
Fターム[3C007CY29]の内容
マニピュレータ、ロボット (46,145) | 本体機構の目的 (1,591) | 防塵 (126) | カバーを設けるもの (69)
Fターム[3C007CY29]に分類される特許
1 - 20 / 69
基板搬送ロボット
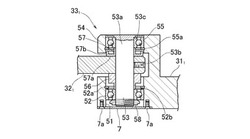
【課題】真空処理装置内で使用される基板搬送ロボットであって、ロボットアームの関節部は、一方のアーム部材に形成した上下方向に貫通する軸支孔と、軸支孔に装着したベアリングと、他方のアーム部材に固定した、ベアリングに挿入される支軸とを備えるものにおいて、ベアリングでの発塵で生ずるパーティクルによる真空処理装置内の汚損を防止できるようにする。
【解決手段】一方のアーム部材311の下面に、軸支孔51を下方から覆うカバー7が着脱自在に取り付けられる。また、支軸53が他方のアーム部材321上方に突出する上部軸部53aを有し、一方のアーム部材311に、上部軸部53aが挿入される上部ベアリング55を装着した筒部54を設ける場合には、上部ベアリング55の内輪と他方のアーム部材321との間に介設するカラー57の下端に、外周に立上り部57bを有するフランジ部57aを形成する。
(もっと読む)
ロボット

【課題】 可動部に設けられた押圧ローラおよび離間ローラの交換作業が容易になるロボットを提供すること。
【解決手段】 ロボットAに、開口15を備えたケース部材10と、開口15を塞ぐシャッタ50と、ケース部材10に移動可能に取り付けられたテーブル本体31と、テーブル本体31の移動方向の両側でシャッタ50を開口15の縁部側に押圧する押圧ローラ32aと、押圧ローラ32a間でシャッタ50を開口15の縁部から離間させる離間ローラ32bとを設けた。そして、テーブル本体31の一方側に設置される押圧ローラ32aと離間ローラ32bと、テーブル本体31の他方側に設置される押圧ローラ32aと離間ローラ32bとを一対の支持部材33で支持し、一対の支持部材33をそれぞれねじ37を用いてテーブル本体31の移動方向の一方側および他方側からテーブル本体31に対して着脱可能にした。
(もっと読む)
ロボットアーム装置
【課題】昇降部の上昇動作に伴って基台本体部内で舞い上がる粉塵が昇降部と基台本体部との隙間から上方へ放出されることを、ファンや排気口による排気機能や、シール部材によるシール機能に依存することなく、しかも昇降部の昇降速度を制限することなく、防止・抑制可能なロボットアーム装置を提供する。
【解決手段】アームを支持する基台を、基台本体部3と、基台本体部3の天井壁32に形成した開口部3aを通じて基台本体部3に対して昇降可能な昇降部4と、基台本体部3の内部空間3Sの上部及び下部に連通して内部空間3Sの空気を循環させる流路6とによって構成し、流路6のうち基台本体部3の内部空間3Sの上部に連通する上側流路口61の開口断面積を、天井壁32に形成した開口部3aと昇降部4との隙間の断面積よりも大きく設定した。
(もっと読む)
搬送装置
【課題】シートが伸びたことを検知し、作業者に報知することができる搬送装置を提供する。
【解決手段】搬送装置1は、直動装置を構成するレール10及びスライダ20と、スライドユニット30と、可撓性のシートとを有する。スライドユニット30は、その移動方向に沿って、シートを収容し、スライドベース31と、方向転換部とを有する。スライドユニット30には、シートが所定の長さ以上の伸びを発現したときに該シートの過剰な伸びを作業者に報知する報知手段が設けられている。
(もっと読む)
搬送装置
【課題】シートの交換作業を容易に行うことができる搬送装置を提供する。
【解決手段】搬送装置1は、直動装置を構成するレール10及びスライダ20と、スライドユニット30と、これらの上面を覆う防塵用の可撓性のシートとを有する。スライドユニット30は、スライドベース31と、その移動方向に沿って防塵用のシートを収容し、シートの方向を転換するためのローラからなる第1の方向転換部41と第2の方向転換部42とを有する。スライドベース31には、それぞれシートに向かって開口し第1の方向転換部材を支持する第1の支持部31cと、第2の方向転換部材を支持する第2の支持部32cが形成される。第1の方向転換部材41及び第2の方向転換部材42は、第1の支持部31cと第2の支持部32cに容易に着脱可能に嵌合する。これによって、スライドベース31上にワークや工具などが搭載されていても、シートの交換が容易である。
