
Fターム[3C007JT10]の内容
マニピュレータ、ロボット (46,145) | 操縦桿 (385) | 従部と電気的に接続されているもの (361) | 人の動きをそのまま実現するもの (48)
Fターム[3C007JT10]に分類される特許
1 - 20 / 48
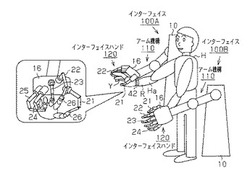
側面設置型力覚提示インターフェイス
【課題】
操作空間が広く、人間の指へそれぞれ3次元の力覚及び仮想物体の重量感を提示でき、さらに、圧迫感や装置の重量感を与えることがなく、安全で、小さな仮想物体を扱うことが可能な側面設置型力覚提示インターフェイスを提供する。
【解決手段】
力覚提示インターフェイスは操作者Hの手の指の運動に追従可能な複数の触覚指21〜25を有する触覚指ベース16と、触覚指ベースの空間運動を可能とするアーム機構110と、操作者Hの手の位置及び姿勢に連動させてアーム機構110を駆動制御するとともに、指の動きに連動させて触覚指を駆動制御するコントローラを有する。力覚提示インターフェイスは触覚指ベース16を操作者Hの手の甲側において甲から離間した状態で、触覚指に対して前記操作者の指に取付けするための指フォルダ26が設けられている。
(もっと読む)
歩行支援装置、及び歩行支援プログラム

【課題】装着者に与える違和感を低減しつつ、装着性の優れた歩行支援装置を提供する。
【解決手段】装着型ロボット1は、装着性を向上させるために筋電センサは用いずに、装着者の運動を検知して動作を制御する。このように装着者の運動を検知して動作すると1次遅れの制御となり、装着者に違和感が生じる原因となるが、装着型ロボット1は、予め装着者の動きを先読みして1次遅れの制御を補完することにより、ユーザに与える違和感を緩和する。具体的な先読み場面としては、エスカレータや動く歩道など、歩行基準面が移動する場合に、装着者が移動する歩行面上で歩行を継続するか否かを推定して先読みし、その結果によって、歩行を継続する場合の制御と、歩行を継続しない場合の制御に切り換える。
(もっと読む)
電動把持部材
【課題】簡易な構造であって小型化・軽量化できる筋電義手を提供することを目的とする。
【解決手段】この発明の電動把持部材1は、指部材支持部2と、指部材支持部3に対して往復運動するスライド部材3と、スライド部材3を駆動する電動モータ4と、第1指部材5と、第2指部材6とを有し、電動モータ4によって第1指部材5と第2指部材6を開閉させるもので、第1指部材5と第2指部材6はそれぞれスライド部材3に取り付けられるスライド部材接続部8と指部材支持部2に取り付けられる指部材支持部接続部9を有し、第1指部材5とスライド部材接続部8aおよび指部材支持部接続部9aは一枚の板状部材の折り曲げにより形成されており、第2指部材6とスライド部材接続部8bおよび指部材支持部接続部9bも一枚の板状部材の折り曲げにより形成されている。
(もっと読む)
特徴点抽出装置及びこれを用いた動作教示装置、動作処理装置
【課題】外部出力装置に教示すべき特徴点を必要最小限に抑えて抽出する。
【解決手段】特徴点抽出装置3として、外部出力装置4の処理動作に伴う動作点の位置情報を予め決められた取込時間間隔毎に時系列で取り込む動作点取込手段5と、前記取込時間間隔よりも長い分割時間間隔dt毎に前記動作点取込手段5にて取り込まれた動作点に基づく動作軌跡を近似直線L(LAB、LBC)として演算する近似直線演算手段6と、この近似直線演算手段6にて演算された近似直線Lの取り込まれた動作点に対する近似精度を予め決められた許容範囲内に設定する近似精度設定手段7と、前記近似直線演算手段6にて演算された近似直線Lの近似精度が前記許容範囲内であるときに、前記近似直線Lを特定する変化点を外部出力装置4に教示すべき特徴点として抽出する特徴点抽出手段8とを備える。これを用いた動作教示装置、動作処理装置をも対象とする。
(もっと読む)
作業補助システム及び作業補助方法並びに該作業補助方法を記録した記録媒体
【課題】工場内の生産ラインにおいて、ロボットと一人の作業者が協調して作業を行うシステムを提供する。
