
Fターム[3C007JU15]の内容
マニピュレータ、ロボット (46,145) | 教示装置、操作盤 (625) | 操作盤のタイプ (328) | 固定型操作盤 (22)
Fターム[3C007JU15]に分類される特許
1 - 20 / 22
サービス提供システム及びサービス提供方法
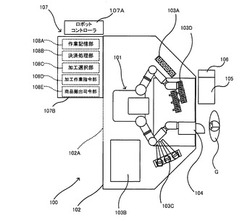
【課題】無人あるいは通常よりも少ない人員であってもより多様な商品及び役務を提供することができるようにしたサービス提供システムを提供する。
【解決手段】インターフェイスにより注文入力情報の入力を受け付け、インターフェイスにより入力された注文入力情報に基づいて、ロボットユニットに加工作業を実行させロボットユニットにより加工作業を施した商品を提供する。
(もっと読む)
作業用装置

【課題】可動部位を含む作業機において、実際に作業機を動かす前に作業機のどの部位が作動するか、または、どのように作動するかを瞬時に把握した後、同一の操作で速やかに作業機を作動させ、操作性を向上することができる作業用装置を提供する。
【解決手段】操作手段の所定量未満の第1の操作量の操作を行うと、アクチュエータの駆動によって作動する部材に対応付けられた部位を、実際に作動する部材を作動させるときと同一の操作を行うことによって、いずれの部材が作動するか、または、どのように作動するのかを画像表示部220に識別表示し、操作手段の所定量以上の第2の操作量の操作で、前記識別表示した部位に対応する部材を作動させる。
(もっと読む)
情報処理装置および情報処理方法
【課題】過去の映像を用いてユーザ操作を支援するための補助的情報を提示する。
【解決手段】情報処理装置100は、任意の位置および向きを示すポインタを含む所定空間内の大域映像を取得する大域映像取得部104と、前記大域映像から前記所定空間内の位置情報を取得する位置情報取得部108と、前記所定空間内で撮像された映像データと、前記映像データの撮像された位置および向きの情報を含む映像情報とを関連付けて記憶している記憶部と、前記ポインタの示す位置および向きに対応する前記映像データを、前記大域映像に重畳して表示画面に表示する映像表示部101と、を備える。
(もっと読む)
作業機械の操作支援装置
【課題】アクチュエータの駆動によって直接的に作動している部位をオペレータが確実に把握できるようにすることで、誤操作を生じにくくする作業機械の操作支援装置を提供する。
【解決手段】動作させる部材に対応付けられた部材の画像143´を、実際の部材の相対位置関係に近似させて画像表示させるための画像表示部220を備え、部材のうちアクチュエータの駆動によって直接的に作動している部材を特定するとともに、特定された部材に対応する部材の画像143´を、他の部位の画像130´,141´,142´,150´と識別可能に画像表示部220に表示させるようにした。
(もっと読む)
ロボットのツールの位置の微調整方法及びロボット制御システム
【課題】
教示位置の微調整時の操作手順が減るため、教示時間を低減させることが可能であり、回転操作手段の操作のみで予め定められた動作座標系の予め定められた進行方向の座標軸に沿って移動させることができ、位置の微調整時の教示を楽に行うことができるロボットのツールの位置の微調整方法及びロボット制御システムを提供する。
【解決手段】
回転操作部材13をエンターキー11aにより溶接トーチTの位置の微調整操作手段として割付する。回転操作部材13が操作された際、回転操作部材13の回転量及び回転方向をロータリエンコーダ14に検出させて、回転量及び回転方向をコントローラ20に通知する。コントローラ20のCPU21が、回転量の単位毎に予め定めた寸動量で、かつ、回転方向と対応して、予め定められたツール座標系のZ軸に沿って、ロボットRを動作制御し、溶接トーチTの位置の微調整を行う。
(もっと読む)
制御装置
【課題】本発明は、大小ユニットを立体的に配置するとともにメンテナンス性も損なわない制御装置を提供する
【解決手段】ロボットを制御する制御装置101であって、前記制御装置101の内部に上下段にユニット102〜107が配置され、さらに上段ユニット102〜106が前後に少なくとも1つが配置され、前記上段ユニット102〜106の前方ユニット102、103が前記制御装置101の外側に引き出されて前記上段ユニット102〜106の奥側ユニット104〜106がアクセスされるものである。
(もっと読む)
汎用ロボット移動教示装置
【課題】関節数等構成・形状の異なる様々なロボットに対して広汎にハンド・関節の移動後の座標・姿勢を教示することができる装置を提供すること
【解決手段】可動部を有するチューブが多数連なるチューブ群と隣接するチューブ間の角度を検出するフレキシブルセンサチューブと情報教示部より成り、1又は複数の特定のチューブについての変形後の座標及び/又は姿勢を算出し、逆運動学に基づいて教示対象ロボットの対応する1又は複数の特定の部分及び/又は中間部分についての移動後の座標及び/又は姿勢を教示する汎用ロボット教示装置を提供する。
