
Fターム[3C007CS08]の内容
マニピュレータ、ロボット (46,145) | 基台 (1,360) | 無軌道で移動するもの (1,271)
Fターム[3C007CS08]に分類される特許
141 - 160 / 1,271
作業機械の操作支援装置
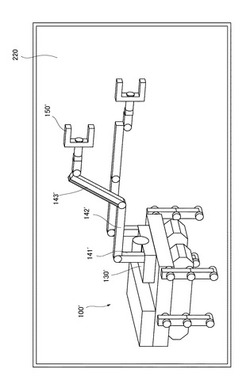
【課題】アクチュエータの駆動によって直接的に作動している部位をオペレータが確実に把握できるようにすることで、誤操作を生じにくくする作業機械の操作支援装置を提供する。
【解決手段】動作させる部材に対応付けられた部材の画像143´を、実際の部材の相対位置関係に近似させて画像表示させるための画像表示部220を備え、部材のうちアクチュエータの駆動によって直接的に作動している部材を特定するとともに、特定された部材に対応する部材の画像143´を、他の部位の画像130´,141´,142´,150´と識別可能に画像表示部220に表示させるようにした。
(もっと読む)
移動可能領域抽出装置、移動可能領域抽出システム、移動可能領域抽出方法、およびプログラム

【課題】自律移動ロボットの移動に障害となる障害物の位置を事前に検出し、自律移動ロボットが目的地まで移動する経路を生成するための移動可能領域を抽出する移動可能領域抽出装置、移動可能領域抽出システム、移動可能領域抽出方法、およびプログラムを提供する。
【解決手段】予め定められた床面の高さを表す床面判定値に基づいて、移動体と異なる位置で移動体の移動範囲内に設置された距離センサの情報に基づいて算出された観測点の高さの情報に基づいて、移動体が移動できる床面を示す床面観測点を判別する床面判別手段と、距離センサの情報に基づいて算出された観測点の位置の情報に基づいて、予め定められた二次元のグリッドマップに、床面観測点が含まれるか否かを示すフラグをマッピングする床面マッピング手段と、床面観測点が含まれることを示しているグリッドマップの領域に基づいて、移動可能領域を抽出する領域抽出手段と、を備える。
(もっと読む)
脚式ロボットとそのための歩容データ生成方法
【課題】脚式ロボットの歩容データを効率よく生成する方法を提供する。
【解決手段】歩容データを生成する方法は、以下の第1〜第4ステップを有する。第1ステップでは、脚式ロボットのZMP方程式において、動作依存モーメント項に初期値を代入して重心と足の目標軌道を決定する。動作依存モーメントは、脚式ロボットの脚の動作に起因して重心回りに作用するモーメントを意味する。第2ステップでは、得られた重心と足の目標軌道に脚式ロボットの質点モデルを適用して重心の目標軌道上の各時刻における重心回りの角運動量を算出する。質点モデルは、夫々の脚を1個の質点でモデル化したものである。第3ステップでは、各時刻の角運動量から、角運動量変化に相当する相当モーメントを算出する。第4ステップでは、ZMP方程式の動作依存モーメントの項に相当モーメントを代入して重心と足の目標軌道を再決定する。
(もっと読む)
回転ダンパーおよびそれを具えるロボット関節駆動装置
【課題】小出力化した柔構造のロボットの関節に用いても、ロボットの通常作動を妨げずに作動停止時の駆動トルクの変動による振動を速やかに減衰させ、作業のタスクタイムを短縮することができる回転ダンパーを提供することにある。
【解決手段】基部材と、前記基部材に対し所定軸線周りに回転可能に配置された回転部材と、前記基部材と前記回転部材との少なくとも一方に固設されるとともに他方へ向けて押圧されて前記他方に摺接し、前記基部材に対する前記回転部材の相対回転に摩擦制動力を与える摩擦部材と、前記摩擦部材に前記他方へ向けて押圧力を加える押圧手段と、前記回転部材の回転速度が上がると前記摩擦部材に加わる押圧力を減少させる押圧力変更手段と、を具えてなる回転ダンパーである。
(もっと読む)
電子機器
【課題】人に生物的な擬似感覚を与える新たなペット型玩具あるいはペット型ロボットの提供。
