
Fターム[3C007HT02]の内容
マニピュレータ、ロボット (46,145) | 伝動装置(挟持装置は除く) (1,840) | 可撓性部材 (556) | ベルト (274)
Fターム[3C007HT02]に分類される特許
261 - 274 / 274
曲面顔画像表示を用いたコミュニケーションロボット

【課題】豊かで親和性の高い表情を表出するためのロボットを提供する。
【解決手段】顔に相当する部位において感情状態に基づいて生成された表情を曲面ディスプレイ上に画像として表示させる表情表示手段と、表情の一部として首の運動も含めるために画像表示機と運動機構を一体化した機構と、その手段・機構における表情画像作成手段、また表情を自動的に生成する手段から成る。
(もっと読む)
位置決めユニット及びこれを用いた位置決めアーム
例えば内視鏡を用いた外科手術において、手術用具を挿入するために人体に開設した穴を押し拡げることなく、かかる手術用具の先端を体内において処置が必要な部位へ位置決めするユニットを提供する。このユニットは手術用具等の可動部材に対して枢動自在に接続されると共に互いに平行に且つ往復動自在に設けられた第1及び第2の出力軸と、この第1の出力軸に対して任意の進退量を与えると共に、前記第2の出力軸に対しては第1の出力軸の進退量と常に一定比率(≠1)の進退量を与える駆動手段とから構成されている。 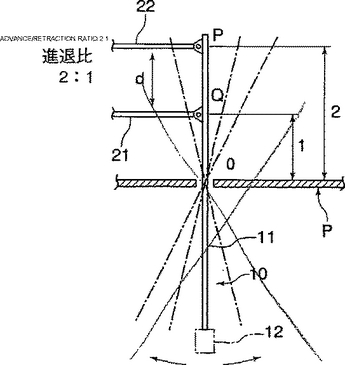 (もっと読む)
(もっと読む)
アクチュエータ

本発明は、アクチュエータに関し、特にロボットアームの制御に用いられる直動式アクチュエータおよび回転式アクチュエータに関する。本発明は、実質的にバックラッシュの無い回転運動および/または直線運動を達成する比較的に低コストの手段を提供するものである。本発明で提供するアクチュエータ(10)は、第一の駆動プーリ(28)と、第二の駆動プーリ(29)と、第一の被駆動プーリ(52、70)と、第二の被駆動プーリ(53、72)と、第一の駆動プーリ、第二の駆動プーリ、第一の被駆動プーリおよび第二の被駆動プーリと係合する無端駆動ベルト(40)と、第一の駆動プーリおよび第二の駆動プーリを駆動して無端状駆動ベルトを回転および駆動させるために連結されているモータ(19)と、被駆動プーリのうちの少なくとも一つを支持している被駆動部材(50、88、71、73)とを備えており、第一の駆動プーリおよび第二の駆動プーリが、一緒に回転するように相互に接続され、回転時には、第一の駆動プーリの周速度が第二の駆動プーリの周速度と異なるように配設され、無端ベルトが、第一の駆動プーリの周速度と第二の駆動プーリの周速度との間の差が被駆動部材に動きを生じさせるように、駆動プーリおよび被駆動プーリのまわりに巻き付けられている。 (もっと読む)
トランスファロボット
【課題】 ワーク搬送システムのスケールダウンおよび装置の小型化を図ることができ、かつ、ゴミなどの付着を防止しつつワークをスムーズに受け渡しすることができるトランスファロボットを提供する。
【解決手段】 トランスファロボットA1は、上下方向に開放したオープンスペース40をもつフレーム部材4と、オープンスペース40を跨いでフレーム部材4に梁状に設けられているとともに、ワークWの下面を支持しながら水平方向に伸縮する複数のスライドアーム機構5と、複数のスライドアーム機構5と上下方向に干渉することなくオープンスペース40内に収まるように設けられているとともに、フレーム部材4が下降移動して所定の位置にある状態では、相対的にオープンスペース40よりも上方に位置し、その際、ワークWを空気圧により浮上させて保持するエアベントステージ6とを備えている。
(もっと読む)
歩行ロボットの脚関節軸駆動機構
【課題】使用目的や稼動条件の変更に伴う駆動モータや伝動機構の交換を容易に行い得るようにすることにある。