(もっと読む)
ロボット
【課題】 ケース部材の開口縁部とシャッタとの隙間からケース部材の内部に塵埃や異物が浸入することを防止できるロボットを提供すること。
【解決手段】 軸方向に沿う一面が開口したケース部材10と、ケース部材10の軸方向に移動可能な状態でケース部材10に取り付けられた可動部材20と、可動部材20を移動させる駆動装置40と、ケース部材10の開口15を塞ぎ可動部材20に位置する部分が開口15の縁部から離間されるシャッタ50とを備えたロボットAを構成した。そして、可動部材20の移動方向の両端に、シャッタ50の外面と開口15の縁部とに接触するワイパ34を着脱可能に設けた。ワイパ34の可動部材20への取り付けを、可動部材20に係合部36を設けるとともに、ワイパ34に被係合部37を設けて、ワイパ34を係合部36に対してスライドさせることにより行った。
(もっと読む)
塗装ロボット用保護カバー
【課題】 塗料ミストなどの吸着性に優れ、かつ塗装ロボット動作時に破れることがない塗装ロボット用保護カバーを提供する。
【解決手段】 塗装ロボット用保護カバーは、合成樹脂からなるフィラメント糸をニット編みしてなる伸縮可能な編物地に、半固体状組成物を含浸させて付着させてなる。半固体状組成物は、ペトロラタム、又はペトロラタムとポリエチレングリコールとの混合物からなるとよい。保護カバー1は、例えば、塗装ロボット2のアーム部21や、塗装ガン22などを被覆する。
(もっと読む)
発塵防止機構を備えた基板搬送装置
【課題】直線的に移動する部材を有するリニア軸においてその近傍からファンを無くすとともに、リニア軸の近傍からファンを廃止しても発塵を防止することができる機構と、それを備えた基板搬送装置を提供すること。
【解決手段】発塵防止機構を、ベース部材134においてスライド部材107の進退方向の前端部分および後端部分に形成された前端開口および後端開口155と、ベース部材134において前端開口と後端開口との間に形成された中央開口156と、前端開口と後端開口との間にあって中央開口156を覆うように設置され、前端と後端とが前端開口と後端開口とにそれぞれ到達する内部カバー171と、前端開口および後端開口をそれぞれ覆う補助カバー172と、によって構成し、スライド部材によるポンプ作用を発生させる。
(もっと読む)
一軸ロボット
【課題】スライダ30が特定の範囲で移動と停止を繰り返し、同じ位置に頻繁に停止することがあったとしても、当該停止位置で塵埃がこびりつく等の不具合を防止する。
【解決手段】略直方体形状の外殻を有する中空のケーシング11の上面に配置されたスライダ30と、前記ケーシング11に設けられ、且つ前記ケーシング11の上面に形成された開口部17を介して前記スライダ30を前記ケーシング11の長手方向に往復移動させる駆動機構と、前記ケーシング11の開口部17を遮蔽するように前記スライダ30を貫通する平板状のシャッタ40と、前記スライダ30の移動方向両側に設けられ、前記シャッタ40の上面と非接触状態で前記シャッタ40下面を吸引することにより、当該スライダ30の両側での前記シャッタ40の浮きを規制する一対の吸引手段34とを備えている。
(もっと読む)
スカラーロボット
【課題】上下軸の雰囲気と外環境とをジャバラにより隔離して当該雰囲気の外環境への流
出を抑制する上下軸を、ジャバラによる隔離を維持しつつ、より高速な上下動に対応させ
ることのできるスカラーロボットを提供する。
【解決手段】スカラーロボットには、支持軸14に回動可能に設けられた第2のアーム1
5に、第2のアーム15に貫通支持して第2のアーム15に対して少なくとも軸線方向に
移動させる上下回転軸16と、上下回転軸16を外環境と隔離させるジャバラ19,20