【解決手段】燃料電池21と、燃料電池21の出力に関する情報を電気信号に変換して出力するコントローラ10と、コントローラ10から出力される電気信号に基づいて、外部から認知可能な物理的変化を提示するスピーカ18、アクチュエータ3AA1〜5A2等を備える電子機器を提供する。この電子機器では、生物個体の活動に近似した燃料電池の出力特性に応じて動作や音声出力等を制御し、ユーザに提示させることで、ユーザに生物的な擬似感覚を与えることができる。
(もっと読む)
脚式移動ロボットの歩容生成装置
【課題】瞬時歩容発生手段が発生した瞬時目標運動では考慮されていない、各脚体の中間部の関節の屈曲動作に伴う慣性力の影響を補償して、動力学的な精度を高めるように該瞬時目標運動を補正する。
【解決手段】ロボット1の各可動体2の中間部の関節の曲げ角を参照量Aとし、各可動体2の先端部近傍の所定の点と、該可動体2の上体3との連結部近傍の所定の点とを結ぶ線分と、該可動2の中間部の関節の中心または該関節に連結されたリンクの重心との前記線分に交差する方向での相対位置を参照量Bとしたとき、参照量A又は参照量Bに応じて、フィードフォワード制御則によりロボット1の瞬時目標運動の上体位置と上体姿勢とのうちの少なくともいずれか一方の補正量を決定し、その決定した補正量で瞬時目標運動の上体位置と上体姿勢とのうちの少なくともいずれか一方を補正する。
(もっと読む)
二脚式歩行装置
【課題】大きな歩幅と安定性とを両立させる。
【解決手段】少なくとも3点の接地点を有する右足裏1および左足裏3と、右足裏1から上方側に向かって延びるとともに右足裏1に対して回転接続される右脚2と、左足裏3から上方側に向かって延びるとともに左足裏3に対して回転接続される左脚4と、右脚2のうち右足裏1の反対側部位とを備え、右足裏1は、ジグザグ平面ローラー11の二等辺三角形のうち1つの二等辺三角形の底辺側部位上に位置し、左足裏3は、ジグザグ平面ローラー11の二等辺三角形のうち右足裏1に隣り合う二等辺三角形の底辺側部位上に位置し、ジグザグ平面ローラー11が転がる際に二等辺三角形が順番に接地して進行するように、右足裏1および左足裏3が順番に接地し歩行を実行する。
(もっと読む)
自律移動ロボット
【課題】人の移動したい方向が不明な場合でも、自律移動ロボットの適切な移動を実現する。
【解決手段】動作決定部80及び走行制御部66は、音声認識部56の認識結果に基づいて人が自律移動ロボットを退かそうとしているか否かを判定するとともに、人物検出部60と顔検出部52の検出結果に基づいて人が移動したい方向を判定する。この判定の結果、人に自律移動ロボットを退かそうとする意志があるが移動したい方向が不明と判定された場合には、自律移動ロボットを、人から離れる方向に移動させ、自律移動ロボットが人から離れる方向に移動した後に人が動いた方向に基づいて、自律移動ロボットを人から離れる方向に移動する。
(もっと読む)
ロボット装置及びその制御方法
【課題】操作性を向上させたロボット装置及びその制御方法を提供すること。
【解決手段】ロボット装置10は、移動可能な台車部1と、台車部1に回動可能に連結されたロボットアーム2と、ロボットアーム2及び/又は台車部1を操作するための操作情報を入力する操作手段と、操作手段を台車部1に相対移動が可能となるように接続する接続手段と、操作手段の相対位置を検出する位置検出手段と、台車部に設けられ、操作手段からの操作情報と、位置検出手段により検出された操作手段の相対位置とに基づいて、ロボットアーム2及び/又は台車部1の駆動を制御する制御手段と、を備えている。
(もっと読む)
液圧駆動のアクチュエータ、それを組み込んだ液圧駆動のアクチュエータユニット、およびそれらを組み上げた液圧駆動のロボット
【課題】 周囲の状況に応じた“柔軟な制御”“柔軟な動作”を行うことができ、 “直線状の動き”と“曲線状の動き”も可能とした2面性を同時に兼ね備えた液圧駆動のアクチュエータやそれらを組み上げたロボットを提供する。