(もっと読む)
人型ロボットの自動制御のための方法及び装置
【課題】 ロボット関節への多様な制御を提供する。
【解決手段】 ロボットシステム11は、物体に対し力制御を行う複数の関節を有する人型ロボット10と、ユーザーから入力信号を受け取るグラフィカルユーザーインターフェース(GUI)24と、コントローラ22とを備える。GUIは、ユーザーにコントローラへの直観的プログラムアクセスを提供する。コントローラは、入力に応じてロボットの物体レベル、エンドエフェクタレベル及び/又は関節空間レベルを各々制御するインピーダンスベースの制御フレームワークを使用して関節制御する。制御方法は、GUIを介し所望の力等の入力信号を受け取り、ホスト装置で入力信号を処理し、インピーダンスベースの制御フレームワークを介して関節制御する。フレームワークは、ロボットの物体レベル、エンドエフェクタレベル及び/又は関節空間レベルを各々制御し、機能ベースGUIが動作モードのミリアドの実施を簡単化する。
(もっと読む)
ロボット用コントローラ
【課題】構成部品の共通化を図りコントローラの製造コストを下げることを目的とする。
【解決手段】ロボット用コントローラ10であって、回路基板60を備えたコントローラ本体12と、嵌合面をコントローラ本体12の外側に向けた状態で、コントローラ本体12に取り付けられた第1コネクタ72Eと、第1コネクタ72Eを通じて電力の供給を受けロボット用コントローラ10の駆動状態を表示する表示部材90又は第1コネクタ72Eを開閉可能とする開閉部材80のいずれか一方の部材と、前面部40に形成され、表示部材90又は開閉部材80のいずれか一方を択一的に係合させる係合部48とを備えたことを特徴とするロボット用コントローラ。
(もっと読む)
ロボット制御装置
【課題】本発明は、省スペース化するとともに、装置内部の放熱の問題を解決できるロボット制御装置を提供する。
【解決手段】複数台ロボットを1台のコントローラで制御するロボット制御装置であって、複数台のロボット駆動装置部21〜26の上部に共通制御回路27を備えたものである。
(もっと読む)
産業用ロボットコントローラ
【課題】産業用ロボットコントローラの小型化を実現するとともに表示灯の視認性、コネクタの脱着性を向上し、狭いスペースにも設置することができる産業用ロボットコントローラを提供すること
【解決手段】産業用ロボットコントローラ1のフロントパネル2を、天板から傾斜して前方に突出するように形成された第1フロントパネル2aと、底面から傾斜して前方に突出するように形成された第2フロントパネル2bと、の2面で構成した。
(もっと読む)
ロボット制御システム
【課題】可搬式操作部の制御手段が過負荷か否かの判定に応じてロボットを制御するロボット制御用の制御部が転送する画像データ量を動的に調整することにより、可搬式制御部の制御手段の過負荷状態を抑制することができるロボット制御システムを提供する。
【解決手段】
ロボット制御システム30はティーチペンダント10のCPU11の負荷率を測定するCPU負荷測定部118と、負荷率に基づいてCPU11の過負荷を判定するCPU負荷監視部119を備える。ロボット制御システム30はCPU負荷監視部119の過負荷判定に応じて、CPU11の液晶ディスプレイ17に対する表示制御を軽減するためにネットワーク通信機25から送信される画像データ量を減少させる画面監視部216及び圧縮展開部218を備える。
(もっと読む)
操作装置およびソフトキーボタンへの操作画像の割り当てのための方法
【課題】工作機械、生産機械、クレーンおよび/またはロボットを操作するための操作装置におけるソフトキーボタンへの操作画像の簡単な割り付けを可能にする。
【解決手段】操作装置1が画像スクリーン2、ソフトキーボタン3a,3b,3c,3dおよび操作ボタン4を有し、操作画像の呼出し時に呼び出された操作画像が可視化されるように操作装置1が構成されていて、操作ボタン4を押すことによって使用者メニューが可視化されかつ長い時間にわたって1つのソフトキーボタンが押されることによってこのようなやり方で押されたソフトキーボタンが呼び出された操作画像に割り当てられるように操作装置1が構成されている。
(もっと読む)
工作機械、生産機械および/またはロボットの操作のための操作装置
【課題】簡単に構成可能な操作装置を可能にする。
【解決手段】本発明は、操作装置(1)がディスプレイ(4)および透明板(2)を有し、ディスプレイ(4)が透明板(2)の背後に配置されていて、透明板(2)がディスプレイ(4)の外側に張り出した縁範囲(3)を有し、操作装置(1)が表示装置を有し、表示装置によって表示信号(5a,5b)が縁範囲(3)を通して送出可能である工作機械、生産機械および/またはロボットの操作のための操作装置に関する。
(もっと読む)
工作機械、生産機械、又はロボットとして形成された機械の操作装置
【課題】工作機械、生産機械、又はロボットとして形成された機械の簡単な操作を可能にする。
