ロボット制御装置、ロボット制御方法、及び脚式ロボット
【課題】制御性の高い脚式ロボット、その制御装置及び制御方法を提供すること。
【解決手段】本発明にかかるロボット制御装置は、複数の脚を備えるロボット101の関節を駆動して、ロボットを歩行させるロボット制御装置であって、ロボット101を取り巻く環境の情報である環境検出値に基づいて、ロボットの体幹垂直位置に対する許容範囲を決定し、ロボットの姿勢を表す姿勢検出値に基づいて、体幹垂直位置が許容範囲内になるように、ロボットを歩行させるものである。
(もっと読む)
制御システム、制御方法、操作制御装置及び作業装置
【課題】被制御体とその周辺にある障害物とが接近していることを操作者に伝えて遠隔制御に係る操作性を向上させる。
【解決手段】ロボット10は、ロボットハンド先端部とその周辺にある障害物との距離Lと、ロボットハンド先端部の移動速度Vを特定し(S1,S2)、ロボットハンド先端部が障害物に接触するまでの推定接触時間を算出する(S3)。ロボット10は、ロボットハンド先端部が障害物に接近している旨を通知する接触情報を操作制御装置20宛てに送信した時から、通信路を経由して接触情報が操作制御装置20に到達するまでの伝送所要時間の予測値Tdを取得する(S4)。ロボット10は、推定所要時間が予測値Tdと規定時間Trとの和以下になると(S5;YES)、接触情報を送信する(S6,S7)。これにより通信遅延の程度に関わらず、操作制御装置20は、現に接触がある前に接触情報に基づき両者の接近を報知する(S8,S9)。
(もっと読む)
移動体及び移動体の教示方法
【課題】教示作業を効率化するとともに、移動体の走行位置精度を向上することができるようにした、移動体及び移動体の教示方法を提供する。
【解決手段】車体1を走行させる走行装置4と、走行装置4を制御する制御装置3と、車体1の前方向を撮像する第1カメラ6と、車体1の後方向を撮像する第2カメラ7と、を有して構成し、制御装置3は、予め設定された車体の走行経路上の複数の教示地点のそれぞれにおいて、第1カメラ6及び第2カメラ7によって画像を取得し、それぞれ取得した画像を教示画像として記憶する教示画像取得部21と、第1カメラ6によりリアルタイムに撮像された撮像画像と、教示画像取得部21により予め取得された教示画像との比較結果に基づいて走行装置3を制御する走行制御部22とを有する。
(もっと読む)
加工システム
【課題】搬送レール等の軌道部材を用いることなく床面に設定した走行経路を搬送装置に走行させる無軌道型搬送システムを用いるとともに、走行経路に沿って配置された各工作機械に対する搬送装置の位置を、より高精度に位置決めすることが可能な加工システムを提供する。
【解決手段】搬送装置20は、走行経路R1に沿って床面F上にて走行及び停止可能な台車21と、ワークWの搬入または搬出を行うロボット22と、工作機械MCnに設けられた被連結手段CM(または連結手段CA)と連結可能な連結手段CA(または被連結手段CM)とを備え、工作機械には、自己の搬入・搬出位置に到達した搬送装置の連結手段と連結可能な位置に被連結手段が設けられており、搬送装置は、任意の工作機械の搬入・搬出位置に到達すると、連結手段と被連結手段を連結し、工作機械に対するロボットの相対位置及び相対方向を補正した後、ワークの搬入またはワークの搬出を行う。
(もっと読む)
機械および機械システム
【課題】BMIを適用した機械操作(例えば、ロボット操作)において、ユーザの煩わしさ、負担を軽減する技術を提供することを目的とする。
【解決手段】機械(例えば、実施の形態におけるロボット20)は、ユーザの脳活動を解析した脳解析情報に基づいてユーザの意図に基づく動作であるユーザ意図動作を決定するユーザ意図動作決定部110(ユーザ意図動作決定手段)と、自律動作を決定する際の基礎となる自律動作基礎情報を取得する自律動作基礎情報取得部120(自律動作基礎情報取得手段)と、前記自律動作基礎情報に基づいて前記自律動作を決定する自律動作決定部130(自律動作決定手段)と、前記ユーザ意図動作および前記自律動作に基づいて実行するべき確定動作を決定する確定動作決定140(確定動作決定手段)とを備える。
(もっと読む)
情報提供システム
【構成】情報提供システム100は、中央制御装置10、LRF12およびロボット14を含む。中央制御装置10が備えるメモリ(18)には、ショッピングモール内の店舗などに関するリコメンド情報であるトピックスと、店舗などに向かう大局行動を表わす移動軌跡(P_Tx)が記憶される。ショッピングモール内の人間は、LRF12によって移動軌跡(P)が検出され、最も類似する移動軌跡(P_Tx)が特定される。そして、中央制御装置10は、特定された移動軌跡(P_Tx)に対応するトピックスの発話内容を読み出し、人間の位置と共にロボット14に付与する。ロボット14は、付与されたトピックスの発話内容を発話することで、人間にリコメンド情報を提供する。
