
Fターム[3C007JT08]の内容
マニピュレータ、ロボット (46,145) | 操縦桿 (385) | 従部と電気的に接続されているもの (361) | マニピュレータ自身に装着するもの (67)
Fターム[3C007JT08]に分類される特許
41 - 60 / 67
操作インタフェースを含む部分が操作者に対して移動可能な装置を制御するための技術
【課題】作業者の意図を考慮に入れた判断を行うことによって、パワーアシスト装置の動作を適切に制御するための技術を提供する。
【解決手段】操作者の手によって操作される操作インタフェースを備え、且つ少なくとも該操作インタフェースを含む部分が該操作者に対して移動可能である装置のための、制御技術であって、操作者の腕部までの距離を少なくとも計測しうる第1の距離センサと、該操作者の下体までの距離を少なくとも計測しうる第2の距離センサと、第1及び第2の距離センサによる計測値に対して所定の演算を行い、該演算の結果に基づいて第1の信号を出力する演算処理手段とを備え、前記所定の演算が、接近する操作インタフェースを操作すべく該操作インタフェースに操作者が手を差し伸べる際の、予め調べられたデータパターンを用いて、センサによる計測値を処理することを特徴とする。
(もっと読む)
移動体の位置決め装置

【課題】水平軸まわりに回動する操作ハンドルを有する移動体の位置決め装置において、操作ハンドル部が回動しているときであっても、操作力入力方向と同一方向に移動体を移動させて移動体の位置決めができる移動体の位置決め装置を提供する。
【解決手段】ベース部22とハンドル部40との間に、平行移動可能な自由度をもたせ、両者間の変位や荷重を検出する際に、検出部材を回動自在とし、検出部材と共に設けられた重力方向保持手段によって重力方向に対して一定方向に保持させることにより、操作ハンドル40bを水平軸まわりに回動させている場合においても、操作力入力の方向と大きさに応じた検出信号出力を、別系統の角度センサ等を用いずに取り出すようにした。
(もっと読む)
マニピュレータ
【課題】 アームとハンドとを備えたマニピュレータにおいて、ハンドを操作するための操作レバーの操作の際に、アームを操作するための操作ハンドルに意図しない操作力が入力されることを抑制する。
【解決手段】パワーアシストアーム(マニピュレータ)は、操作者がハンドの動作を視認可能な範囲内またはハンドが把持対象物を把持するときの音を聞き取り可能な範囲内に設置された操作装置を備えている。操作装置は、棒状体9を有する操作ハンドル13と、6軸力覚センサ10と、操作レバー15とを備えている。操作レバー15は、上側押圧プレート97および下側押圧プレート93と、連結プレート96に貼り付けられた歪みゲージ16とを備えている。棒状体9には、下向きに延びる第1支持棒91と下向きに延びる第2支持棒92とが設けられている。操作レバー15および操作ハンドル13は、固定プレート95に固定されている。
(もっと読む)
パワーアシスト装置およびその制御方法
【課題】パワーアシスト装置によるワークの搬送効率や、パワーアシスト装置を用いてワークを組み付ける場合の位置決め精度を改善するために、搬送途中におけるワークの姿勢を安定させるとともに、作業者による微妙な位置決めを可能とするパワーアシスト装置およびその制御方法を提供する。
【解決手段】接圧センサ3e・3e・・・により、ウィンドウ10に作用する押圧力Fe1〜Fe4を検知し、検知結果を制御装置5に入力する第一押圧力検知工程と、制御装置5により、検知した押圧力Fe1〜Fe4が、予め設定した第一閾値Fcを越えているか否かを判定する押圧力判定工程と、制御装置5により、デッドマンスイッチ6・6・・・が入状態であるか否かを判定するデッドマンスイッチ判定工程と、制御装置5により、第一押圧力検知工程と押圧力判定工程とデッドマンスイッチ判定工程の各結果からフリージョイント4の回転規制を解除するか否かを判定する。
(もっと読む)
パワーアシスト装置およびその制御方法
【課題】ワークを傾斜させながら搬送する場合に、パワーアシスト装置による位置決め精度を確保しつつ、搬送効率の改善を図るべく、ワークを傾斜させながら搬送しても、作業者の操作力が小さく、また作業者が所望する操作方向と実際にワークの変位方向が一致する、操作性の良いパワーアシスト装置およびその制御方法を提供する。