【解決手段】歩行ロボットの脚構成リンク4を揺動させる脚関節軸9を駆動する駆動機構11において、前記脚関節軸9を伝動機構13を介して駆動する駆動モータ12と、前記駆動モータを固定支持するモータブラケット19と、前記脚構成リンクに設けられ、前記駆動モ−タを固定支持した前記モータブラケットを搭載位置変更可能に搭載するブラケット搭載部20と、前記ブラケット搭載部に前記モータブラケットを着脱可能に固定するブラケット固定手段21と、を具えてなる、歩行ロボットの脚関節軸駆動機構である。
(もっと読む)
駆動装置及びその駆動方法
【課題】 オープンループ制御により、精確な動作が可能な駆動装置及び駆動装置の制御方法を提供する。
【解決手段】 駆動制御部10から出力される制御信号に基づいて、ドライバ11から所定の駆動信号が出力されて駆動源15を動作させる。駆動制御部10による制御動作が終了すると、振動制御部12が駆動源を一定期間に正逆方向に交互に駆動させるような駆動制御信号を発生する。これにより駆動源15は微振動する。駆動源の微振動による駆動力方向の力が、摩擦力等の負荷により抑制され最後まで動作できずに残存している駆動力と合算されて、駆動方向の力が摩擦等の負荷よりも大きくなると、動作部は残存駆動力に応じた距離だけ移動する。これにより、駆動制御部10の制御信号に基づく動作が精確に実行される。
(もっと読む)
搬送装置及びその制御方法並びに真空処理装置
【課題】回転用モータの回転駆動力を搬送用アームに正しく伝達させるとともに回転駆動軸の回転角度を正確に検出することにより、搬送部における搬送対象物を正しい位置に搬送可能な搬送装置を提供する。
【解決手段】本発明の搬送装置1は、気密構造を有するハウジング61内に、所定の同心回転軸を中心として互いに独立して回動可能に構成された第1〜第3駆動軸1a〜1cと、第1〜第3駆動軸1a〜1cの所定の部位にそれぞれ取り付けられた永久磁石32a〜32cと、永久磁石32a〜32cと対応して設けられた電磁コイル34a〜34cとが配設されている。電磁コイル34a〜34cに対し所定の情報に基づいて駆動電流を供給して第1〜第3駆動軸1a〜1cを駆動し、第1〜第3駆動軸1a〜1cに固定された第1及び第2リンケージ12a、12bによって搬送対象物を搬送する。
(もっと読む)
ロボットの手首装置
【課題】回転軸および直交する2つの回転軸の計3軸を持つロボットの手首装置について、ケーブル配線も含めて、小型で、特に、手首軸径寸法が小さく、外観上もスマートな手首装置を提供する。
【解決手段】中空構造のアクチュエータ、駆動モータ、減速機、プーリ、ベルトなどの構成要素を最適に配置し、軸動作に伴うケーブル可動領域が小さい経路にケーブルを配線し、ケーブルのクランプおよびガイドの役割を果たす外形が円形あるいは球形のフレームやカバーを採用する。
(もっと読む)
基板搬送装置
【課題】 本発明は搬送構造を改善した基板搬送装置を提供する。
【解決手段】 本発明による基板搬送装置は、ベース部20と;ベース部20上に直線運動ができるように設置されて、回転体32が備わっている運動部30と;運動部30の両側に並立設置されて、高さ調節が可能な一対のフレーム部40a、40bと;一対のフレーム部40a、40bの間に連結されて、フレーム部40の高さ調節動作に連動して、上下直線運動する搬送部50と;を含んで構成される。これにより、構造的な安全性を確保した状態で、簡便で精密に基板、特に大型基板を搬送させることが可能になる。
(もっと読む)
二重スカラアーム
基板搬送装置は駆動セクションと該駆動セクションに作動自在に結合されたスカラアームとを有し、該駆動セクションは該スカラアームを作動する。該スカラアームは上方アームと少なくとも1つの前方アームとを有している。該前方アームは該上方アームに作動自在に搭載されてその上に基板を保持することが可能である。該上方アームは実質的に剛性であって該上方アームの所定の形態の変更を調整することが可能である。  (もっと読む)
(もっと読む)
ワークハンドリング装置
