
Fターム[3C007HT02]の内容
マニピュレータ、ロボット (46,145) | 伝動装置(挟持装置は除く) (1,840) | 可撓性部材 (556) | ベルト (274)
Fターム[3C007HT02]に分類される特許
141 - 160 / 274
ロボット装置
【課題】 高い剛性を持ち、かつ旋回半径の小さい2アーム方式のロボット装置を提供すること。
【解決手段】 ロボット装置1は、円盤状の据付台2と、筐体3と、2本のアーム部10、20およびアーム部10、20の先端に設置されたハンド部材100、200とからなる。ハンド部材100、200は、2股に分かれたフォーク状の平板であり、液晶ガラス基板をこの2股に分かれた部分に載置可能である。大気雰囲気側となる円筒筐体3には制御基板が格納されている。
アーム部10、20は、同軸に配置されたハブ4、5、6上に設置されている。ハブ4、5、6は、同軸のインハブ型のモータが3段に連なった構成となっており、制御基板により旋回制御される。アーム部20は、アーム部10が前後進する際に、後退したままアーム部10に対して垂直方向に旋回する。
(もっと読む)
ロボット

【課題】把持部を上下動させるための機構を構成する部材のアームからの突出長さを短縮する。
【解決手段】把持部を配設する昇降部材5を、テレスコープ状の直線移動支持機構9の第2の単位可動部材15の下端部寄りに取り付ける。また、昇降用モータ19の回転を直線移動支持機構9の第1,第2の単位可動部材14,15を直線移動に変換させるための機構をラック・ピニオン機構20とし、そのピニオン22とラック23との接触伝導部分をアーム4の下端寄りに位置させる。
(もっと読む)
搬送装置
【課題】真空雰囲気下で加熱された板状ワークを搬送する場合において、当該ワークからの熱による不都合を解消ないし低減する。
【解決手段】搬送装置Aは、固定ベース1と、固定ベース1に対して旋回可能に支持された旋回ベース2と、旋回ベース2に支持され、ガイドレール32A,32Bを含んで構成された直線移動機構3と、ガイドレール32A,32Bに支持され、直線移動機構3の作動によりワークWを水平直線状の移動行程に沿って搬送するハンド4A,4Bとを備える。ハンド4A,4Bとガイドレール32A,32Bとの間には熱反射板8が設けられる一方、固定ベース1および旋回ベース2には、固定ベース1側と旋回ベース2側とを常に連通させる空間502,602を含んで構成された冷媒循環路が設けられている。上記冷媒循環路は、上記熱反射板8に接するように取り回された冷却管71,73,74,76を含む。
(もっと読む)
搬送装置
【課題】移動距離を延長しても、直線移動機構全体の重量化、および旋回動作による慣性力の増大を適切に回避する。
【解決手段】搬送装置A1は、固定ベース1と、垂直状の旋回軸線Os周りに旋回可能な旋回ベース2と、旋回ベース2に支持された直線移動機構3と、直線移動機構3に支持され、ワークWを水平直線状の移動行程に沿って搬送するハンド4A,4Bと、軸線Osに沿って配置され、固定ベース1内のモータM3,M4からの駆動力を直線移動機構3に伝達するための伝動軸25,26とを備える。直線移動機構3は、水平軸線O1周りに回転可能な駆動プーリ335、および、垂直面内に沿うように駆動プーリ335に掛け回され、移動行程の平行線に沿って往復動する出力ベルト337を含んで構成された駆動機構33A,33Bと、出力ベルト337に連結されたハンド4A,4Bを移動可能に支持するガイドレール32A,32Bとを有する。
(もっと読む)
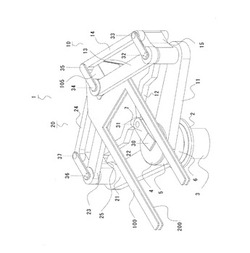
産業用ロボット及び集合処理装置
【課題】各アームを独立して動作させるとともに、各アームの上下方向の座標位置を同じにして、ワークの搬送時間等を短縮することができる産業用ロボットを提供する。
【解決手段】基台部100側からアーム部2及びハンド部3の順で連結され、そのハンド部3を所定方向に向けながら伸縮自在に動作するアーム10を2つ以上有する産業用ロボットであって、アーム10A,10Bそれぞれは、アーム伸縮軸2A,2Bを回動中心としてアーム10A,10Bを伸縮させるアーム伸縮用駆動源4A,4Bと、アーム旋回軸3A,3Bを回動中心としてアーム10A,10Bを旋回させるアーム旋回用駆動源5A,5Bと、ハンド部12の上下方向の座標位置P1,P2をほぼ同じにする連結部材13A,13Bとを備えるように構成して、上記課題を解決した。
