
Fターム[3C007FT16]の内容
マニピュレータ、ロボット (46,145) | 吸着部の構造 (500) | 浮動するもの (104) | 可撓性部材によるもの (23)
Fターム[3C007FT16]に分類される特許
1 - 20 / 23
シート取出装置
【課題】シートの特性によらずに広く適用でき、シートの重搬送を抑制することができるシート取出装置の提供。
【解決手段】シートSを重ねて複数枚収容する収容部2からシートSを取り出すシート取出装置1であって、収容部2には、シートSが、その直下のシートSに支持される支持部s1と、その直下のシートSに支持されない非支持部s2とを有するようにして重ねて収容されており、少なくとも非支持部s2を保持して上記取り出しを行うハンド装置3を有するという構成を採用する。
(もっと読む)
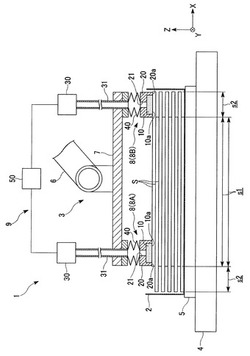
真空吸着装置

【課題】薄物のワークの局所変形を抑制しつつ、ワークを取り出す際の撓みを許容できる真空吸着装置の提供。
【解決手段】吸着面10aを有する多孔質体10と、吸着面10aの周囲を気密に閉塞して多孔質体10を保持するホルダ20と、吸着面10aから吸引を行う吸引装置30と、ホルダ20を支持し、吸着面10aの水平面に対する傾きを変位自在とするベローズ管40と、を有する真空吸着装置1を採用する。
(もっと読む)
形状自在な吸着パッド
【課題】吸盤を用いてワークを把持する吸着パッドを用いて把持を行う際に、吸着力の不足により把持が不完全な状態になることや把持ができても移動する際に落下することを防止する。
【解決手段】ワークを把持する吸着パットであって、ワークの一方向に位置する固定部材11と、固定部材11のワークに対向する面に密着して取り付けられた中央に減圧空間17を有する形状自在パッド12と、減圧空間17内の圧力を所定負圧に減圧しかつ大気圧に戻すことができる減圧装置と、を備える。さらに、形状自在パッド12は、ワークの固定部材11に対向する面に対して押し付ける押付力によりワークの表面形状をならうようになっている。
(もっと読む)
回転板位置調整装置及び方法
【課題】構造が簡易で、回転板の微小変位に対応可能な、回転板位置調整装置及び方法を提供する。
【解決手段】吸着搬送装置51と認識カメラ7と制御装置10とを備えた回転板位置調整装置50において、上記吸着搬送装置に備わり回転板2の吸着動作を行う吸着ヘッド1は、ヘッド本体101と、上記回転板を吸着する金属製の吸着パッド102と、上記ヘッド本体と上記吸着パッドとを接合し、かつ上記回転板の姿勢に上記吸着パッドが倣うように変形する接着部103とを備えた。
(もっと読む)
ロボットハンド及び搬送ロボット
【課題】被搬送物Wがロボットハンド9から落下することを回避して、被搬送物Wの搬送作業の煩雑化を十分に抑えること。
【解決手段】ハンド本体11に設けられかつ真空圧を利用して被搬送物を吸着する複数のベローズ型吸着パッド19と、吸着状態における各ベローズ型吸着パッド19の軸長を測定する軸長センサ29と、各軸長センサ29から測定された各ベローズ型吸着パット19の軸長に基づいて、搬送中における被搬送物Wの姿勢を判定するコントローラ31と、を備えたこと。
(もっと読む)
ベローズ型吸着パッド、ロボットハンド、及び搬送ロボット
【課題】ベローズ型吸着パッド19による吸着状態の安定化を図りつつ、ベローズ型吸着パッド19の吸着力を向上させること。
【解決手段】パッド本体27にベローズ31が一体形成され、ベローズ31は、径方向外側へ突出した複数の山部33と径方向内側に窪んだ複数の谷部35を交互に有し、パッド本体27の軸心方向へ伸縮可能であって、ベローズ31の内部がパッド本体27の接続孔29に連通し、ベローズ31の各山部33の内側にワッシャ39が密着して配設されたこと。
(もっと読む)
基板吸着装置