【解決手段】ワーク保持装置3と、ハンドル3cと、ハンドル3cに作用する作業者の操作力を計測する力センサ3dと、ワーク保持装置3を支持するロボットアーム2と、力センサ3dの計測結果に基づいてロボットアーム2の動作を制御する制御装置5と、を備えるパワーアシスト装置1の制御方法であって、ワーク保持装置3には、ワーク保持装置3の傾斜角度を計測する角度センサ6が備えられ、角度センサ6の計測結果と、力センサ3dの計測結果に基づいて、制御装置5によって、ロボットアーム2の動作を制御する。
(もっと読む)
入力装置、制御装置、入力方法、制御方法ならびに、プログラム
【課題】ユーザが押圧操作によって正負の値や方向を直観的に入力できるようにする入力装置等を提供する。
【解決手段】入力装置101において、センサ部102は、ユーザによる押圧の強さを検知し、判断部103は、押圧の強さが第1閾値以上である期間が第1閾時間連続して以降、第2閾値以下である期間が第2閾時間連続するまでの出力期間であるか否かを判断し、取得部104は、出力期間が開始したと判定されると、当該出力期間の開始時点に先行する第3閾時間の期間に検知された押圧の強さの平均を基準値として取得し、出力部105は、出力期間であると判定されている間、検知された押圧の強さから基準値を減算した結果を、指示値として出力する。センサ部102を移動体の表面に貼付し、指示値が正のときにセンサ部を押す方向に、負のときにセンサ部を引く方向に移動体を移動させれば、直観的な移動体の位置操作が可能となる。
(もっと読む)
マニピュレータおよびそれを複数備えたパワーアシスト装置
【課題】マニピュレータおよびそれを複数備えたパワーアシスト装置において、操作性の向上を図る。
【解決手段】パワーアシストアーム1は、動作部としての直動関節5と、回転関節6と、ハンド部8とを備えている。また、パワーアシストアーム1は、各動作部を操作する第1操作部11および第2操作部12と、直動関節5を駆動する直動関節駆動装置と、回転関節6を駆動する回転関節駆動装置と、ハンド部8を駆動するハンド部駆動装置とを備えている。第1操作部11はハンド部8から離れた位置にあり、第2操作部12はハンド部8に近接した位置に設置されている。パワーアシストアーム1は、直動関節5、回転関節6およびハンド部8の力覚を第1操作部11に提示する直動関節力覚提示装置、回転関節力覚提示装置およびハンド部力覚提示装置を備えている。
(もっと読む)
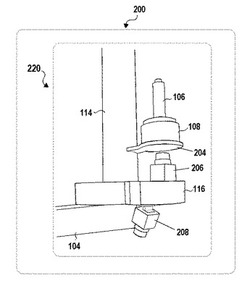
ダイレクト操作装置および配電作業用ロボット
【課題】操作棒に無理な力が作用することなく、操作棒の作用力に倣う方向を維持したまま並進方向の操作力を正確に力センサに伝達することが可能となり、実際の配電作業での適用に耐える安全性の高いダイレクト操作装置を提供する。
【解決手段】ダイレクト操作装置2を、基部20と、基部20に固定された複数の雄コネクタ21と、雄コネクタ21のいずれか1個に接続固定される雌コネクタ22とから構成し、雌コネクタ22が雄コネクタ21の接続を検知する圧電スイッチを内蔵した接合部と、接合部に設けられる力センサ部と、力センサ部を介して立設された少なくとも2自由度の回転機構を備えたフック部とを備え、力センサ部がフック部の引き回しによる力を検知して制御装置10へ出力するようにした。
(もっと読む)
平行リンク駆動機構及びこの駆動機構を備えた搬送装置
【課題】アームの長さを長くしても小さい駆動力でスムーズに移動できる駆動手段を有する平行リンク駆動機構を提供すること。
【解決手段】一対の第1、第2アーム41、42と、一対の第1、第2連結アーム43、44とを平行に配設し、第1、第2連結アームのいずれか一方を静止アーム、他方を運動アームとして、静止アームの端部と第1、第2アームの一端部とを第1、第2支軸61、62及び第1、第2アームの他端部と運動アームの他端とを第3、第4軸支63、64をそれぞれ回動自在に支軸した平行リンク機構3と、この平行リンク機構を駆動する駆動手段と、を有し、静止アーム43には駆動手段GMを設け、駆動手段と運動アームの第3、第4支軸63、64との間に、伝動部材5を襷掛けに懸架して、駆動手段GMの駆動により、第3、第4支軸63、64のいずれか一方の支軸に結合された部分の伝動部材5A、5Bを牽引して運動アーム44を移動させる。
(もっと読む)