【効果】人間は、検出された移動軌跡から大局行動が予測され、予測された大局行動に基づいて、リコメンド情報が提供される。
(もっと読む)
情報提供装置
【課題】ユーザの意思を反映した適切な情報提供を行う。
【解決手段】腕部移動量検出系36により検出される、腕部30が物体(絵画等)を指し示すために移動した移動量と、ロボット位置検出系24により検出されるグローバル座標系上における情報提供ロボットの位置及び向き(回転)と、に基づいて、腕部30の手先が指し示す方向のベクトル及び手先位置(ベクトルの始点)をグローバル座標系上にて算出し、この算出結果と、物体の位置座標データとに基づいて、物体特定部56が、腕部30の手先が指し示している物体を特定し、情報提供部58が特定された物体の情報をユーザに提供する。
(もっと読む)
ネットワークロボットシステム、ロボット制御装置、ロボット制御方法およびロボット制御プログラム
【構成】 ネットワークロボットシステム10は、ロボット12を含み、ロボット12はサービスの提供に係る移動経路の生成要求の要求メッセージをロボット制御装置102に送信する。ロボット制御装置102は、要求メッセージを受けて、ロボット12同士が衝突しないように、当該要求メッセージについての移動経路を生成する。そして、ロボット制御装置102は、移動経路のうちの一定時間(T秒)分の移動経路についての移動経路データをロボット12に送信する。
【効果】 他のロボットと干渉することなく、確実に移動することができる。
(もっと読む)
遠隔操作装置
【構成】遠隔操作装置10は、LRF12a,12bを含み、LRF12a,12bと同じ場所に設けられるロボット14を遠隔操作する。遠隔操作装置10はLRF12a,12bを利用して検出領域(E)内に居る人間の局所行動を検出し、その局所行動を記録する。検出領域(E)内は空間グリッド化され、その空間グリッド毎に局所行動のヒストグラムが算出される。遠隔操作装置10は、ヒストグラムから算出される類似度に基づいて空間グリッドをクラスタリングして、クラスタリング地図をLCD(22)に表示する。表示されたクラスタリング地図に含まれる任意のエリアが選択されると、ロボット14には、選択されたエリアの属性に基づいて決まる動作命令と、座標情報とが付与される。
【効果】使用者は、複数の人間の行動が視覚的に示されるクラスタリング地図を参照して、ロボット14を遠隔操作することができる。
(もっと読む)
福祉用ロボット装置のロボットアーム操作方法、ロボットアーム操作プログラム、及び、記録媒体
【課題】物体の把持や器具・装置等の操作が容易に行うことができる福祉用ロボットアームのロボットアーム操作技術を提供する。
【解決手段】本発明によれば、ユーザの手動によってロボットアームを動かして、当該ロボットアームに搭載されたカメラを、当該ロボットアームの動作に関する情報が含まれた画像マークの近傍に配置し(手動モード)、当該カメラにて撮像された画像に画像マークの像が含まれているとき、当該画像マークの像を参照して当該画像マークにより表現された上記情報を読み出し(情報読出工程)、得られた上記情報に基づいて、ロボットアームの動作を自動制御する(ロボットアーム制御工程)とを含んでいる。
(もっと読む)
対物行動推定装置およびサービス提供システム
【構成】 対物行動推定装置10は、コンピュータ30を含み、環境に設置された位置検出システム12によって検出される人間(16)および対象物(18)の位置情報に基づいて、環境内に存在する人間が特定の対象物に対してどのような行動を行っているかを推定する。コンピュータ30は、位置検出システム12から、人間および対象物の所定時間分の位置履歴データを取得し、この位置履歴データを用いて人間および対象物との相互間に関する特徴量を算出する。そして、算出した特徴量を判別式に与えることにより、人間の対物行動を推定する。
【効果】 特定の対象物に対する人間の行動を短時間で推定できるので、その行動に素早く対応したサービスを提供できる。
(もっと読む)
ロボット
【課題】ロボットにより行われるドア開閉方法に関し、特に開閉方向が未知であるドアを自動的に開閉できるようにする。
【解決手段】ロボットは、ロボットアーム1と、取っ手を把持するハンド形状あるいは引っ掛けられる形状の手先効果器2を備えており、ロボットがドア取っ手を把持している手先を様々な方向に動かし、力検出部3により力情報を検出するとともに手先位置計算部4により算出された手先の位置変位を検出する。力検出部3で検出された力が閾値以上ならば真のドア開閉方向ではなく、力検出部3で検出された力が閾値以下かつ手先位置計算部4により算出された動作の試行前後の手先の位置変位があれば、真のドア開閉方向であるものとする。
(もっと読む)
201 - 220 / 1,271
[ Back to top ]