【解決手段】作業者の手に装着され、当該手による作業動作を経時的に測定してその測定結果である動作情報を3次元座標データとして送信するモーションキャプチャ2と、作業者の手に装着され、部品に加わる荷重を経時的に測定してその測定結果である圧力検出データを送信する圧力センサ23と、前記3次元座標データ、及び前記圧力検出データに基づき産業用ロボット4を制御する制御部31とを備える。制御部は、モーションキャプチャから得られた3次元座標データにロボットを追従させ、作業者の手が標準作業位置に到達したと判定すると、作業者が手で部品を押圧することで圧力センサから送信される圧力検出データの値に応じた圧力値で、ロボットの保持部で部品を押圧させる保持部押圧機能31bとを有する。
(もっと読む)
ロボット手術用のツールメモリベースのソフトウェアの更新
【課題】好適なロボット装置等を提供すること。
【解決手段】ロボット手術および他のロボットアプリケーションで使用するためのロボット装置、システム、および方法、および/または医療機器、システム、および方法は、再利用可能なプロセッサおよび限定使用のロボットツールの両方、または医療用プローブを含む。限定使用の構成要素であるメモリは、プロセッサによってインプリメントされるデータを有する機械可読コードおよび/またはプログラミング命令を含む。プロセッサのプログラミングは、プロセッサによって構成要素からダウンロードした新しいデータを一度送ることによって更新することができる。以降の構成要素は、ダウンロードを繰り返さずに更新されたプロセッサを活用することができる。
(もっと読む)
ロボットの動作を制御する方法およびロボットシステム
【課題】ロボットの動作を制御する方法およびロボットシステムにおいて、人間の手とは異なる構造を有するロボットに対し、人間の手のようなリアルタイムの動作の制御を行うことができるものを提供する。
【解決手段】単眼カメラ30およびステレオカメラ40が、教示者10の手首22および手21を含む教示画像を取得する(教示情報取得ステップ、ステップS1)。制御装置200は、教示画像に基づいて、手指の関節および指先の位置を表す手指座標を決定し(手指座標決定ステップ、ステップS3)、この手指座標に基づいて、ロボットハンドの各関節の角度を算出する(ロボットハンド関節角度算出ステップ、ステップS4)。
(もっと読む)
汎用ロボット移動教示装置
【課題】関節数等構成・形状の異なる様々なロボットに対して広汎にハンド・関節の移動後の座標・姿勢を教示することができる装置を提供すること
【解決手段】可動部を有するチューブが多数連なるチューブ群と隣接するチューブ間の角度を検出するフレキシブルセンサチューブと情報教示部より成り、1又は複数の特定のチューブについての変形後の座標及び/又は姿勢を算出し、逆運動学に基づいて教示対象ロボットの対応する1又は複数の特定の部分及び/又は中間部分についての移動後の座標及び/又は姿勢を教示する汎用ロボット教示装置を提供する。
(もっと読む)
筋骨格系機構システム
【課題】本発明は、スレーブロボット(筋骨格系機構部)に力センサを備えることなく、前記筋骨格系機構部に架かる荷重を操作者に知覚させ得る筋骨格系機構システムを提供する。
【解決手段】本発明の筋骨格系機構システムSは、生体の所定の運動に関与する筋肉の活動電位による筋電信号を測定する筋電信号測定部1と、1つの姿勢に対して複数の硬さを持つことができ、前記所定の運動を行うように前記生体の部位を模した機構である筋骨格系機構部3と、筋電信号測定部1で測定された筋電信号に基づいて筋骨格系機構部3の動作を制御する制御信号を生成する制御信号生成部21と、筋骨格系機構部3の姿勢が変化した場合に、前記姿勢の変化量を表す情報を出力する変化量情報出力部4とを備える。
(もっと読む)
姿勢データ入力装置
【課題】より自然な姿勢データを簡易に入力できる技術を提供する。