【課題】Wet処理装置(洗浄装置あるいは現像装置等液体を用いるプロセス処理機)内の基板搬送にも適用可能で、配管系の不要なコンパクトな基板吸着装置の提供を目的とした。
【解決手段】少なくとも、基板を気密に吸着するためのラッパ状の吸着口を備えるゴムパッド8と、前記ゴムパッドの基部を膜保持ハウジング30を介して気密に被覆するダイアフラム膜7と、前記ダイアフラム膜7を変形させるための圧力制御ブロック3と、を有することを特徴とする基板吸着装置である。
(もっと読む)
吸着装置及び搬送装置
【課題】高温環境下において、複数の吸着部材の吸着面高さを容易に一致させて精度よく保持すること、及び被搬送物とは反対の方向に負荷が加えられた場合には容易に十分な変位を生じて負荷の加えられた吸着部材のみを容易に一時的に吸着から離脱可能な吸着装置を提供する。
【解決手段】本発明の吸着装置は、複数の吸着部材40を備え、当該吸着部材における吸着面41に被搬送物2を吸着して保持し、ベース部材20と、当該ベース部材上に設けられ、且つ上記ベース部材20に保持される板状保持部材30とを備え、上記吸着部材40は、吸着時にかかる圧力に耐える剛性を有し、板状保持部材30に保持され、その吸着面41が、ベース部材20における板状保持部材30が設けられている側の面とは反対側の面側に位置し、ベース部材20における板状保持部材30が設けられている側へ当該板状保持部材30の弾性変形により変位可能であることを特徴とする。
(もっと読む)
真空吸着パッド
【課題】板状のワークを搬送する際に、その吸着面に凹凸があった場合でも、その凹凸を吸収し、かつワークの湾曲または偏角にも対応して吸着することのできる真空パッドを提供する。
【解決手段】蛇腹状のスカート部2の一端部2cに、このスカート部2内を真空にする真空装置からのパイプ9が接続された基部1が気密的に設けられ、蛇腹状のスカート部2内の大径部2aに、少なくとも一つ以上の貫通穴3bが形成された円板状の固定板3が設けられ、蛇腹状のスカート部2の大径部2aからなる他端部2dに、他端部2dと当接するとともに、少なくとも一つ以上の貫通穴4cが形成された軟質ゴムよりなる円板状のエッジホルダ4が設けられ、エッジホルダ4と固定板3とが一体的に形成されるとともに、エッジホルダ4の外装面4aには、エッジホルダ4よりも軟らかい軟質ゴムより形成されて平面上のワークの板面に当接する環状のエッジ部5が気密的に設けられている。
(もっと読む)
ロボットハンド
【課題】ワークの横ズレや傾きによる位置ズレの発生がなく、確実にワークを保持、固定でき、また多種多様な形状、大きさのワークに対応でき、さらにワークの保持位置の自由度が高く、汎用性に優れたロボットハンドを提供する
【解決手段】ロボットアームの先端に取り付けられ、ワーク6を保持するためのロボットハンド1であって、ワーク面の形状に追従可能なベローズ式吸着パッド2と、ベローズ式吸着パッドの内側に配置され、ベローズ式吸着パッドとともにワークを保持、固定するための高硬度吸着パッド3と、ベローズ式吸着パッドの外側に配置され、ワークの傾きを固定するための固定ロッド4とからなる。固定ロッドはシャフト4aとシャフトの先端に取り付けられたワーク押さえ部4bとからなり、固定ロッドの先端に位置決めピン7が取り付けられていてもよい。
(もっと読む)
保持装置および保持装置を有する搬送装置
【課題】被搬送物を着脱自在に確実にかつ安定して吸着して保持する保持装置を提供する
こと。
【解決手段】基部に配置されて第1通路111Aを有する継手部111と、第2通路11
3Aを有し第1通路111Aと第2通路113Aを通じて吸引することで被搬送物Dを保
持するノズル先端部113と、ノズル先端部113と継手部111を接続する伸縮自在な
胴体部114であり、第2通路113Aと第1通路111Aとを連絡する胴体部114と
、ノズル先端部113と継手部111の間に配置されてノズル先端部113を継手部11