とが設けられている。上下回転軸16の下端部17と第2のアーム15の下部との間に設
けられる下側ジャバラ20内の雰囲気を、上下回転軸16の上昇に伴い下側ジャバラ20
が収縮するとき下側ジャバラ20の外環境に流出させずに第2のアーム15の内部に流入
させるように下側ジャバラ20内と第2のアーム15内とを連通させる連通路30を備え
る。
(もっと読む)
スカラロボットのアームカバー
【課題】アームカバーの取り付け、取り外しに複数個の固定用ボルトのため面倒な作業であり、経年変化によりボルトが落下するという欠点を解消し、取り付け、取り外しが容易なアームカバーを提供すること。
【解決手段】スカラロボットのアームカバー10において、ロボットアームの縁部に全周に亘りガイドを設け、アームカバーの弾性変形によりこのガイドに沿ってアームカバー底部を嵌め込むとともに、カバー上面からアームに固定されたブラケット13にボルト14により固定するようにした。
(もっと読む)
搬送装置
【課題】シートの交換作業を容易に行うことができる搬送装置を提供する。
【解決手段】搬送装置1は、直動装置2と、スライドユニット3と、可撓性のシート5とを備える。直動装置2は、レール10とスライドベース31とを有する。スライドユニット3は、その移動方向に沿って、シート5を収容し、スライドベース31と、該スライドベース31の移動方向の両端部に着脱可能に設けられたガイドロール支持ブロック32と、方向転換部4とを有する。方向転換部4は、第1の方向転換部材41と第2の方向転換部材42とを有する。第1の方向転換部材41は、スライドベース31に複数設けられ、シート5の下面を上方に押し上げて張架する。ガイドロール支持ブロック32に設けられた第2の方向転換部材42によって上面を押さえつけられたシート5は、開口部11を覆うよう案内される。
(もっと読む)
線状対象物の配管・配線構造、ロボットの作業ヘッドおよび多関節ロボット
【課題】本発明は、特別な配管・配線スペースを必要とすることなく、正逆回転する中空作動軸に挿通した線状対象物の破損を有効に防止することができる線状対象物の配管・配線構造、ロボットの作業ヘッドおよび多関節ロボットを提供することである。
【解決手段】チューブ17およびケーブル16の少なくとも一方であるケーブル類18を、軸線周りに所定の角度正逆回転する中空作動軸12の中空部に挿通すると共に、中空作動軸12の一方の軸端側において回転不能となるように相対的に固定とし、他方の軸端側において中空作動軸12と同期回転するように相対的に可動としたケーブル類18の配管・配線構造であって、中空作動軸12の内壁とケーブル類18との間に介設され、ケーブル類18を囲繞するように保持すると共に、軸線周りに捻り変形自在な筒状プロテクター61を備えたものである。
(もっと読む)
ロボットの防塵構造およびそれを備えたロボット
【課題】産業用ロボットの内部で発生する粉塵の拡散を防止する。
【解決手段】ロボットのハンドを有する作業軸30およびその周辺から発生する塵の拡散を防止する防塵構造60であって、蛇腹部65と前記蛇腹部65の両端にストレート部66a,66bとを有し、前記蛇腹部65で前記作業軸30を覆う蛇腹ホース62と、前記ストレート部66a,66bが嵌合する接続部を有し、前記作業軸30の軸線に沿って所定の間隔を空けて配置された2つのホース固定部61,63とを備え、前記ホース固定部61,63では、弾性部材68,69を介してクランプ材70,71で前記蛇腹ホース62の前記ストレート部66a,66bを前記接続部に締め付けることによって固定する。前記ストレート部66a,66bは、前記クランプ材70,71による締め付けに対して浮きを低減させるため、ストレート部の円周方向に沿って複数形成された薄肉部からなる緩衝部を有している。
(もっと読む)
ロボットのアームカバー
【課題】ロボットのアームにボルトで固定されるアームカバーにおいて、水捌けが良く、しかも、布でアームカバーの外表面をさっと拭いた場合に、布がボルトの頭部に引っ掛からないようにする。