【解決手段】姿勢データ入力装置は、ユーザが操作可能な複数の関節部を備えるロボット人形と、複数の関節部を駆動する制御手段と、ユーザ操作と制御手段による駆動が加えられた後の各関節部の角度データを姿勢データとして取得する取得手段を備える。各関節部の可動範囲を記憶しておき、制御手段によって各関節部がこの可動範囲内に収まるようにフィードバック制御することが好ましい。また、姿勢データを複数記憶しておき、ユーザが一部の関節部を操作すると、それに対応する姿勢データを抽出して、ロボット人形が抽出された姿勢データに従うようにフィードバック制御することも好ましい。さらに、既存の動作データをロボット人形で再生しつつ、その際に関節部の姿勢変化を許容して、動作データの編集を行うことも好ましい。
(もっと読む)
作業ロボットと、ティーチング方法
【課題】作業ロボットを設置する作業の効率の低下を抑制し、効率よくティーチングできる、作業ロボット及びティーチング方法を提供することを課題とする。
【解決手段】ロボットアーム10に装着される溶接機20aを、ワークWkに対して作業可能な位置に配置したときの溶接トーチ24のヘッド位置情報をコントローラ30に教示する。そして、コントローラ30は、教示されたヘッド位置情報を、ワークWkの作業部位を示す作業位置情報として、ティーチングデータを作成することを特徴とする作業ロボットとした。
(もっと読む)
ハンドパペットマニピュレーションシステム
【課題】従来ハンドパペットを人の手で操っていた方法を自動化制御システムで代替するハンドパペットマニピュレーションシステムを提供する。
【解決手段】ハンドパペットマニピュレーションシステム100は、制御モジュール110とパペット操作装置120とを備える。パペット操作装置120は、ベース122と、ベース122上に設けられ、第1のハンドパペットの胴体と接続され、制御信号を基にベースに対して胴体を制御する身体制御機構121と、身体制御機構121に配置され、第1のハンドパペットの頭部に接続され、制御信号を基に胴体に対して頭部を曲げ、ベースと結ぶ線が胴体の延伸方向である頭部制御機構123と、身体制御機構121に設けられ、頭部制御機構123の両側にそれぞれ配置され、第1のハンドパペットの手部にそれぞれ接続され、制御信号を基に手部を制御し、胴体に対して回転させる1対の手部制御機構とを含む。
(もっと読む)
筋骨格系モデル作成装置および該方法、筋骨格系機構制御装置ならびに筋骨格系機構システム
【課題】本発明は、筋骨格系モデルをより簡易に作成し得る筋骨格系モデル作成装置、該方法、筋骨格系モデルを利用した筋骨格系機構制御装置、該システムを提供する。
【解決手段】本発明の筋骨格系モデル作成装置は、生体の所定の運動に関与する筋肉の筋電信号を測定する筋電信号測定部1と、前記筋肉による力を測定する力覚センサ4と、測定した筋電信号および力に基づいて第1関数の筋骨格系モデルを作成するモデル作成部21とを備え、第1関数は、生体部位のインピーダンス、運動終端での平衡位置および現在の位置を第1パラメータとして含んで表され、生体部位のインピーダンスおよび運動終端での平衡位置は、筋電信号に基づく第2パラメータを共通に含む第2および第3関数によってそれぞれ表され、モデル作成部21は、測定した筋電信号および力に基づいて、第2および第3関数をそれぞれ作成することによって、筋骨格系モデルを作成する。
(もっと読む)
マニプレータシステム
【課題】マスタースレーブ方式のマニプレータにおいて、作業者の労力を軽減する。
【解決手段】マスターアーム10と、マスターアーム10の動作に追従するスレーブアーム30とを備えたマニプレータシステム1であって、マスターアーム10は、自由度7以下の腕部11、ハンド部20及び先端の位置が検出可能な自由度8以上の紐状センサ17を有し、作業者Pがマスターアーム10に動作を入力する動作入力部が、マスターアームのハンド部20に設けられ、紐状センサ17の一端175が作業者Pの頭、首、または体幹に装着され、他端176がマスターアーム30の腕部11の先端部若しくはハンド部20、又は作業者Pの手、手首部若しくは前腕部に取り付けられている。
(もっと読む)
マニプレータシステム
【課題】マスタースレーブ方式のマニプレータにおいて、作業者の労力を軽減する。