(もっと読む)
搬送装置
【課題】据え付け時などにおいて取り扱いが容易な搬送装置を提供する。
【解決手段】固定ベース1と、固定ベース1に対して鉛直軸線Os周りに旋回可能に支持された旋回ベース2と、旋回ベース2に搭載されたガイド部材3と、旋回ベース2ないしガイド部材3に支持された直線移動機構4と、直線移動機構4に支持され、ワークを水平直線状の移動行程に沿って搬送するハンド5A,5Bと、軸線Osに沿って配置され、固定ベース1内のモータM3,M4の駆動力を直線移動機構4に伝達するための伝動軸26,27とを備えた搬送装置A1であって、旋回ベース2は上下に分離可能に連結されたハウジング22と円筒軸21とを備え、ハウジング22には軸線Os周りに回転可能に支持された連結部材61,62が付属させられており、連結部材61,62には伝動軸26,27に対して上方から係合される係合部材71,72が着脱可能に設けられている。
(もっと読む)
脚車輪型ロボット及び脚車輪装置
【課題】移動にかかるエネルギー消費量を節約するのに好適な脚車輪型ロボット及び脚車輪装置を提供する。
【解決手段】脚車輪型ロボット100は、基体10と、基体10に自由度を有して連結され脚車輪装置11を含んで構成される脚部12と、脚部12の股関節部を形成する脚駆動機構部16と一体的に設けられた車輪20と、脚部12を駆動するための動力を付与する関節モータ40と、車輪20の近傍に設けられ、車輪20を駆動するための動力を付与する車輪モータ50とを備え、車輪モータ50の制御により行う車輪20のみを用いた移動制御において、関節モータ40への駆動電力の供給を断ち、関節モータ40の制御により行う脚部12のみを用いた移動制御において、車輪モータ50への駆動電力の供給を断つ。
(もっと読む)
搬送装置
【課題】昇降動作のストローク量を大きく確保するとともに装置全体の高さを低く抑えることができる、低床型の搬送装置を提供する。
【解決手段】固定ベース1と、旋回ベース2と、この旋回ベース2を固定ベース1に対して昇降させる昇降機構3と、旋回ベース2を鉛直状の旋回軸Os周りに旋回させる旋回機構と、旋回ベース2に支持された直線移動機構5と、直線移動機構5に支持され、直線移動機構5の作動によりワークWを水平直線状の移動行程に沿って搬送するハンド6A,6Bとを備えた搬送装置Aであって、昇降機構3は、固定ベース1に対してテレスコピック状に伸縮するように組み合わされた2段の昇降部材31,32と、各段の昇降部材をその下位段の部材に対して昇降させる第1および第2の昇降駆動機構33,34と、を備えて構成されており、かつ、旋回ベース2は、最上位段の昇降部材32に支持されている。
(もっと読む)
配管内作業装置および配管内作業方法
【課題】本発明は、配管を取り外すことなく、配管内面を精度良く正確に移動可能で、配管内の洗浄、点検、検査、予防保全、補修などの作業について、配管を損傷させることなく、安全、確実に実施する。
【解決手段】配管2の内側から各種作業を行う。配管内作業装置1は、走行駆動部3a、3bと、作業装置5と、回転支持機構部9a、9bと、連結機構6と、吊り下げ装置8a、8bと、を備え、走行駆動部3a、3bを配管2の内面に挿入可能とし、これら走行駆動部3a、3bによって作業装置5をこの配管2の内面に沿って円周方向に移動可能に構成したものである。
(もっと読む)
ベルト伝動装置及びそれを備えたロボット
【課題】アイドラプーリを使用せずに簡単な構成でベルトのテンションを調整することができ、テンション調整部の省スペース化や軽量化を実現できるベルト伝動装置を提供する。
【解決手段】1対の回転軸に第1プーリ、第2プーリを配置し、第1の有端ベルトの一端を調整ブロックを介して第1プーリの外周上側に、他端を第2プーリの外周上側に取り付ける。第2の有端ベルトの一端は第1プーリの外周下側に、他端は第1のベルトの巻き掛け方向と逆にして第2プーリの外周下側に取り付ける。第1プーリには調整ブロックの取り付け部に案内部とネジ穴を設ける。ネジ穴へ挿入できるテーパ部を有するテンション調整ネジをねじ込むことによって、調整ブロックを案内部に沿って位置を調整し、第1と第2ベルトの両方のテンションを調整する。調整後はテンション調整ネジを取り外す。
(もっと読む)
二足歩行ロボット
【課題】ロボットの屈伸動作時や膝関節を屈曲させた姿勢時等にもバランスを維持する。