1から離れる方向に沿って付勢するための付勢部材と、基部に対して固定されている受け
部116でありノズル先端部113が被搬送物Dを吸着する時にノズル先端部113を付
勢部材115の力に抗してノズル先端部113の軸方向に移動する際にノズル先端部11
3を案内する案内孔を有する受け部116を備える。
(もっと読む)
吸着パッド、搬送装置、及び搬送方法
【課題】高温のワークの吸着に適した吸着パッドを提供する。
【解決手段】吸着パッド35は、ゴム管41とワーク吸着部42とからなり、エアの吸引口33が開口したロボットアーム31の先端に接続され、吸引口33からのエア吸引によりレンズ21の上面を吸着して保持する。ゴム管41は、ロボットアーム31の先端に根元側が接続され、吸引口33に連通する吸引路36が内部に菅ついして形成されており、可撓性を有する。ワーク吸着部42は、ガラス転位点Tgが130℃以上の耐熱性樹脂からなり、ゴム管41の先端側に設けられ、吸引路36に連通してレンズ21の上面を吸着する吸着口43を有するとともに、ゴム管41よりも高い耐熱性を持つ。
(もっと読む)
基板吸着装置及び基板搬送装置並びに外観検査装置
【課題】基板にかかる応力を抑制しつつ確実に吸着保持できるようにする。
【解決手段】外観検査装置1は、基板吸着装置として板金15に固定された3つの吸着部群16A〜16Cを備える。吸着部群16A〜16Cはガラス基板Wの搬送方向に並んで配置されており、各々が3つの吸着部18A〜18Cを備える。吸着部18A〜18Cは、ガラス基板Wの裏面に吸着可能で、首振り動作が可能な吸着パッド22が1つずつ設けられている。最も中央にある吸着部群16Bの吸着部18Bは、上方に押し付け部33が配置されている。押し付け部33は補助パッド35を降下させてガラス基板Wを吸着部18Bに押し付ける。
(もっと読む)
基板ハンドリング装置、基板搭載方法、基板取出方法
【課題】基板搬送装置への基板の搭載および取り外しを自動化することのできる基板ハンドリング装置、基板搭載方法、基板取り出し方法を提供する。
【解決手段】ロボットアームの先端に取り付けられる基板ハンドリング装置であって、ロボットアームに取り付けられた板状保持部材と、板状保持部材に基板保持方向に突出可能に軸支され、先端に基板吸着パッド部15を備えた基板保持アーム16と、基板保持アーム16を板状保持部材から突出しない状態で固定するロック機構と、基板吸着パッド部15を基板保持アーム16から突出する方向に付勢する突出機構18と、基板吸着パッド部15の基板保持アーム16からの突出を制限する吸着パッド部24とを備えた。
(もっと読む)
ワークの吸着装置
【課題】 ホルダとスライダ間の生じる真空リークを防止し、スライダの円滑なスライド動作を確実に行なうことができるワークの吸着装置を提供する。
【解決手段】 基端外周部にフランジ11gを突設させたスライダ本体11bに、段部11cを介して小径部11dを一体的に形成し、かつ真空吸引用の通路11aを上下に開口させたスライダ11を形成し、スライダ本体11bの外周部に、弾性を有する中空円筒状のシース13を、隙間を存して嵌め込み、スライダ本体11bの小径部11dをホルダ12に挿通させ、前記小径部11dの先端部をホルダ12の先端部から突出させた状態で、スライダ11をホルダ12に対してスライド可能に保持し、前記シース13の先端面を、ホルダ12の基端開口面に、基端面をスライダ11のフランジ11f上面にそれぞれ密着係合さてワークの吸着装置とする。
(もっと読む)
ロボットハンド吸着装置
【課題】 従来のロボットハンドの吸着装置に在った吸着パッドの吸着面積を大きくすることに対する不都合さ、および部品が多く、装置の複雑化、製作コストのアップ等の欠点を取除いたロボットハンドの吸着装置を提供することにある。