五節リンク型ハプティックデバイス
【課題】XY軸とZ軸の操作が干渉しない五節リンク型ハプティックデバイスを提供する。
【解決手段】五節リンク機構2を有する五節リンク型ハプティックデバイスにおいて、五節リンク機構2の所定位置に設けられ五節リンク機構2を操作する操作部3と、Z軸方向を指示する回転型指示機構4とを備え、操作部3の姿勢を五節リンク機構2の姿勢によらず一定にするための平行リンク機構5とを備えた構成とすることで、XY軸とZ軸の操作が干渉しないようにする。。
(もっと読む)
マニピュレータ
【課題】関節部において、動力伝達部材であるワイヤや歯車等が作業対象に接触することを回避可能なマニピュレータを提供する。
【解決手段】マニピュレータの作業部12aは、操作指令部と、操作指令部に設けられた横ローラ及び縦ローラと、横ローラ及び縦ローラの操作に基づいて回転する2つの駆動プーリと、連結部と、連結部の先端側に設けられた第1回転軸Oyと、該第1回転軸Oyと直交する第2回転軸Opと、第1回転軸Oyを構成するシャフト110に軸支された2つの筒体と、後方部が2つの駆動プーリに巻き掛けられ、前方部が2つの筒体に巻き掛けられたワイヤ52及び54とを有する。そして、駆動機構部102は一方の筒体の回転に連動して第1回転軸Oyを中心として動作し、エンドエフェクタ104は他方の筒体の回転に連動して第2回転軸Opを中心として動作する。
(もっと読む)
医療用マニピュレータ
【課題】ロール回転機構の回転角度を容易に認識できるようにする。
【解決手段】マニピュレータ1102は、中空のシャフト108と、シャフト108に設けられたワイヤ52、54、56と、シャフト108の一端に設けられ、ワイヤ52、54、56の少なくとも1本によって動作し、先端を指向する軸Orを中心に回転するロール回転機構を含む先端動作部1118を備える作業部1106とを有する。ロール回転機構で相対的に回転をする基端側部材の先端側面1108aと先端側部材のカバー160のうち、カバー160には、先端側面1108aの相対的な回転の程度を示す回転程度認識手段1208を有する。先端側面1108aは、カバー160の初期の位置を示すアライメントインジケータ1210を有する。
(もっと読む)
マニピュレータ
【課題】術者の感覚に合い、しかも高い操作性を有するマニピュレータを提供する。
【解決手段】マニピュレータは、人手で把持される操作指令部14と、該操作指令部14に設けられ、指で操作される複合入力部34と、操作部から延在する連結シャフト48と、該連結シャフト48の先端に設けられた作業部12とを有する。複合入力部34は、ロール回転機構を駆動するシャトルリング100と、ヨー回動機構を駆動するパッド132とを有する。シャトルリング100の時計方向及び反時計方向の回動操作は、回動検出用第1感圧センサ及び回動検出用第2感圧センサにて検出される。回動検出用第1感圧センサ及び回動検出用第2感圧センサは、シャトルリング100の操作に対して中立位置を基準とした所定の不感帯の範囲で回動操作量を検出しない位置に配置されている。
(もっと読む)
脚式歩行型移動体及び脚式歩行型移動体制御システム
【課題】操縦者の操縦性を向上させ、移動平面上の将来的な脚部の接地位置を容易に選択可能にする脚式歩行型移動体、および脚式歩行型移動体制御システムを提供すること。
【解決手段】操縦者が脚部の接地位置を変更するように操縦することで、平面上を移動制御可能な脚式歩行型移動体において、操縦者を搭乗する搭乗部と、脚部が接地する接地位置を含む、平面上における脚部近傍の領域を撮像する撮像部と、撮像部によって撮像された領域の像を表示する表示部と、を備え、表示された領域の像に併せて、操縦者の操縦により変更される脚部の将来的な接地位置を示す仮想的接地位置を、前記表示部に表示する。
(もっと読む)
無慣性タイプの荷重取扱装置
【課題】 重量の大きな荷重を負荷部に支持し、この荷重に作業者が手を添えてその荷重を移動させる場合においても、負荷部の昇降動作のほか、水平面内での2軸方向の動作をサーボ制御、好ましくは速度サーボ制御される駆動力(モータ出力)によって行うことにより、負荷による水平面内での移動に伴う慣性が前記作業者に作用する影響が殆んどないか乃至は影響を極力小さく抑制した、いわば無慣性バランサー乃至は無慣性タイプの荷重取扱装置を提供すること。