【解決手段】モータ20の本体を大腿リンク10と一体に回動する第1膝部プーリ12に接続し、モータ軸201を下腿リンク15と一体に回動する第2膝部プーリ17に接続する。第1膝部プーリ12と足首関節部5に設けた足首部プーリ13との径比は1:2で両者にはベルト14が巻掛けられ、第2膝部プーリ17と股関節部3に設けた股部プーリ18との径比も1:2で両者にはベルト19が巻掛けられる。モータ20を作動させ両リンク10、15間の相対的な回転位置関係を変えると、膝関節部3の回動と股関節部3及び足首関節部5の回動が連動し、足部6と胴体部1とは互いに同じ姿勢を保って互いに近付くように動作する。このため、床面上で膝曲げを行っても胴体部1は直立姿勢を維持したまま下降し、胴体部1による重心はほぼ鉛直下方に作用するためバランスを崩しにくい。
(もっと読む)
対象物保持アーム
【課題】 半導体ウエハ等の保持対象物の往復運動方向の位置精度を高めることができる保持アームを提供する。
【解決手段】 第1の腕要素(20)が、第1の回転中心(10)を中心として、回転可能に支持され、先端に第2の回転中心(11)を画定する。第2の腕要素(60)が、第2の回転中心を中心として、第1の腕要素に対して回転可能に支持され、先端に第3の回転中心(12)を画定する。伸縮用駆動力発生機構(57)が、第1の腕要素に対して第2の腕要素を回転させる。伸縮用駆動力発生機構によって、第2の腕要素が第1の角度だけ回転したとき、第1の腕要素が、第2の腕要素の回転方向とは反対方向に、第1の角度の1/2の角度だけ回転する。保持部材(80)が、第3の回転中心を中心として、第2の腕要素に対して回転可能に支持される。第1及び第2の腕要素の姿勢を変化させたとき、保持部材が並進移動する。
(もっと読む)
基板搬送ロボット
【課題】基板搬送ロボットのアーム部の基端側を同一点に取付けアーム類に負荷をかけずに基板ホルダーが取付けられるアーム部の先端側が直線運動するようにし、アーム部に装着されるベルト張力を一定にし基板ホルダーがアーム部先端側取付点を支点に回転するのを防止する。
【解決手段】駆動部に結合される二軸の同軸構造型シャフトの各軸にそれぞれ基端側が結合される左右一対の第一アーム及び第一アームと同一の長さで第一アームの先端側に関節部を介してそれぞれの基端側が結合される左右一対の第二アームからなるアーム部と、第二アーム先端側に取り付けられる基板ホルダーとを備え、第一、第二アームの回転運動により基板ホルダーが移動する基板搬送ロボット。基板ホルダーとアーム部との間に第二アーム先端部が取付けられている位置を中心とする回転を防止する回動防止手段を有する。
(もっと読む)
物品の直線搬送装置、及び当該装置におけるベルト体の張力調整方法
【課題】
第1及び第2の各平行リンク機構の連結部に設けられたベルト伝動機構を構成する一対のベルト体の張力調整を容易にすることである。
【解決手段】
第1及び第2の各平行リンク機構LD1 ,LD2 が中間リンク台Eで連結されて、当該中間リンク台Eを構成する上下一対の中間リンク板5が左右一対の中間連結軸S3a, S3bで連結されて、当該中間連結軸S3a, S3bに支持された左右一対の各プーリ体P1,P2 に互いに逆方向の第1及び第2の各ベルト体V1,V2 が部分巻回されて、中間リンク台Eにおいて第1平行リンク機構LD1 の正逆両方向の回動力を第2平行リンク機構LD2 に伝達させる構成の物品の直線搬送装置において、前記一対のプーリ体P1,P2 の一方を軸方向に二分割して、各分割プーリ体P1a, P1bに対して前記一対のベルト体V1,V2 の一端部をそれぞれ固定した構成とする。
(もっと読む)
作業補助装置および複合パンタグラフ機構
【課題】構造の簡略化を図るとともに汎用性の高い作業補助装置を提供する。
【解決手段】本発明に係る作業補助装置A1は、支持ベース1と、支持ベース1に対してZ軸方向に伸縮するZ軸駆動機構2と、Z軸駆動機構2に対して基端部が接続され、この基端部に対して先端部がX軸,Y軸方向に沿って揺動する揺動駆動機構3と、上記先端部に接続され、XYZ方向に操作可能な操作部材4と、操作部材4のXYZ方向の操作力を個別に検出する操作力検出手段5と、操作力検出手段5からの情報に基づきZ軸駆動機構2および揺動駆動機構3を操作部材4の操作方向への移動を支援するように制御する制御手段とを備える。また、揺動駆動機構3は、上記基端部に対して上記先端部がX軸に沿って揺動可能な第1のパンタグラフ機構と、上記基端部に対して上記先端部がY軸に沿って揺動可能な第2のパンタグラフ機構との複合パンタグラフ機構によって構成される。
