
Fターム[3C007CW10]の内容
マニピュレータ、ロボット (46,145) | 第2の腕の動作形態 (416) | 第2の腕が回動するもの (374) | 腕の軸心まわりに回転するもの (22)
Fターム[3C007CW10]に分類される特許
1 - 20 / 22
7軸多関節ロボットの制御方法、制御プログラム及びロボット制御装置
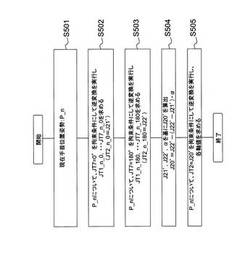
【課題】7つの関節のうち基端側にある3つの関節の各回転軸のうち少なくとも1軸が他の軸と一点で交わらない機構を持った7軸多関節ロボットを人間の腕のように滑らかに動作させる制御を適切に実現する。
【解決手段】基端から先端に向かって順に設けられた7つの関節を具備し、当該7つの関節が次の関節を旋回させる回転軸と次の関節を回動させる回転軸とを交互に有しており、かつ当該基端側にある3つの関節の各回転軸が一点で交わらないように構成された7軸多関節ロボットの制御方法であって、前記3つの関節のうち中間関節の回転軸を肩とみなした場合の擬似的な肘角度が一定となるような前記中間関節の関節角を拘束条件に用いて逆変換を実行する(ステップS505)。
(もっと読む)
多関節ロボットおよびロボット関節構造

【課題】バックラッシュによるガタツキを抑制することにより、関節部を精度よく動作させることが可能な多関節ロボットを提供する。
【解決手段】この多関節ロボット100は、骨格フレーム21側に設けられ、互いに対向するように配置されるとともに、曲げ軸L4を回動中心として互いに独立して回動可能な一対の入力側傘歯車62と、一対の入力側傘歯車62の両方に噛み合うように骨格フレーム31側に設けられ、一対の入力側傘歯車62が回動することによって、回動軸L3を回動中心として回動可能であるとともに曲げ軸L4回りに揺動可能な出力側傘歯車63と、一対の入力側傘歯車62の両方に噛み合った状態で出力側傘歯車63を回動軸L3回りの一方の回動方向に付勢する定荷重バネ64とを含む。
(もっと読む)
荷搬送アームおよび荷搬送アームを備えた荷搬送ロボット
【目的】複雑な制御を必要とせず荷物を傷つけずに保持できる荷搬送アームおよび荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体には、左右一対のアームを設け、アームの前腕21には、荷を当接支持する手先部30を軸35に回転可能に設けた。手先部30は、荷に当接する当接面30Aを有し、当接面30Aを前腕21の長手方向に垂直に付勢するねじりコイルバネ36の一端を固定し、ねじりコイルバネ36の他端は前腕21に固定されている。荷搬送ロボットは、荷の表面に当接面30Aを当接させるように前腕21を可動させ、荷の表面の向きに合わせて手先部30を軸35を中心に回転させる。当接面30A全体を荷の表面に当接させた状態で、前腕21を可動させ、手先部30を介して軸35にて荷の荷重を受けて、荷を移動させる。
(もっと読む)
ロボット及びその製造方法
【課題】樹脂で形成された加工精度の高い軽量なロボットアームを備えたロボットを提供する。
【解決手段】第1アーム10に連結された第1アクチュエータ20と、第1アクチュエータ20を収容する第1収容部105を有する関節フレーム100を備え、第1収容部105は、樹脂Aの硬化物により形成された基礎フレーム101と、樹脂Aの硬化物よりも高い融解温度を有する樹脂Bの硬化物により形成された第1フレーム102とを接合して構成され、第1アクチュエータ20は、第1フレーム102に固定される。
(もっと読む)
サービス提供システム及びサービス提供方法
【課題】無人あるいは通常よりも少ない人員であってもより多様な商品及び役務を提供することができるようにしたサービス提供システムを提供する。
【解決手段】インターフェイスにより注文入力情報の入力を受け付け、インターフェイスにより入力された注文入力情報に基づいて、ロボットユニットに加工作業を実行させロボットユニットにより加工作業を施した商品を提供する。
(もっと読む)
ロボットの制御装置