【解決手段】アームカバーのカバー本体10の外表面を中央部分から周縁部分に向かって傾斜するように円弧状に形成する。カバー本体の周縁部分に、カバー本体の周縁において外方に開放された座ぐり部11を形成し、この座ぐり部11の底面にボルト9の通し孔17を形成する。座ぐり部11の深さを、ボルト9の頭部9aが、座ぐり部11の両側に存在するカバー本体10の外表面を結ぶ直線L1よりも低くなるように設定する。
(もっと読む)
ロボットのアームカバーの製造方法
【課題】アルミにより型成形されたアームカバーの表面に、高い防錆効果を有する防錆被膜を形成する
【解決手段】砂型を用いたアルミの型成形により形成されたアームカバーの表面のうち、アームへの接合面を切削加工した後、陽極酸化処理時を行う。切削加工により接合面の表層に存在するチル層や砂粒子による細かい凹凸が除去された状態で、陽極酸化処理が行われることとなるので、印加電圧と電圧印加時間とを管理することで、防錆効果のある所望の厚さの陽極酸化処理被膜を、接合面全体に厚さ均一の状態に形成でき。また、アームカバーの接合面以外の表面のうち、アームの外表面となる外側表面に、塗装を施して適度な厚さの塗料被膜を形成する
(もっと読む)
ロボットのアームの端部カバー
【課題】上下回動するアームに固定する端部カバーにおいて、水捌けが良く、布で端部カバーの外表面を拭いた場合に、固定用のボルトの頭部に布が引っ掛かることを防止する。
【解決手段】角型容器状のカバー本体9の4稜角部に溝状隠し凹部12を形成し、カバー本体9の上下の周側面10a,10bを周方向に対して円弧凸面状をなすように形成し、閉塞端面11をほぼドーム状に形成する。これによりカバー本体9の外表面からの水捌け性が良くなる。溝状隠し凹部12の2つの壁面14,15は傾斜し、ボルトの通し孔18は、据え付け座面13の対角線上に存在し、且つ据え付け座面13の2つの壁面14,15に向かう方向の寸法は、ボルトの六角頭と2つの壁面14,15との間の距離がワッシャを含む六角頭の高さ以上となる寸法に設定する。
(もっと読む)
ロボットの手首装置
【課題】モータの回転をフランジ(エンドエフェクタ取付部材)に減速して伝達する減速装置を対象として当該減速装置の密閉空間内の潤滑剤が外部に漏れ出ることを防止する。
【解決手段】手首回転部3のハウジング5の互いに90度異なる2面5a,5bに、フランジ4用の第1減速装置7と手首回転部3用の第2減速装置8を設け、フランジ4駆動用のモータ6を手首回転部3のハウジング5に設けたものにおいて、第1減速装置7の第1密閉空間32と第2減速装置8の第2密閉空間57との間を連通する連通路65を形成したので、第1密閉空間32の圧力が高くなると、第1密閉空間32内の空気が連通路65を通じて第2密閉空間57へと流れ、第1密閉空間32の異常な圧力上昇が防止される。
(もっと読む)
スカラロボット
【課題】水などの液体や塵埃が飛散する環境下で使用しても動作不良などを起こすことを抑制することのできるスカラロボットを提供する。
【解決手段】第2のアーム5に形成されたスプラインシャフト貫通部14を貫通して上方に突出するボールねじスプラインシャフト6の上端部に接続された延長シャフト17の上端部に、ボールねじスプラインシャフト6の軸方向に伸縮自在な蛇腹状カバー部材18の一端部18aをベアリング19を介して締着する。また、蛇腹状カバー部材18の他端部18bをスプラインシャフト貫通部14に延長シャフト17及びボールねじシャフト6を内包するように締着する。
(もっと読む)
作業ロボット用保護カバー
【課題】作業用ロボットへの装着が容易であり、汚れの度合いに合わせて部分的に交換することができ経済的である作業ロボット用保護カバーを提供する。
【解決手段】作業ロボット90の固定部及び可動部の各部分を覆う形状に形成された編み物の覆い布12,14,16,18を備え、この覆い布12,14,16,18は作業ロボット90の関節部分等の各部位で区切られて複数形成されている。各覆い布12,14,16,18が、作業ロボット90の各関節間に位置して、関節部分毎に被覆する。覆い布12,14,16,18には、撥水撥油性、伸縮性及び防炎性のあるフィルムがラミネートされている。
(もっと読む)
1 - 20 / 69
[ Back to top ]