(もっと読む)
多関節ロボット
【課題】本発明は上下移動軸からの発塵による基板の汚染を防止するとともに、生産性を向上させた液晶用のガラス基板や半導体ウェハ等の薄板状のワークをストッカに出し入れする多関節ロボットを提供する。
【解決手段】搬送物を載置するハンド部(8)と、前記ハンド部(8)と連結され、少なくとも2つ以上の回転関節(3)、(4)、(5)を備え、前記ハンド部(8)を1方向に移動するように伸縮し、軸方向に対向するように配置された多関節アーム(1)と、前記多関節アーム(1)と上下に移動する移動機構(11)とを連結する支持部材(10)と、前記移動機構(11)に備えられた旋回機能を有する台座(13)とからなる多関節ロボット(1)において、前記移動機構(11)は、前記ハンド部(8)の移動方向と同方向にコラム(12)が配置され、前記移動機構(11)に配置された支持部材(10)は、前記ハンド部(8)の移動方向に直交する方向に突出し、前記多関節アーム(2)と連結されたものである。
(もっと読む)
半導体製造用搬送装置
【課題】ワークストック等の搬送元、搬送先の装置の出し入れが狭い環境であっても、迅速、確実にワークを搬送する半導体製造用搬送装置を提供する。
【解決手段】駆動部を格納する本体部2と、回動中心30、40、50を中心として水平方向に回動自在に取り付けられた第1アーム3、第2アーム4、第3アーム5と、ワークを吸引する吸引口64,65を設けた爪62、63を有するハンド部6と、開口部51内にハンド部後端61を支持するスライド部とを備え、ワークストックの棚に差し込んだワークを出し入れする。また、ワーク検出センサ52を備え、ハンド部6が第3アーム5へ後進したときにワークの有無を検出する。
(もっと読む)
基板搬送装置
【課題】 高真空状態下において、半導体基板等を複数の処理チャンバーにおいて効率よく搬送でき、プロセスチャンバーのフットプリントを大幅に縮小可能な基板搬送装置を提供する。
【解決手段】 真空環境2内に、回転駆動軸R4回りに旋回可能な第1アーム130と、第1アーム130に対して所定角度で回動する第2アームと、第2アームの先端で基板を把持可能なツインハンドとが配置された基板搬送装置であって、第1アーム、第2アーム、及びツインハンドを駆動する複数の駆動モータ21,22,23,24の駆動力を同軸配置された複数の各回転駆動軸R1,R2,R3,R4にそれぞれ伝達する伝達ベルト40,41,42,43により、第1アーム130、第2アーム、及びツインハンドは、第1アーム130が旋回中心点として旋回し、第2アームとによるアーム伸縮により所定位置に移動し、ツインハンドがチャンバー間での基板の受け渡しを行うようにした。
(もっと読む)
ハンドラのティーチング方法及びハンドラ
【課題】吸着パッドが半導体チップの上面に接触する高さ位置を、簡単な構成で高精度に求めることができるハンドラのティーチング方法及びハンドラを提供する。
【解決手段】吸着パッドを検査用ソケットに配置されたICチップに向かって下動させるとき、吸着パッドからエアーを噴射させながら下動させる。そして、検査用ソケットにICチップの上面に接触するとき、吸着パッドから噴射しているエアーが、ICチップにて塞がれるようにした。従って、エアーの噴射が塞がれることにより、吸引管内のエアーの圧力の上昇を圧力検出センサが検出することによって、吸着パッドが検査用ソケット内のICチップに接触する高さを求めることができる。
(もっと読む)
歩行ロボット
【課題】不整地等の環境の好ましくない床面上を歩行可能な脚式の歩行ロボットにおいて、歩行に要する消費エネルギーを可及的に抑制するとともに、ロボットの安定性を確保する。
【解決手段】複数のリンク部材と該リンク部材の各々を連結する関節部とで構成される脚を少なくとも三本有し、該脚の駆動により床面上の歩行を行う歩行ロボットであって、脚60A、60B、60Cが接続される胴体部601と、脚の関節部を駆動する駆動手段と、胴体部に設けられ、床面と接触し該胴体部を支持可能とする支持部60a、60b、60cと、駆動手段によって脚の関節部を駆動して床面の歩行を行うとともに、該歩行のサイクルにおいて支持部により胴体部が支えられる状態を所定割合迎えるように脚の駆動を行う歩行制御手段と、を備える。
(もっと読む)
141 - 160 / 274
[ Back to top ]