【課題】鉛直方向を検出することのできるロボットの制御装置を提供する。
【解決手段】ロボット10は、第4軸線J4の方向に延びるとともに、第4軸線J4を中心として回転可能に支持された第2上アーム16Bと、第4軸線J4に直交する第5軸線J5から離れる方向へ延びるとともに、第2上アーム16Bにより第5軸線J5を中心として回転可能に支持された手首部17とを備える。第4軸線J4を中心として第2上アーム16Bを重力により自由回転させ、且つ第5軸線J5を中心として手首部17を重力により自由回転させた場合に、手首部17の先端が指す方向を鉛直方向として検出する。
(もっと読む)
双腕ロボット及びそのハンドリング方法
【課題】双腕ロボット及びそのハンドリング方法において、パレタイズ時にワークを適切な位置に整列積載する。
【解決手段】双腕ロボットは、左右一対で構成されたワークを保持する第1ハンド部2a及び第2ハンド部2bと、制御部とを備える。両ハンド部2a、2bは、それぞれ長爪21と可動する短爪22とを有する。両ハンド部2a、2bによってワークWaを保持しているとき、制御部は、先に第1ハンド部2aを退避させ、ワークWaの第1ハンド部2a側の隅部を降下させる。次に、制御部は、第2ハンド部2bを退避させ、ワークWaの第2ハンド部2b側の隅部を降下させ、ワークWaをワークWb上に積載する。これにより、先の第1ハンド部2aの退避時においても、またその後の第2ハンド部2bの退避時においても、各ハンド部の摩擦力が動摩擦となり、それぞれの動作時にワークがハンド部に引っ張られることがなくなる。
(もっと読む)
双腕ロボット及びそのハンドリング方法
【課題】双腕ロボット及びそのハンドリング方法において、パレタイズ時にワークを歪むことなく保持する。
【解決手段】双腕ロボットは、左右一対で構成されたワークを保持する第1ハンド部2a及び第2ハンド部2bと、制御部とを備える。両ハンド部2a、2bは、それぞれ長爪21と可動する短爪22とを有する。ワークWがストッパ91によって位置決めされているとき、制御部は、両ハンド部2a、2bを移動させて両爪21、22の間にワークWを位置させる。そして、両ハンド部2a、2bを距離m1だけ移動させることにより、ワークWを押し動かしてワークWとストッパ91との間にクリアランスCを生じさせる。これにより、その後、両ハンド部2a、2bの短爪22を可動させても、ワークWがストッパ91に押し付けられて歪むことがなくなり、ワークWを長爪21に押し付けて保持することができる。
(もっと読む)
基板ハンドリングシステム及び基板ハンドリング方法
【課題】基板の振動や変形を抑制しつつ基板を高速度で搬送する。
【解決手段】基板ハンドリングシステム1は、ガラス基板Gを搬送するための搬送路20を備え、搬送路20は、エアの吹出及び吸引によって搬送路20上でガラス基板Gを浮上保持する基板浮上装置25と、ガラス基板Gを保持し当該ガラス基板Gを移動させる駆動機構24と、を有しており、ガラス基板Gを浮上保持しながら搬送方向Xに搬送する。この基板ハンドリングシステム1では、ガラス基板Gを高速度で搬送しても、ガラス基板Gの主面が傷付くのを確実に抑制できると共に、高い保持剛性によって、ガラス基板Gの振動を抑制し且つガラス基板Gに変形があってもこれを搬送路20に倣った状態にすることができる。
(もっと読む)
ロボットの動作経路作成装置及びロボットの動作経路作成方法
【課題】7個以上の関節を持つロボットにおいて、特異姿勢を回避した動作経路を高効率に作成するロボットの動作経路作成装置及び動作経路作成方法を提供することを課題とする。
【解決手段】7個以上の関節を持つロボットの動作経路を作成するロボットの動作経路作成装置1であって、ロボットの特定部位の位置及び姿勢を定義する経由点を設定する経由点設定手段3と、経由点に対する関節ベクトルの候補を生成する際に使用する関節の数を6個以下で設定する関節数設定手段3,5と、経由点毎に、ロボットの特定部位が経由点の位置及び姿勢となるための設定した数分の各関節の関節角度を計算し、当該各関節の関節角度からなる関節ベクトルの候補を複数生成する関節ベクトル候補生成手段6と、経由点毎の複数の関節ベクトルの候補の中からロボットが特異姿勢にならない各経由点の関節ベクトルの候補の組み合わせを選択する選択手段7とを備えることを特徴とする。