【解決手段】 内部が中空で角形の筒状をしたロボットハンドの中空内に取付けられ、真空用の配管に繋がった孔を設けたブロックと、このブロックの真空用配管に繋がった孔に連通する真空孔を有し、搬送物を吸引するロボットハンドの吸着パッドと、吸着パッドとブロックの間に設けられ、吸着パッドの真空孔とブロックにある真空用の配管に繋がった孔とを連通させる可撓性の筒状の継手と、吸着パッドがロボットハンドの表面より予め定められた寸法以内に保持されよう吸着パッドを押えるロボットハンドの搬送物に面した部材とを有して成るロボットハンドの吸着装置。
(もっと読む)
真空吸着パッド
【課題】パッド部材と蛇腹部材との間の密着性を安定に維持でき、パッド部材の交換も可能な真空吸着パッドを提供する。
【解決手段】本発明に係る真空吸着パッド11は、内部に排気通路12が形成されたベース部材13と、ベース部材13と一体的に取り付けられ内部が排気通路13と連通する蛇腹部材14と、蛇腹部材14の先端14bに取り付けられ吸着孔15aを有するパッド部材15とを備え、パッド部材15は、蛇腹部材14の先端14bに嵌入され内部に吸着孔15aが形成された嵌入軸部15bを有するとともに、蛇腹部材14の先端14bには、嵌入軸部15bとの間の密着状態を保持する環状弾性部材17が装着されている。
(もっと読む)
基板吸着装置、基板支持体、基板搬送装置、およびガラス基板搬送用ロボット。
【課題】ガラス基板に大きな反り(撓み)があっても基板の反りに合わせて、確実に吸引できる基板吸着装置と、それを用いたガラス基板搬送用ロボットを提供する。
【解決手段】上部周囲に360度に亘る周縁凸部23aを設けると共に上部中央から下方に貫通する吸気貫通孔23cを設けた吸引パッド23と、中央部に設けた凹部21aと該凹部21aの底部中央から外部に通じる吸気通路21c、21dとを有するパッド座21と、吸引パッド23とパッド座21との間に介在するクッション材として蛇腹状をした弾性パッド支持体22を用い、さらに、吸引パッド23に支点となる支点軸23bを設け、支点軸23bがはまる溝の深さをパッド押さえ24で変えるようにした。
(もっと読む)
保持装置および保持装置を有する搬送装置
【課題】被搬送物を着脱自在に確実にかつ安定して吸着して保持する保持装置を提供すること。
【解決手段】基部に配置されて第1通路111Aを有する継手部111と、第2通路113Aを有し第1通路111Aと第2通路113Aを通じて吸引することで被搬送物Dを保持するノズル先端部113と、ノズル先端部113と継手部111を接続する伸縮自在な胴体部114であり、第2通路113Aと第1通路111Aとを連絡する胴体部114と、ノズル先端部113と継手部111の間に配置されてノズル先端部113を継手部111から離れる方向に沿って付勢するための付勢部材と、基部に対して固定されている受け部116でありノズル先端部113が被搬送物Dを吸着する時にノズル先端部113を付勢部材115の力に抗してノズル先端部113の軸方向に移動する際にノズル先端部113を案内する案内孔を有する受け部116を備える。
(もっと読む)
保持装置
【課題】吸着し保持する対象物を開放するとともに伸縮可能でチャック装置との干渉を避けることができる保持装置を提供する。
【解決手段】伸縮型保持装置10は、流体を独立して導入排出可能な帯状の管であって一体的に形成された第1変形部2a、第2変形部2b、第3変形部2c及び第4変形部2dと、各変形部に密着かつ固定されて板状に形成された真空排気可能な帯状の管で吸着穴5を有する保持部6とを備え、各変形部と保持部6とが密接する箇所に、形状維持用スプリング8a、8b、8c、8dが設けられている。保持部6を真空排気して基板を吸着保持し、各変形部に充填した流体を排出して流体圧をゼロにしていくと形状維持用スプリング8a、8b、8c、8dの自然状態の形状に変形していき、保持装置の先端が曲がり、チャック装置との干渉を避けることができる。可変ステージ及び可変ハンドとして使用可能である。
(もっと読む)
1 - 20 / 23
[ Back to top ]