本発明のフークハンドリング装置は、ワークを載せるトレイを担持すると共に所定方向に往復動自在な可動テーブル(21)、ワークに対して所定の処理を施す処理部(30)を略中央に挟むようにしてトレイと処理部との間で往復動自在に配置され,かつ,ワークを搬送するべく水平方向及び鉛直方向に駆動される関節型アーム(410)及びその先端に設けら
れた複数の吸着ヘッド(420)をそれぞれ有する一対のハンドラ(40,40’)、一対のハンドラ及び可動テーブルを駆動制御する制御ユニット(70)を備え、制御ユニットは、トレイから処理部への未処理ワークの搬入動作及び処理部からトレイへの処理済みワークの搬出動作の両動作を,一対のハンドラにそれぞれ行わせるように駆動制御する。これにより、装置が完全に停止するのを防止できる。 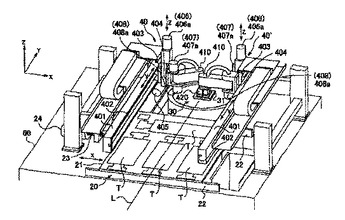 (もっと読む)
(もっと読む)
表面横断装置
本発明は、表面横断装置に関し、この装置は、フレーム、このフレームに設置されるシール外周部を有するシール、およびこの装置を表面に対して移動させるように構成された伝動装置を備える。このシールの外周部は、実質的に、横断されるべき表面と転がり接触するために、適合される。このデバイスは、水平な表面、垂直な表面、反転した表面などに吸引接着し、そしてこの表面に沿って移動し得、そして障害物または表面の不規則性を乗り越え、一方で、この表面に対する吸引接着を維持し得る。このデバイスは、運動する転がりシールアセンブリを用いて、この表面に沿って推進され得る。このアセンブリは、この減圧接着に影響を及ぼすシールと、このデバイスをこの表面にわたって駆動する運動との両方を提供する。  (もっと読む)
(もっと読む)
カルテシアン座標型ロボット
1以上の対象物を掴みおよび取り扱うためのロボットであって、該ロボットは、
第一方向に延びる第一ガイドを持った固定ベース(1)を有し、かつ、アーム(2)を有し、該アームは第二ガイド(22)を有し、第二ガイドは、第二方向へ延びており、第一方向に対して角度をなし、好ましくは第一方向に対して直角をなし、該アーム(2)は、該アーム(2)が第一方向に移動可能となるように第一ガイドによってベース(1)に接続されている。スライド(3)が、第二ガイド(22)上に配置され、かつ、第二方向へ移動可能である。グリッパー(4)が、該スライド(3)によって支持されており、1以上の対象物を掴むためのものであり、該グリッパーは第三方向へ移動可能であり、該第三方向は第一および第二方向からなる面と好ましくは垂直に交差している。多数のアクチュエータ(6a-6d)が、ベース上の固定位置に設けられており、アーム(2)、スライド(3)、およびグリッパー(4)を、引張り要素によって駆動するためのものであり、該引張り要素は、例えば駆動ベルトであって、アーム(2)、スライド(3)、およびグリッパー(4)にそれぞれに接続されている。アーム(2)の中央の長手方向軸と交差し第二および第三方向へ延びている仮想平面に、グリッパー(4)が置かれている。
(もっと読む)
ワーク搬送用ロボット
【課題】アームの熱膨脹収縮により生じるハンド部材の偏位量を許容範囲内に収めることができるアーム回動形のワーク搬送用ロボットを提供する。
【解決手段】固定プーリ8,27と、一端が固定プーリ8,27に対して回動自在に支持されたアーム13,26と、アーム13,26の他端に回転自在に支持された回転プーリ15,29と、固定プーリと回転プーリとの間に張設されたベルト17,30とを備えたアーム機構を多段に設けて、最終段のアーム機構の回転プーリ29にハンド部材40を取り付けたワーク搬送用ロボットにおいて、アーム13,26の熱膨脹収縮によりハンド部材40に生じる偏位を許容範囲に収めるように、テンションローラ22,35からベルト17,30に与える張力を調整するようにした。
(もっと読む)
261 - 274 / 274
[ Back to top ]