(もっと読む)
ロボット装置
【課題】6関節ロボットと併用して7関節ロボットを使用することで、ロボットの設置密度を高めた、生産効率の高いロボットによるロボットシステムを提供する。
【解決手段】7関節ロボットと前記6関節ロボットとを、前後方向に隣接して配置し、第2のアーム体、第3のアーム体、第4のアーム体、第5のアーム体を回転させ、J2を含むXY平面とJ1の交点及びJ6を支点として、J4が略円弧軌跡を描くことによって、前記6関節ロボットの下腕部または上腕部との干渉を回避する手段を備える。
(もっと読む)
ロボットアーム
【課題】精密な作業が可能であって人間の生活環境でも安全に使用でき、しかも極力小型軽量化できる多関節ロボットアームを提供する。
【解決手段】剛性能動関節とされた肘関節J3〜J5および手首関節J6,J7により、ハンドHDの位置や姿勢の精度が十分に確保されるため、ハンドHDによる精密な作業が可能となる。また、柔軟能動関節とされた肩関節J1,J2により、人体に接触した際の衝撃が緩和されるため、人間の生活環境での安全な使用が可能となる。さらに、大型で重量も嵩む柔軟能動関節は、基端部側の2つの肩関節J1,J2のみとされているため、大型重量化が最小限に抑えられる。しかも、重量の嵩む肩関節J1,J2の重量に起因する大きなモーメントは先端部側の肘関節J3〜J5、手首関節J6,J7には作用しないため、これらの関節を補剛する必要がなく、その分、大型重量化が抑えられる。
(もっと読む)
ロボットシステム
【課題】6関節ロボットと併用して7関節ロボットを使用することで、ロボットの設置密度を高めた、生産効率の高いロボットによるロボットシステムを提供する。
【解決手段】7関節ロボットと前記6関節ロボットとを、左右方向に隣接して配置し、7関節ロボットの第2のアーム体、第3のアーム体、第4のアーム体および第5のアーム体を回転させ、前記第1のアーム体と前記第2のアーム体を接続する関節および前記第5のアーム体と第6のアーム体を接続する関節を支点として、前記第3のアーム体と前記第4のアーム体を接続する関節が円弧軌跡を描くことによって、前記6関節ロボットの下腕部または上腕部との干渉を回避する手段を備える。
(もっと読む)
ロボット
【課題】従来技術と同じようなサイズの部品を使用した場合でも、直動軸に懸架ユニットを懸架した構成において、全体の小形化を図ることができるロボットを提供する。
【解決手段】旋回ユニット3を構成する駆動部19を、直動軸4の側方においてケーブルベア15の曲面を持つ曲げ状態の曲げの内側に位置させてなるように旋回ユニット3に備えたので、駆動部19を、旋回ユニット3と連結された状態で直線移動するケーブルベア15の曲面を持つ曲げ状態の内側に位置するにしても何ら支障を生じることがない。これにより、ケーブルベア15の曲面を持つ曲げ状態の内側のデッドスペースを有効活用することができる。
(もっと読む)
吊り型ロボット
【課題】電源ケーブルや信号ケーブルを収納したケーブルベア(登録商標)がロボット本体の移動に伴って屈曲するとき、ケーブルどうしが互いに擦れあったり、ケーブルベアとケーブルとが擦れあったりすることを極力防止する。
【解決手段】複数のケーブルを上下に並列した状態で一体化してフラットケーブル29を構成し、このフラットケーブル29がケーブルベア22の外周側の側面に押し付けられ、且つ、フラットケーブル29のケーブルベア22への収納部分の両側を上方に傾けることによりフラットケーブル29がケーブルベア22の上下両内面から離れた状態に保持してフラットケーブル29の両端部を固定する。
(もっと読む)
マニピュレータおよびそれを複数備えたパワーアシスト装置
【課題】マニピュレータおよびそれを複数備えたパワーアシスト装置において、操作性の向上を図る。