【解決手段】 シリンダ室内に液媒体が充填される第1のシリンダ体10と第2のシリンダ体20と、液媒体が充填される中空部31を備えたピストン体30と、第1のシリンダ体10とピストン体30と第2のシリンダ体20により形成される液媒体空間内に液圧を供給する液圧供給機構40を備えた液圧駆動のアクチュエータである。ピストン体30は可撓性を有した曲がる素材でできており、アクチュエータ100全体として曲がりながらシリンダ−ピストン駆動により伸縮することができる。なお、伸長を制御する間隔リミッタ50と弾性体60も備えた構造とすることが好ましい。
(もっと読む)
ロボットシステム
【課題】カメラをハンドに内蔵しながらも、より広範囲にある物品を検出して把持することができるロボットシステムを提供する。
【解決手段】物品を把持するハンドと、ハンドを回転駆動させるアームと、ロボットの動作を制御するコントローラと、ハンドに内蔵され、アームにより回転されるハンドの回転軸に対して撮像方向がオフセットするように配設されたカメラと、カメラにより取得された画像情報を処理してコントローラに信号を送信する画像処理装置と、を有して構成する。
(もっと読む)
人型歩行ロボット用脚
【課題】人型歩行ロボット用脚において、人の脚、特に女性の脚に近いスリムなプロポーションを実現することにある。
【解決手段】下腿8の上部に配置したモータ13aと直線駆動機構13bとをベルト式伝動機構13dで駆動結合し、下腿8下部に配置したモータ14aと下腿8の左右方向へ延在する中間軸14bとをベベルギヤ組14cで駆動結合し、下腿8に軸線P4周りに揺動可能に支持した関節部材11cに足9を軸線R3周りに揺動可能に支持し、軸線R3上に同軸型減速機14dを配置してその出力要素を足9に結合し、関節部材11cの、軸線P4上から外れた部位と直線駆動機構13bの出力要素13fとをリンク部材13hで連結し、関節部材11cの、軸線P4上の位置に回動可能に支持した中間軸14eと、中間軸14bとをベルト式伝動機構14hで駆動結合し、同軸型減速機14dの入力要素と中間軸14eとをベベルギヤ組14iで駆動結合する。
(もっと読む)
救助ロボット
【課題】簡単な構造で、要救助者を確実かつ円滑に救助し、救出時間の短縮を図る。
【解決手段】救助ロボットは2機のクローラ5、6にそれぞれ、2台のコンベア8、9が分割配置され、要救助者の救出に際して、前側のコンベア8をクローラ5の進行方向前方の走行面に向けて前進傾動させ、各クローラ5、6の低速の前進走行とともに各コンベア8、9を各クローラの走行方向とは反対方向に各クローラの走行速度と同期させて回転駆動し、前側のコンベア8の先端を要救助者が居る地点の要救助者の接触面と要救助者の身体との間に潜り込ませて当該要救助者を前後の各コンベア8、9上に引き上げ収容する。
(もっと読む)
脚式移動ロボットの制御装置
【課題】ロボットの実際の姿勢と目標とする姿勢とのずれを低減することと、ロボットの継続的な動作を行なうこととを適切に実現し得る目標運動を生成しつつ、ロボットの動作制御を行なう。
【解決手段】ロボット1の姿勢のずれのを低減するためのフィードバック操作量としてのモデル外力操作量の将来予測値の時系列を生成する手段114を備える。目標運動決定手段100は、モデル外力操作量の将来予測値の時系列により規定される付加的外力の時系列を動力学モデル上でのロボットに付加的に作用させたと仮定した場合のロボットの運動が将来において到達目標に到達又は収束するように、目標運動の瞬時値を逐次決定する。
(もっと読む)
センサ固定具
【課題】ロボット等に使用される複数個のセンサからなるセンサ装置において、複数個のセンサで形成される指向領域がつながるようにセンサを配置すること可能とするセンサ固定具を提供することを課題とする。
【解決手段】本発明のセンサ固定具は、複数のセンサを固定可能なセンサ固定具であって、複数のセンサをその上下から挟み固定する為の挟持部材と、センサと挟持部材とを固定する為の連結部材とを備え、挟持部材は挟持部を有し、該挟持部材の挟持部が、センサの被挟持部と対応な形状となっていることを特徴とする。