【解決手段】マスターアーム10と、マスターアーム10の動作に追従するスレーブアーム30とを備えたマニプレータシステム1であって、マスターアーム10は、自由度7以下の腕部11、ハンド部20及び先端の位置が検出可能な自由度8以上の紐状センサ17を有する。作業者Pがマスターアーム10に動作を入力する動作入力部は、マスターアーム10のハンド部20に設けられている。
(もっと読む)
ロボット制御システム
【解決手段】 操作者が操作手段11のプログラム実行スイッチ11Bを押すと、ロボット2が手動運転モードから自動運転モードに切り換えられて、注ぎプログラムPが実行される。すなわち、グリッパ2Bにより待機位置Aの試験管3が把持されてから注入位置Bまで移送され、そこで試験管3が回転されて受け入れ容器5に液体が注ぎ入れられる。上記待機位置Aでグリッパ2Bが試験管3を把持する際の把持位置は位置演算部13Bによって検出されており、グリッパ2Bによる試験管3の把持位置が予め想定した基準位置とずれている場合には、そのずれ量だけ、その後のグリッパ2Bの移動軌跡が修正される。
【効果】 従来と比較して操作者の作業負担を軽減することができる。
(もっと読む)
ロボット操作入力装置およびそれを備えたロボット
【課題】操作者の動作に追従するようにロボット脚を操作することのできるロボット操作入力装置を、従来よりも少ない数のセンサにて実現する。
【解決手段】ロボット操作入力装置は、歩行可能な脚2を有するロボット1の当該脚2を操作するための入力装置である。ロボット操作入力装置は、操作者100の足115を支持する足支持部材32と、足支持部材32と一体化されまたは足支持部材32に取り付けられ、操作者100のくるぶしに追従して動く追従部材31と、追従部材31に取り付けられた6軸力覚センサ20と、を備えている。
(もっと読む)
ロボットシステム
【課題】セル生産方式の製品生産に適用可能なロボットシステムを提供する。
【解決手段】物を掴むための手ユニット123cを有するロボット120と、ロボット120の操作者11の動作を検出する検出部110と、ロボット120の動作を制御するロボット制御部130とを備え、検出部110は、操作者11の手に取り付けられ、該操作者11の手にかかる圧力を検出する第1圧力検出部111を有し、ロボット制御部130は、第1圧力検出部111により検出される圧力と同じ圧力が手ユニット123cにかかる状態で、ロボット120が検出部110により検出された動作と同じ動作を行うよう手ユニット123cの動作を制御する動作指令生成部131を有する。
(もっと読む)
遠隔操作ロボット装置
【解決手段】 遠隔操作ロボット装置1は、操作者が所持して動かす操作手段2と、操作手段2の位置と姿勢を検出するセンサ3と、このセンサ3による検出結果を基にしてロボットハンド5aを操作手段2の動きに追従させる制御手段4を備えている。
ロボットハンド5aには、赤と緑の表示ランプ5G、5Rが設けられており、操作者により操作手段2の制御スイッチ2Aが押されると緑の表示ランプ5Gが点灯される。その後、操作者が操作手段2を速く動かしすぎた場合等のオペレータ異常が生じると赤の表示ランプ5Rが点灯される。
【効果】 操作者が操作手段2を動かす際に、オペレータ異常が生じたことを容易に認識できる。
(もっと読む)
入力装置、制御装置、入力方法、制御方法ならびに、プログラム
【課題】ユーザが押圧操作によって正負の値や方向を直観的に入力できるようにする入力装置等を提供する。
【解決手段】入力装置101において、センサ部102は、ユーザによる押圧の強さを検知し、判断部103は、押圧の強さが第1閾値以上である期間が第1閾時間連続して以降、第2閾値以下である期間が第2閾時間連続するまでの出力期間であるか否かを判断し、取得部104は、出力期間が開始したと判定されると、当該出力期間の開始時点に先行する第3閾時間の期間に検知された押圧の強さの平均を基準値として取得し、出力部105は、出力期間であると判定されている間、検知された押圧の強さから基準値を減算した結果を、指示値として出力する。センサ部102を移動体の表面に貼付し、指示値が正のときにセンサ部を押す方向に、負のときにセンサ部を引く方向に移動体を移動させれば、直観的な移動体の位置操作が可能となる。
(もっと読む)
1 - 20 / 48
[ Back to top ]