【解決手段】機械を操作するための操作装置1がディスプレイ2を有し、ディスプレイ2によって同時に第1の操作ウィンドウ3a及び第2の操作ウィンドウ3bが可視化可能であり、機械の操作のための第1のアプリケーション4aが第1の操作ウィンドウ3aに可視化可能であり、機械を操作するための第2のアプリケーション4bが第2の操作ウィンドウ3bに可視化可能であり、第1のアプリケーション4aの操作は第1の操作ウィンドウ3aに所属する第1の操作キー5aを用いて行われ、第2のアプリケーション4bの操作は第2の操作ウィンドウ3bに所属する第2の操作キー5bを用いて行われ、第1の操作キー5aは第1の操作ウィンドウ3aの単一の又は複数の側方に沿って配置され、第2の操作キー5bは第2の操作ウィンドウ3bの単一の又は複数の側方に沿って配置されている。
(もっと読む)
ロボット装置
【課題】ロボット本体の動作とロボット本体画像の動作との間に誤差が生じた場合であっても、設定通りにロボット本体を動かす教示プログラムを作成することができるロボット装置を提供する。
【解決手段】可動部1a〜1cを有するロボット本体1と、ロボット本体1に電気的に接続され、ロボット本体1の教示プログラムを作成する教示体2とを備えたロボット装置であって、教示体2は、画像を表示するディスプレイ3と、外部からディスプレイ3の画像を操作可能なマウス4とを有し、ディスプレイ3には、ロボット本体1を示すロボット本体画像15と、ロボット本体画像15を動作させる第1のスイッチ画像16a〜16cが表示され、マウス4により第1のスイッチ画像16a〜16cが操作されると、教示体2がロボット本体画像15を動作させるとともに、連動してロボット本体1を動作させる。
(もっと読む)
ロボット制御システム
【課題】オペレータの意図通りに移動ロボットを操縦することが容易となるロボット制御システムを提供する。
【解決手段】オペレータがコントローラを操作することによって移動ロボットを操縦するロボット制御システムであって、コントローラは、移動ロボットに動作命令を入力する手段と、オペレータに移動ロボットの制御状態を表示する表示手段を有しており、移動ロボットは、本体と、本体を移動させる手段と、移動ロボットの姿勢状態を検出する手段と、コントローラから入力された動作命令に基づいて移動ロボットの姿勢状態の目標値を決定する手段と、移動ロボットの姿勢状態が決定された目標値が示す状態となるように移動手段を制御する手段と、検出手段が検出した姿勢状態と目標値との差分値を算出する手段とを有しており、表示手段は移動ロボットが算出した差分値に基づいた指標を表示する。
(もっと読む)
柔軟なディスプレイを備えた操作盤
【課題】従来相当の操作キー及びディスプレイ機能を維持しつつ、さらなる小型化を図ることができる操作盤を提供する。
【解決手段】操作盤10は、フレキシブルディスプレイ12、複数の操作キー14及びフレキシブルディスプレイ12をロール状に巻いた状態で格納可能な格納部16を有する。フレキシブルディスプレイ12は、第3操作キー14cを使用しない第2の操作モードにおいて、画像表示領域をより広くするために、第3操作キー14cを覆う第2の位置まで格納部16から引出されることができる。
(もっと読む)
ローダの位置教示装置
【課題】ローダが本来停止すべき位置からどれくらい、どの方向に外れているのかを視覚的に判断できて、作業者がローダ位置を簡単に修正できるローダの位置教示装置を提供する。
【解決手段】ローダの位置教示装置は、対象機械1のチャック2に対するローダチャック14の上下左右の相対位置を検出する相対位置検出手段31を備える。また、この相対位置検出手段31の出力に従い、対象機械1のチャック2の位置とローダチャック14の位置を表示装置34の画面上に図で表示する相対位置表示手段35を有する。作業者の入力操作によって前記移動機構16を動作させてローダチャック14の位置を変更するローダ操作手段36と、作業者の入力操作が行われることでローダチャック14の現在位置をワーク渡し位置として前記停止位置記憶手段23に記憶させる教示位置指定手段37を備える。
(もっと読む)
ロボット制御システム
【解決手段】 ロボットヘッド1aの位置および姿勢を制御するロボット制御システム2であって、操作者が保持する操作ヘッド3と、上記操作ヘッドの位置および姿勢を検出するセンサ4とを備えている。
上記制御手段の姿勢認識部24は、操作ヘッドに設けられた制御スイッチ12が入れられると、該制御スイッチが入れられた際の操作ヘッドの初期姿勢を認識し、併せて操作ヘッドの姿勢の変化による初期姿勢からの変位ベクトルを求める。
姿勢変換部25は、初期姿勢からの変位ベクトルを、所定の基準姿勢に対応する該基準姿勢からの変位ベクトルへと変換し、制御手段は当該基準姿勢からの変位ベクトルにロボットヘッドの姿勢を追従させる。
【効果】 操作者がどのような姿勢で操作ヘッドを保持しても、操作ヘッドの位置および姿勢の変化に対して、ロボットヘッドの位置および姿勢を追従させることができる。
(もっと読む)
1 - 20 / 22
[ Back to top ]