【解決手段】 平行リンク機構を含んだ関節形アーム機構AM1,AM2,AM3の先端側に負荷部5を設けた荷重取扱装置において、前記負荷部5の昇降駆動源と水平面内におけるX,Y軸方向の移動駆動源にサーボ制御されるモータなどによるサーボ制御駆動源を設け、前記負荷部5を前記駆動源のサーボ制御される出力を利用して昇降方向での移動と水平面内での移動をさせることにより、前記負荷部5を手で支える操作者に負荷の水平面内での移動による慣性を感じさせないようにしたこと。
(もっと読む)
架空配電線路用作業装置
【課題】ブーム先端の重量増を抑え、さらには操作性を向上させ、安全にマニピュレータを誘導操作することが可能な架空配電線路用作業装置を提供する。
【解決手段】キャビン2と、キャビン2に取り付けられ、その先端に力センサ32を介して複数種の作業工具34を交換して装着可能なマニピュレータ31と、マニピュレータ31の動作を制御する制御装置38とからなり、キャビン2に搭乗したオペレータHがマニピュレータ31を操作して架空電線路に対して作業を行う架空配電線路用作業装置3において、制御装置38は、インピーダンス制御によって力センサ32で検出された外力の方向へマニピュレータ31を動作させる動作指令を生成する動作指令生成部を備え、動作指令生成部は、力センサ32の出力から、オペレータHが作業工具34へ加えた力のみを抽出する操作力抽出部を設けた。
(もっと読む)
ロボットのダイレクト操作装置
【課題】実際の生産ラインへの適用に耐えうる、安全性の高いロボットのダイレクト操作装置を提供する。
【解決手段】多関節を有するロボット1の先端部に設置された力センサ7と、力センサ7上に立設された複数のロッド状操作部8、9を備え、操作者がロッド状操作部8、9を介して力センサ7に操作力を加えることによってロボット1へ動作指令を与えるダイレクト操作装置2であって、ロッド状操作部8、9の外表面に付設された複数のセンサと、複数のセンサの出力信号の組み合わせから、操作者によるロッド状操作部8、9の把持状態を判断し、その判断結果により力センサ7の出力の有効・無効を切り換えるダイレクト操作制御部6とを備える。
(もっと読む)
マニピュレータ装置
【課題】処置部の位置決め操作と姿勢決めの互いの操作による干渉の影響が少なく、操作性、信頼性、安全性の高いマニピュレータ装置を提供すること。
【解決手段】アーム部231の先端側に設けられ、処置具213をピッチ軸廻り及びヨー軸廻りに回動自在に支持する作業部210と、アーム部231の基端側に設けられた操作部220と、アーム部231内に設けられ、操作部220における操作力を作業部210に伝達する駆動力伝達部とを具備し、操作部は、その軸方向がアーム部231の中心軸Qに軸方向に交差するように配置されるとともに、アーム部231の基端側に取り付けられたブラケット221に対し操作桿軸P廻りに回転自在に支持された操作桿222と、操作桿222に設けられ、処置具213の処置動作、ピッチ軸廻り及びヨー軸廻りの回動動作を行わせるための操作デバイス223を備えている。
(もっと読む)
ロボットシステム
【課題】個々の利用者に応じた必要な機能のみを選択して組み合わせることによってコストの低減や開発・製造時間の短縮化を図ることのできるロボットシステムを提供する。
【解決手段】単独で独立した機能を実行する車椅子ロボット20、立位補助ロボット30、腕部補助ロボット40などのロボット構成要素1eをあらかじめ複数用意しておき、これらを利用者の必要な機能を任意に組み合わせてロボットシステム1を構築する。この組み合わせに際しては、各ロボット構成要素1e(20、30、40)独自の機能を実行させるとともに、集中管理装置60を用いて協調動作も行わせるようにする。
(もっと読む)
ロボットおよびマニピュレータ
【課題】 小型軽量化が可能で、簡易な機構でありながら高信頼性、高剛性および広動作範囲で動力を伝達する。
【解決手段】 動作伝達機構は、可撓性動力伝達機構51と、入力回転軸52と、駆動側リンク53と、従動側プーリ54とを有する。駆動側リンク53と従動側プーリ54とをワイヤ51で接続し、駆動側リンク53とワイヤ51との接続を二重にするか、あるいはカシメ部材56と固定部材84で固定するため、駆動側リンク53に多大な負荷がかかってもワイヤ51が切れにくくなり、信頼性および安全性が高くなる。
(もっと読む)
41 - 60 / 67
[ Back to top ]