(もっと読む)
脚式移動ロボットの制御装置
【課題】ロボットの実際の姿勢の目標姿勢からのずれを素早く補償し得るように目標運動を逐次決定しつつ、ロボットの運動を適切な目標運動に制御する。
【解決手段】第1動力学モデルを用いてロボット1の第1運動の瞬時値を逐次決定する第1運動決定手段100と、第2動力学モデルを用いてロボット1の第2運動の瞬時値を逐次決定する第2運動決定手段120とを備え、第1運動と第2運動とを合成することによりロボット1の目標運動を逐次決定する。ロボット1の実際の姿勢と目標姿勢とのずれを“0”に近づける機能を有するフィードバック操作量の低周波成分、高周波成分をそれぞれ第1運動決定手段100、第2運動決定手段120にフィードバックする。
(もっと読む)
脚式移動ロボットの制御装置
【課題】ロボットの移動経路周辺に存在する所定種類の段差部を適切に回避し得る目標運動を生成しつつ、ロボットの動作制御を行う。
【解決手段】目標運動決定手段100は、ロボット1の移動環境の床形状情報とロボット1の移動経路に関する要求とに基づき、ロボット1の脚体2の先端部の運動の軌道を規定する脚体運動パラメータを決定しつつ、ロボット1の目標運動を逐次決定する。目標運動決定手段100に床形状情報を出力する床形状情報出力手段114は、所定種類の段差部DFの起立面を実際の起立面よりも緩斜面に整形してなる床形状情報を出力する。
(もっと読む)
脚式移動ロボットの歩容生成装置
【課題】瞬時歩容発生手段が発生した瞬時目標運動では考慮されていない、各脚体の中間部の関節の屈曲動作に伴う慣性力の影響を補償して、動力学的な精度を高めるように該瞬時目標運動を補正する。
【解決手段】ロボット1の直立姿勢状態から、各脚体2の先端部近傍の所定の点と、脚体2の上体3との連結部近傍の所定の点とを結ぶ線分の長さが縮まるように各脚体2の中間部の関節16R,Lを屈曲させて、関節16R,Lを前記線分と交差する方向に突出させる歩容を生成するとき、上体3と各脚体2との連結部の位置を、瞬時目標運動で定まる該連結部の位置から脚体2の中間部の関節16R,Lの突出の向きとほぼ逆向きに変位させ、且つ、上体3の下端に対する上端の位置を、瞬時目標運動で定まる上体3の下端に対する上端の位置から脚体2の中間部の関節16R,Lの突出の向きとほぼ同じ向きに変位させるように瞬時目標運動を補正する。
(もっと読む)
アーム装置及びその電力供給方法
【課題】低コストで機構設計が容易なアーム装置及びその電力供給方法を提供すること。
【解決手段】本発明にかかるアーム装置1は、アーム10と、スーパーキャパシタ40とを備える。アーム10は、少なくとも1つの関節11と、関節11と回動可能に連結されたアームユニット12と、電源30からの電力供給により前記関節を駆動する駆動手段と、を有し、本体70に回動可能に連結されている。スーパーキャパシタ40は、アーム10に設けられ、本体70に設けられた電源30に第1の送電線60aを介して接続されている。また、スーパーキャパシタ40は、第1の送電線60aよりも太い第2の送電線60bを介して、アーム10の駆動手段に接続されている。
(もっと読む)
妨害電磁波制御方法、妨害電磁波制御プログラム及びロボット
【課題】電磁波放出レベルを抑制する。
【解決手段】規制レベル検出手段12は、対象装置の現在位置を取得し、地図情報に基づいて現在位置を含む対象領域の電磁波規制レベルを検出する。動作状態選択手段13は、形状別電磁波レベル情報及び部位別電磁波レベル情報に登録されている動作状態から検出した電磁波規制レベルに適合する電磁波放出レベルに対応する動作状態を選択する。そして、駆動制御手段14は、選択した動作状態に応じて複数の部位を駆動する駆動指示を出す。
(もっと読む)
141 - 160 / 1,271
[ Back to top ]