【解決手段】パワーアシストアーム1は、動作部としての直動関節5と、回転関節6と、ハンド部8とを備えている。また、パワーアシストアーム1は、各動作部を操作する第1操作部11および第2操作部12と、直動関節5を駆動する直動関節駆動装置と、回転関節6を駆動する回転関節駆動装置と、ハンド部8を駆動するハンド部駆動装置とを備えている。第1操作部11はハンド部8から離れた位置にあり、第2操作部12はハンド部8に近接した位置に設置されている。パワーアシストアーム1は、直動関節5、回転関節6およびハンド部8の力覚を第1操作部11に提示する直動関節力覚提示装置、回転関節力覚提示装置およびハンド部力覚提示装置を備えている。
(もっと読む)
ロボットハンド
【課題】対象物のハンドリング性に優れたロボットハンドを提供する。
【解決手段】振動アクチュエータVにより回転子6を回転させて指部2を移動させ、指部2の互いに摩擦係数の異なる2つの物体接触面8及び9のうちの一方を対象物に接触させ、この状態で対象物をハンドリングする。振動アクチュエータVにより指部2がその中心を通る回転軸Rの周りに180度回転するように回転子6を回転させて2つの物体接触面8及び9のうち他方の物体接触面を対象物に対向させ、さらに指部2を移動させてこの他方の物体接触面を対象物に接触させることにより、摩擦係数の異なる他方の物体接触面で対象物がハンドリングされる。
(もっと読む)
作業用マニピュレータの制御装置
【課題】特異点に接近もしくは通過するような目標軌道を与えられた場合でも、計算上の破綻なく連続してマニピュレータを動作させて作業を続行可能とする。
【解決手段】作業用マニピュレータの制御装置は、目標値生成手段101、感度パラメータ計算手段103、対応感度計算手段105、複数の制御手段109〜113、制御方式切替手段107、及び外力検出手段を備える。感度パラメータ計算手段103はマニピュレータ機構からの関節変位応答を用いて感度パラメータを計算し、対応感度計算手段105は感度パラメータを用いて対応感度を計算し、制御方式切替手段107は対応感度に基づいて制御手段109〜113の切り替えを行う。各制御手段109〜113は、目標値、関節変位応答、外力検出手段で検出された外力、及び感度パラメータを用いて制御処理を行う。
(もっと読む)
アーム機構を備えた移動ロボット
【課題】 到達可能範囲を大きくでき、運搬・移動作業時に折り畳むことが可能な、出っ張りもなく収納が可能な安全性の高いアーム機構を備えた移動ロボットの提供。
【解決手段】 移動ロボットは、本体側面の第1関節で回動可能に軸支される第1アーム部101を備えている。第1アーム部には、収納用凹部及びこの収納用凹部に連通する開口部107を有し、この収納部に折り畳み機構が収納される。折り畳み機構では、第1アームに第2アーム部102が第2関節部を介して連結され、第3アーム部104が第2アーム部に第3関節部を介して連結されている。第1アーム部は、第1関節の周りに回動されてその開口部を任意の方向に向け、収納用凹部に沿って前記第2関節部をスライドさせて折り畳み機構を開口部から取り出すことができ、第3関節部の周りで前記第3アーム部を回動して第3アーム部を展開することができる。
(もっと読む)
搬送装置、搬送ロボット及びプレスライン
【課題】 搬送対象物の姿勢を自由に変更可能であり搬送対象物の搬送速度を向上させることができる搬送装置、搬送ロボット及びプレスラインを提供する。
【解決手段】 カム型3fのような障害物がプレス機械3に設置されている場合には、搬送対象物Wの姿勢を同一にして搬送すると搬送対象物Wがカム型3fと干渉して搬送対象物Wを搬送することができない。このため、先ず、スライド駆動モータがアーム部9を個別にスライドさせて、アーム部9をB1方向に前進させプレス機械3内でクランプ部8に搬送対象物Wを保持させる。その後に、搬送ロボット5のT軸駆動モータが駆動軸5mを回転させて、アーム部9と一体となってガイド部11をA方向に回転させるとともに、回転駆動モータがクランプ部8を個別に回転させて搬送対象物Wを回転させる。その結果、搬送対象物Wの姿勢が変化するため搬送対象物Wとカム型3fとの干渉が回避される。
(もっと読む)
1 - 20 / 22
[ Back to top ]